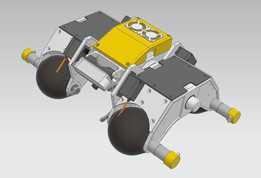
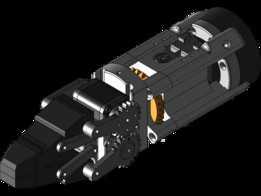
带球轮的磁性机器人
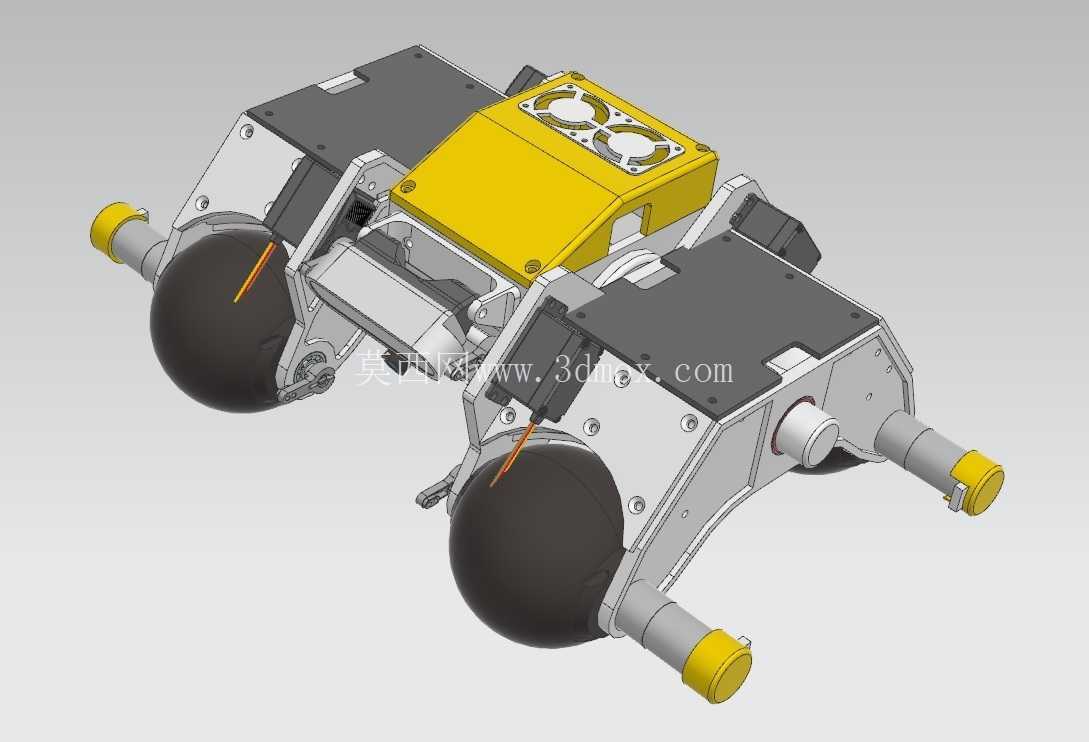
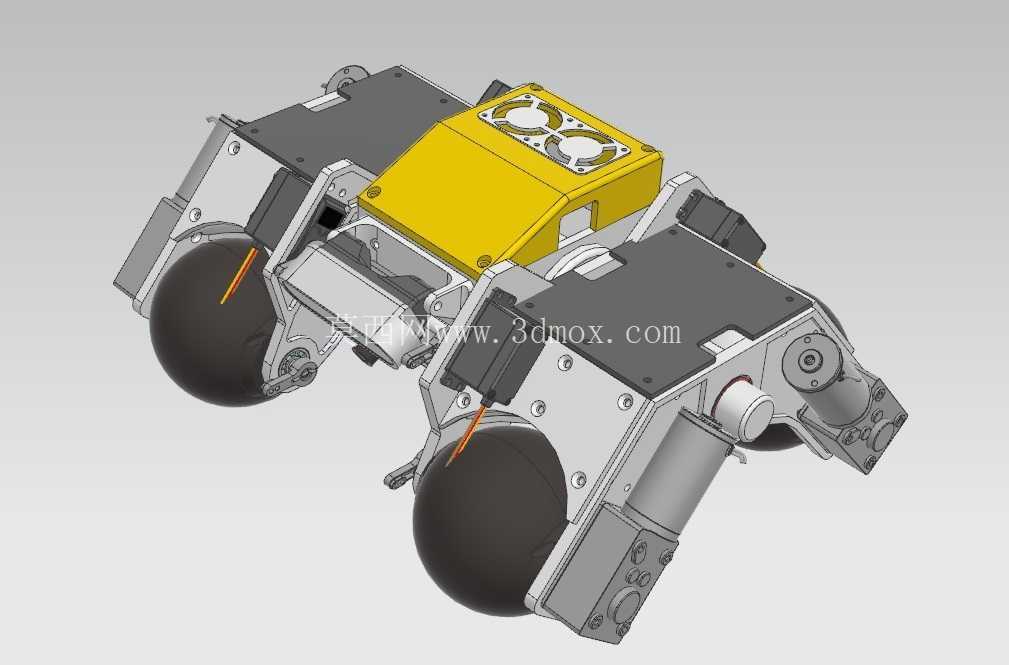



