

С��ȫ���γ�/����վ������������ѹ����̥��3D ��ӡ TPU��


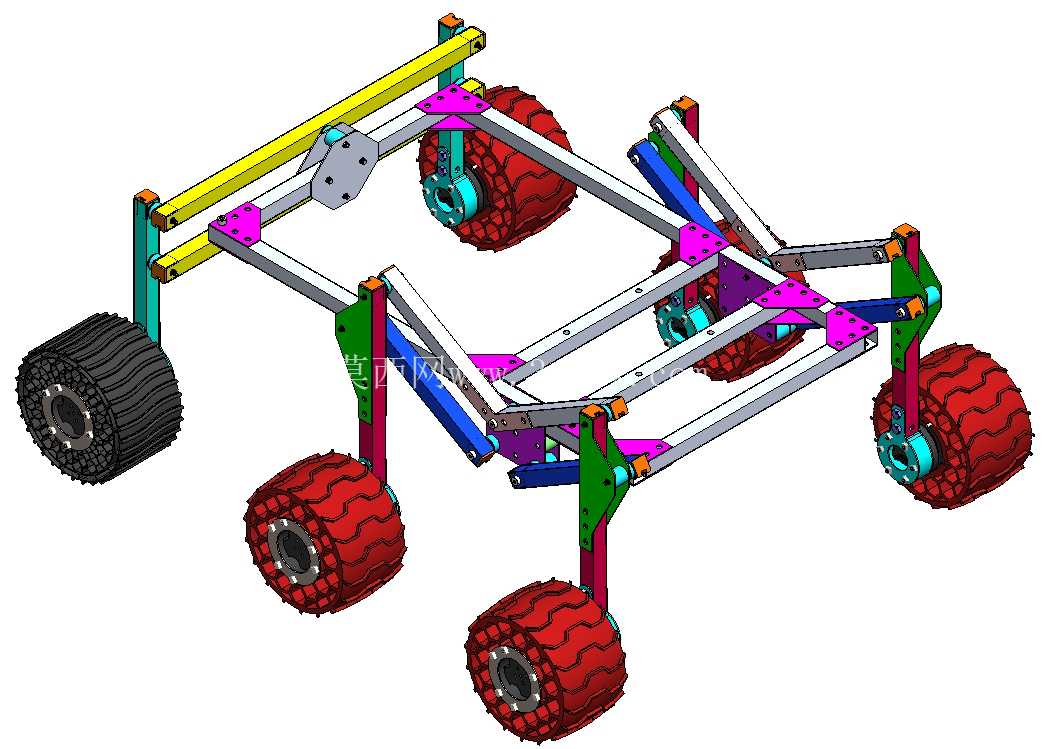

רΪС�� ATV ��ģ���������˼�ʻ�������γ���Ƶ�������̥���ܵ� DARPA Ϊ HMMWV �����ķdz�����̥���������������ƽ�����ѹ��ԭ��Ӧ�������ʡ��� 3D ��ӡ�����γߴ硣������������� Delta Roboticsat Universidad Aeron��utica en Quer��taro (UNAQ) �����ϵͳ���ɣ� ī����.�C�C�C�C�C�C�C�C�C�C�C�C�C�C�C�C�C�C�C�C�C�C�C���C�C�C�C�C�C�C�C�C�C�C�C �⾶��200 ���רC ���ֱ����80 ���רC ���ȣ�120 ���רC ���ʣ����� TPU��3D ��ӡ���C ����������ÿ������ 5 ��������6 �����ӿ�֧�� 30 ��� ����վ)�C�C�C�C�C�C�C�C�C�C�C�C�C�C�C�C�C�C�C�C�C�C�C�C�ṹ��֤�C�C�C�C�C�C�C�C�C�C�C�C�C��Ansys Mechanical�н���ģ��C��С��ȫϵ����5.8 @ 5 kgf���븺�بC���ع�����������Ĵ�ֱѹ���C�C�C�C�C�C�C�C�C�C�C�C�C�C�C�C�C�C�C�C���� DESIGN��������������������������������������������Key geometry is driven by equations �� outer diameter, hub size, external thread count,and thickness can be adjusted directly in the model file parameters.��������������������������������������������IDEAL FOR��������������������������������������������? Small UGV / rover platforms? ATV-scale robotics ��Ŀ? FDM 3D ��ӡ��TPU ��˿��? �о���ѧ��ԭ������? ��������Ӧ����ϵͳ������ѹ�� �̴����ա� ����ӡ��

- ȫ�����ۣ�0��

- ģ�ʹ�С ��δ֪
- �� �� ��5Ī����
- ���ش��� ��
- �����ļ� ��SOLIDWORKS,Rendering,Snagit

















