3D打印BLDC机器人执行器(伺服电机)


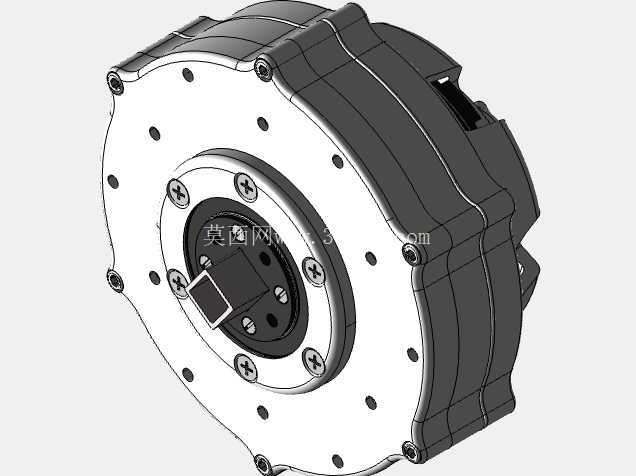
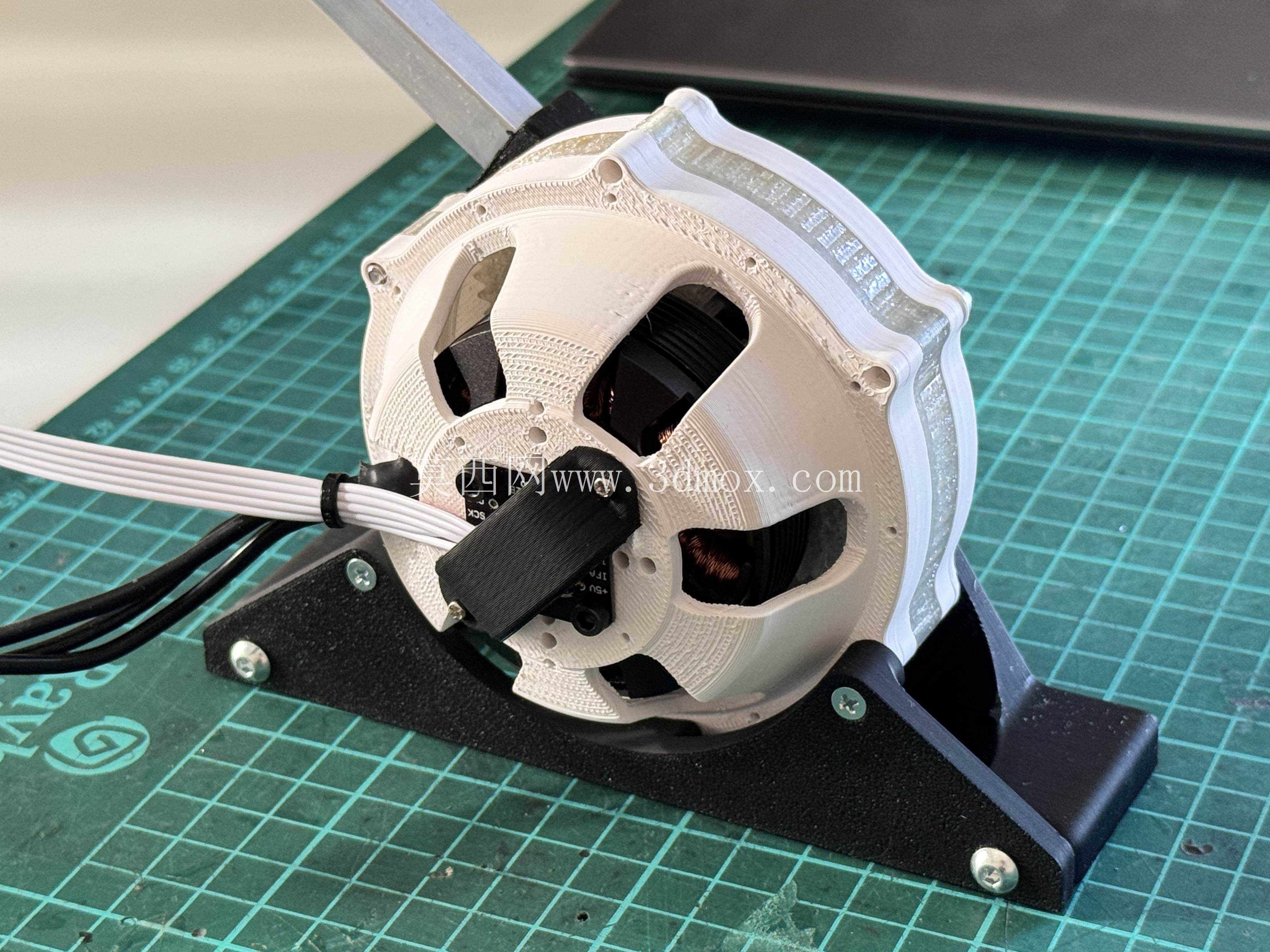
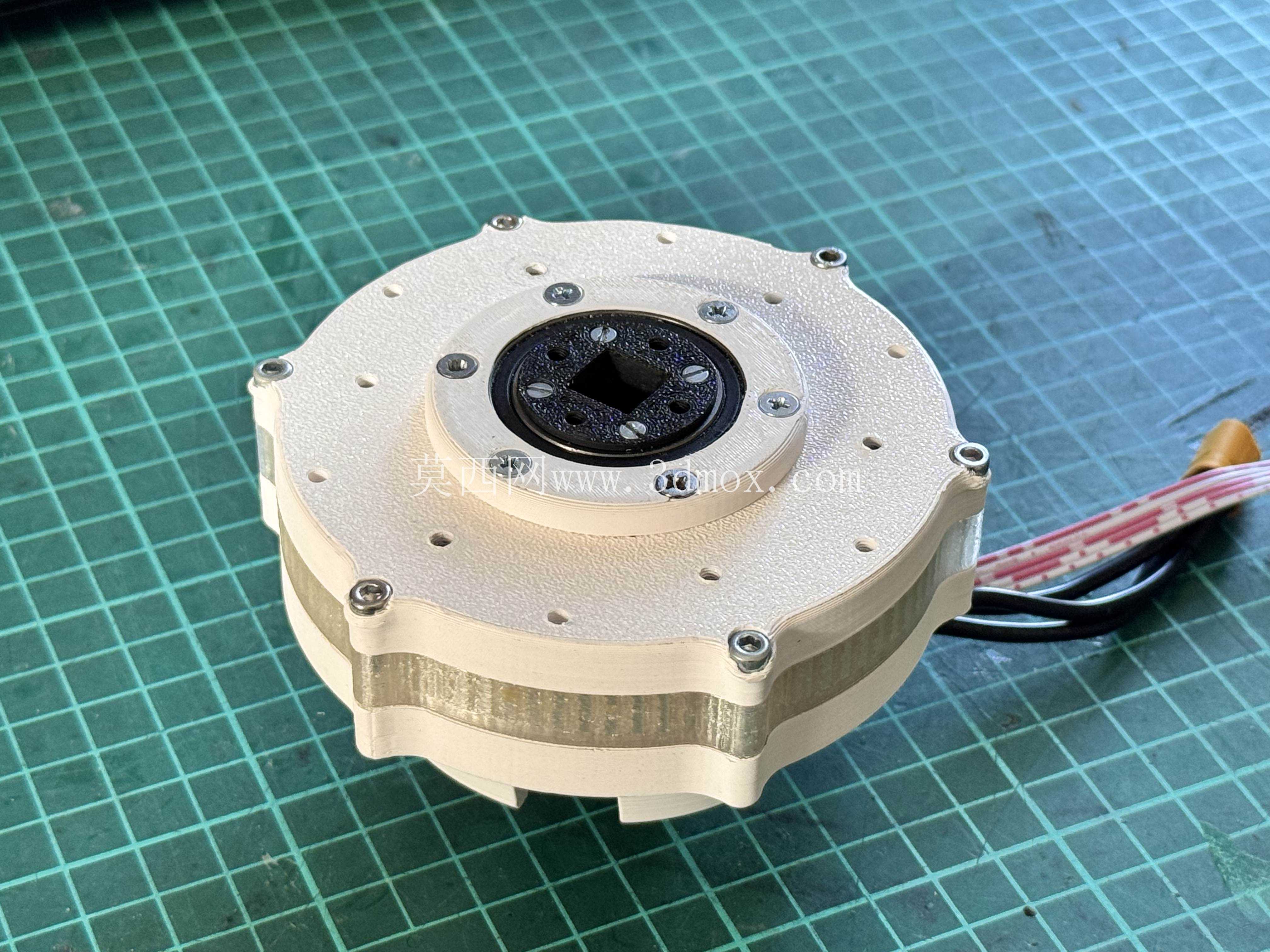
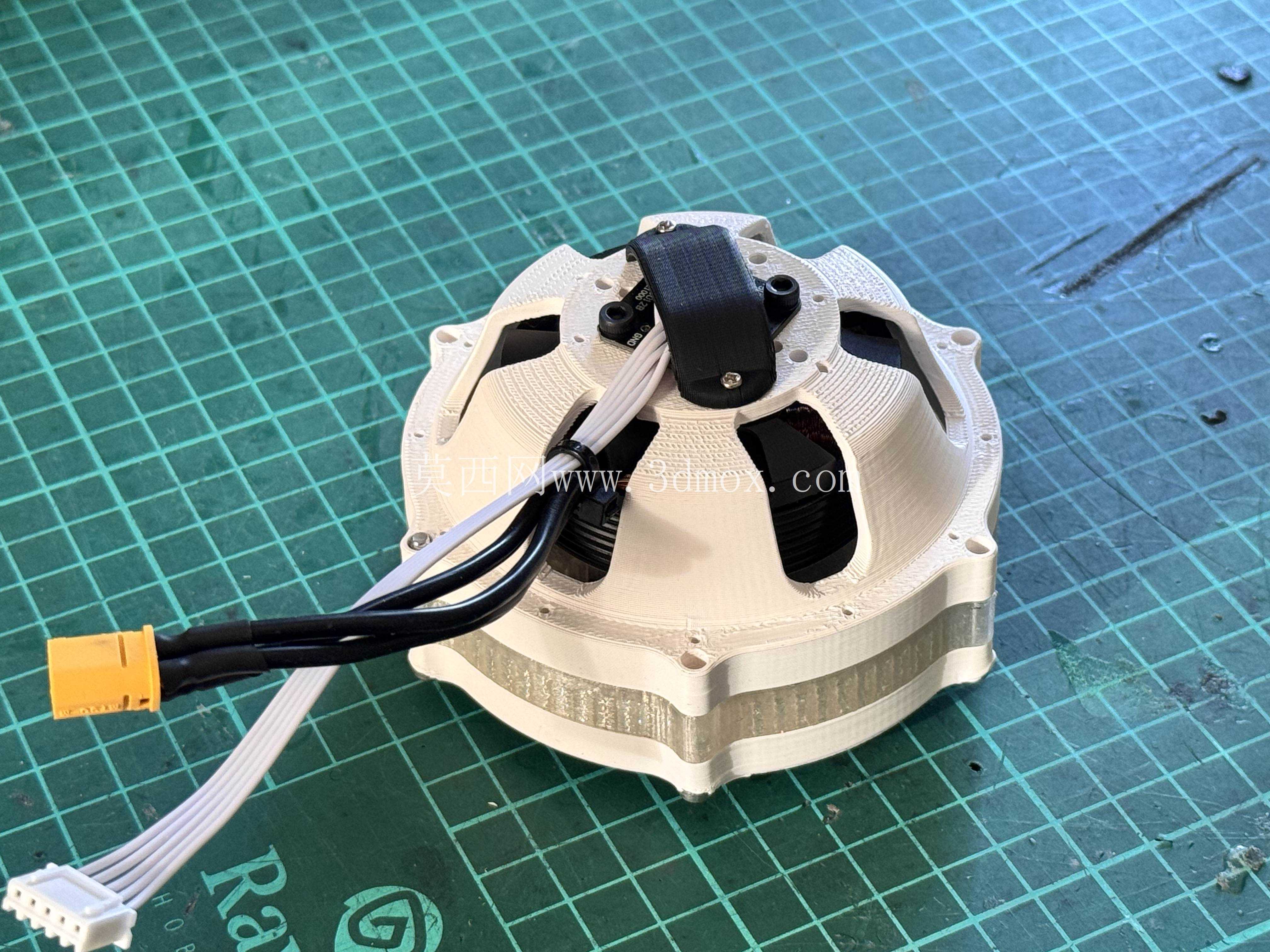
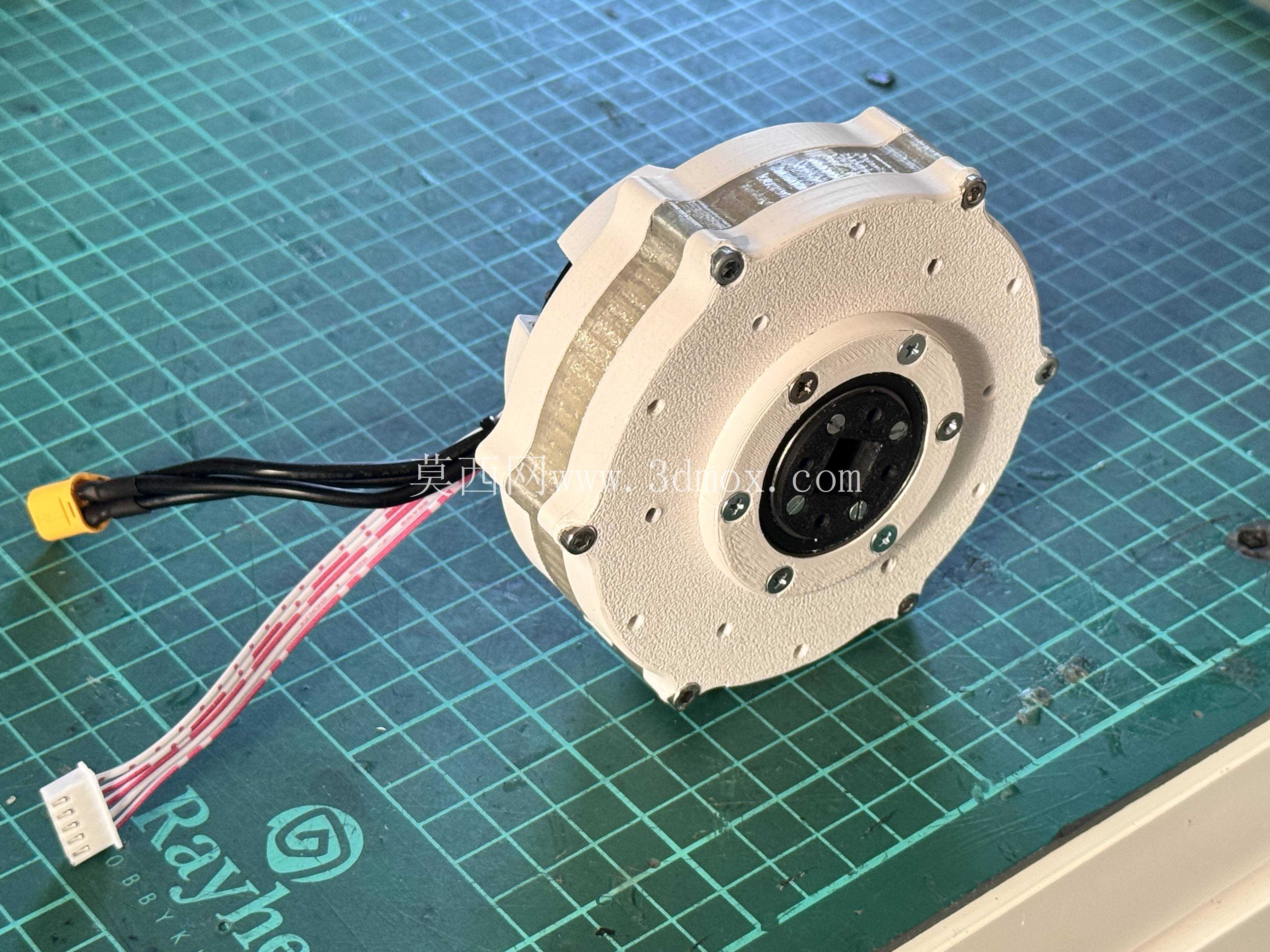

