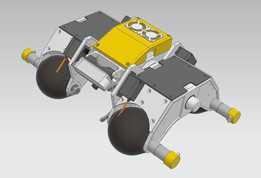
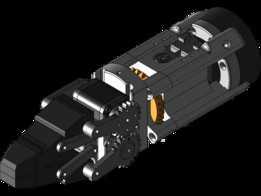
Unitree H1 斜角变速箱臂


这是我实习时制作的夹具的最终版本。用 6 个 M3 沉头螺钉固定在机器人前臂上。夹具由 2 个 Dynamixel AX-12A 移动(来自库/dynamixel-ax-12a 的文件)。
------分隔线----------------------------
- 上一篇:FDM 3D 打印机从设计到制造
- 下一篇:无人机用于电力线路巡检

说点什么吧
- 全部评论(0)

还没有评论,快来抢沙发吧!
- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES