带有机械臂的漫游车 Mohamed Kamal WALL-E 团队
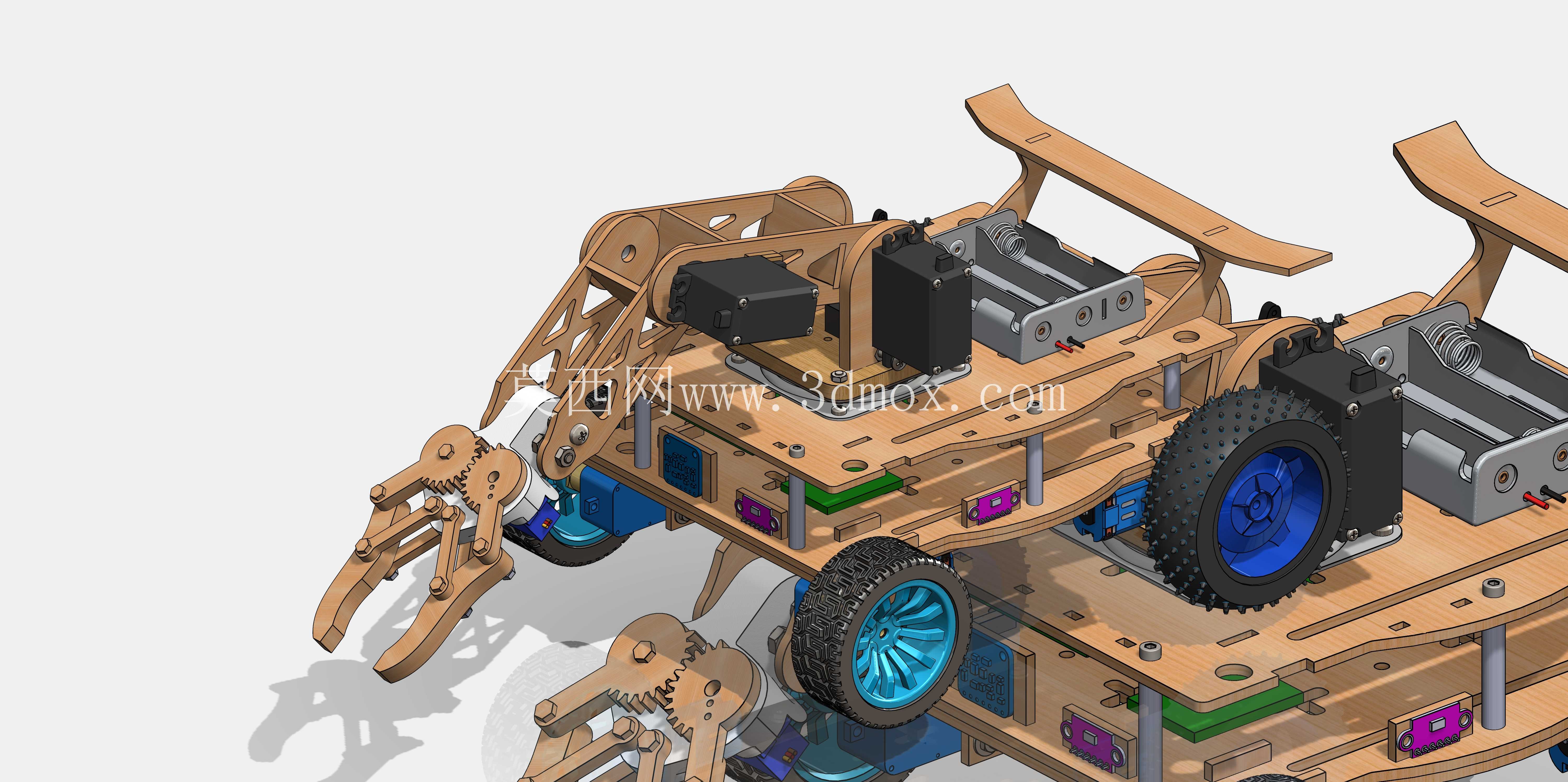
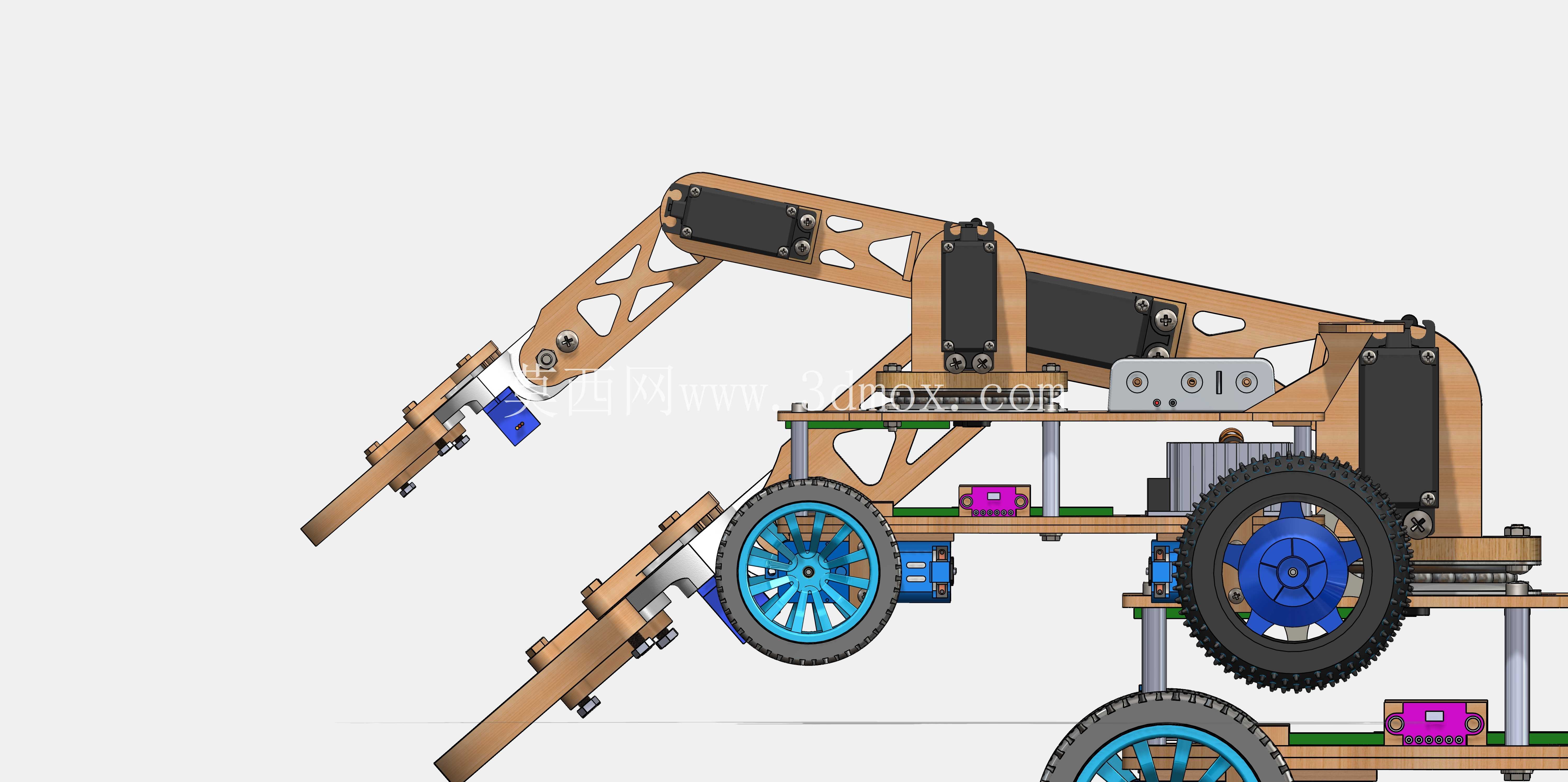
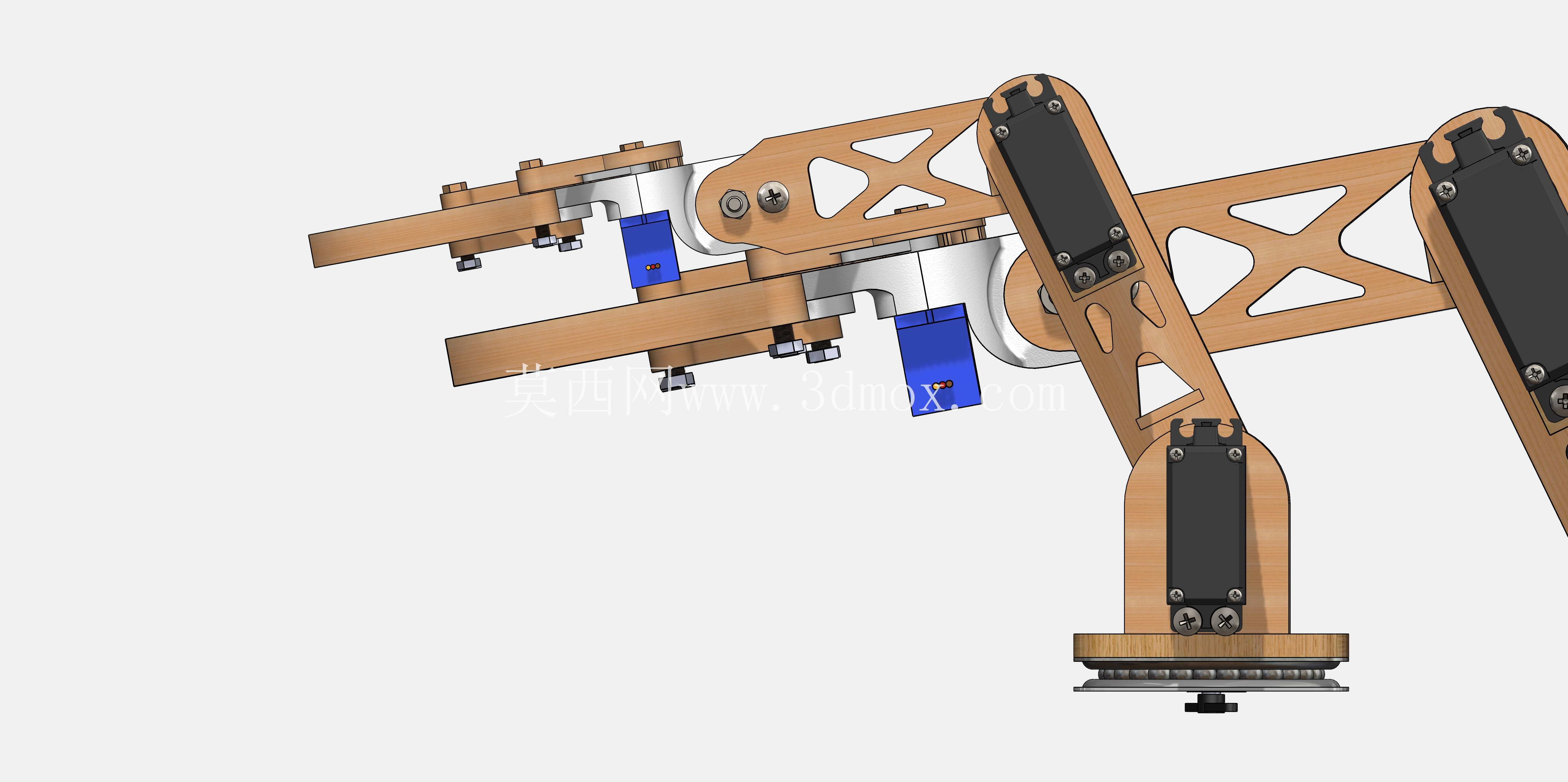
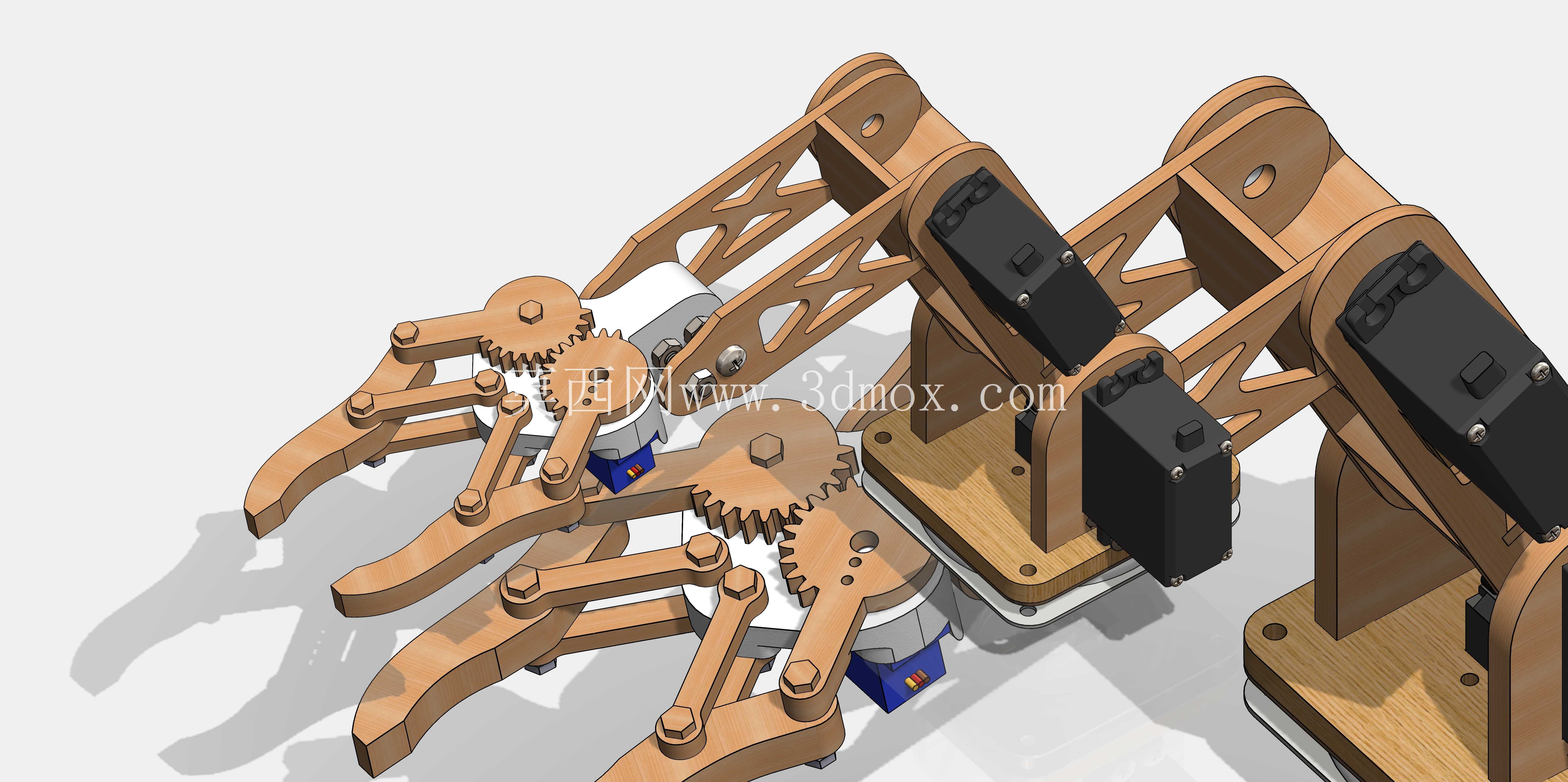


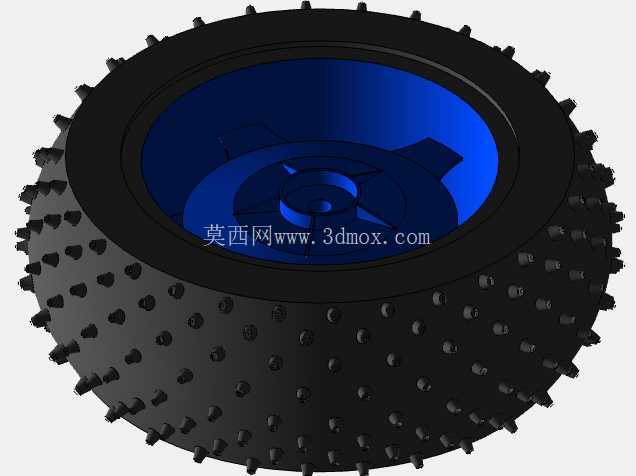
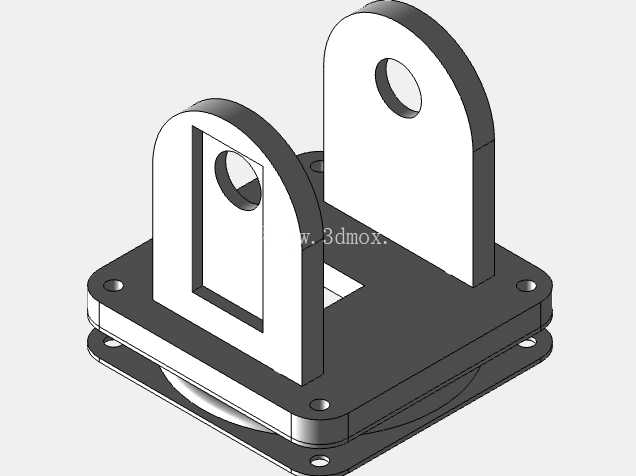
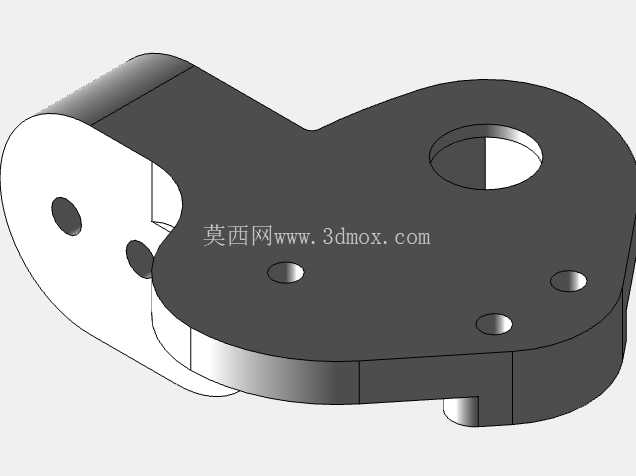
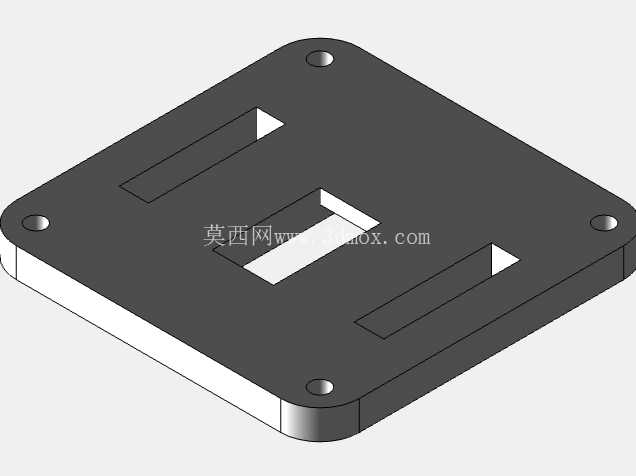

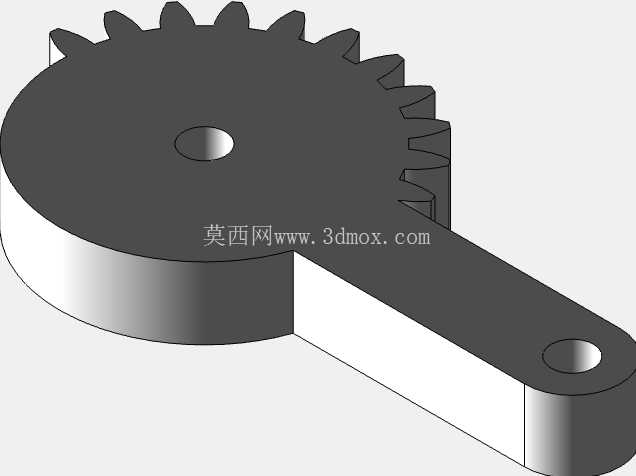