使用 QX 电机、磁性编码器和 3D 打印行星齿轮箱和主体制成的全 3D 打印执行器,由 ODrive 3.6 电机控制器控制。规格:齿轮减速:9.8:1 最大输出速度:320 rpm 持续最大扭矩(25A 限制):7 Nm 突发最大扭矩(40A 限制):10Nm 间隙:(还无法测量,但几乎可以测量) 不可观察)重量:325g它非常适合需要快速、准确、动态和可反向驱动执行器的机器人项目。对于预算构建或原型特别有用的模型,因为零件仅花费约 50 欧元(不含电机控制器)。就我而言,我使用的电子设备是:- QX 电机 QM6008-320 kv 无刷电机- Makerbase TLE5012B FOC 磁性编码器- ODrive 3.6 电机控制器板和执行器由以下部件组成:- ASA 印刷外壳 - PC 印刷齿轮 - PLA 印刷转子和测试台 - 3 个 buc:3 × 10 × 4 毫米轴承 - 一个 25 × 37 × 7 毫米轴承 - M3 8 毫米、12 毫米和 30 毫米螺丝 - M3 螺纹嵌件 - 2 毫米 x 12 毫米自攻螺丝 如果您打算自己制作一个,它可以轻松适应其他电机和 编码器组合只需修改一个部分即可。 另外,如果您有任何疑问,请随时给我留言:)
------分隔线----------------------------

说点什么吧
- 全部评论(0)

还没有评论,快来抢沙发吧!
- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,Rendering