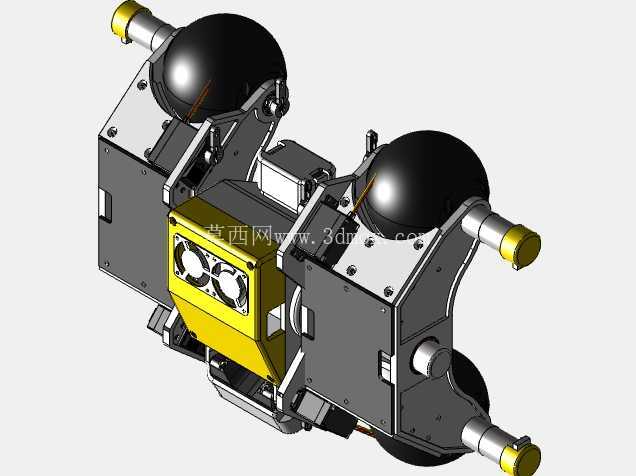
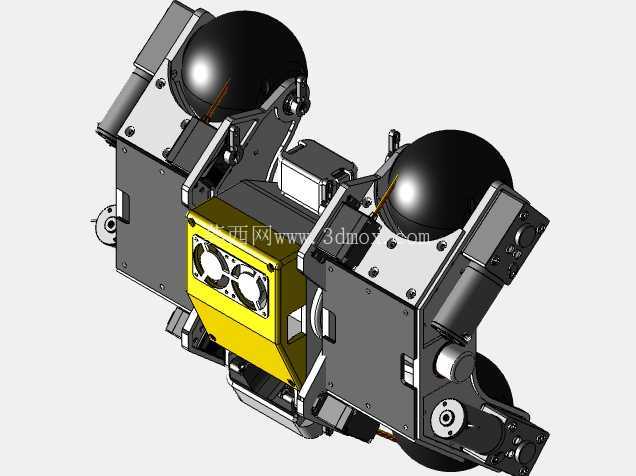

带有球形轮的磁性机器人,用于储罐检查。 受 J. Li、H. Li、L. Song 和 Y. Wang 的启发,“智能爬墙焊接机器人系统的设计与实验验证”。大多数零件可以打印或激光切割。 使用熔化的螺纹螺母。 要安装微芯片,请使用粘合剂固定尼龙支架。根据表面选择磁铁和电机。 为了更好地与表面接触,可以使用粘合剂。装配中使用的模型链接:12pc 陶瓷轴承 8x22x7:library/full-ceramic-bearing-id-8mm-od-22mm-18pcbearings 4x11x4:library/complete-metric-600-miniature-series-double-sealed-bearing-library-solidworks-and-step-models-12pcbearings 20x32x7:library/complete-metric-6200-2rs-double-sealed-bearing-library-solidworks-and-step-models-14pc jga25-370 电机:library/motor-dc-jga25-370-12v-350rpm-con-encoder-1or4pc 31ZY 电机:library/geared-motor-13我衷心感谢作者 使用 3D 模型。如果您有任何疑问,请私信我。


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,Rendering