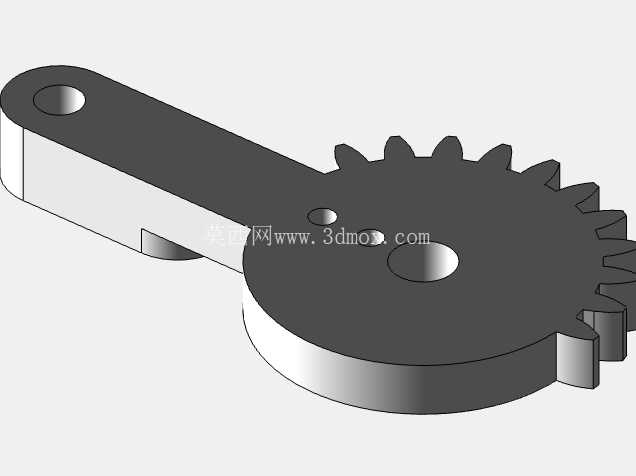

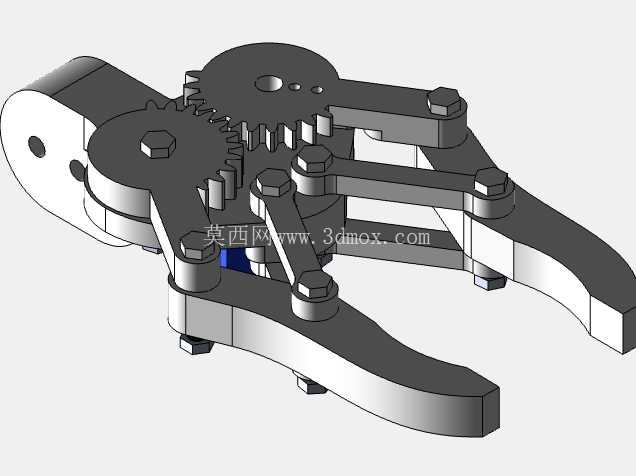









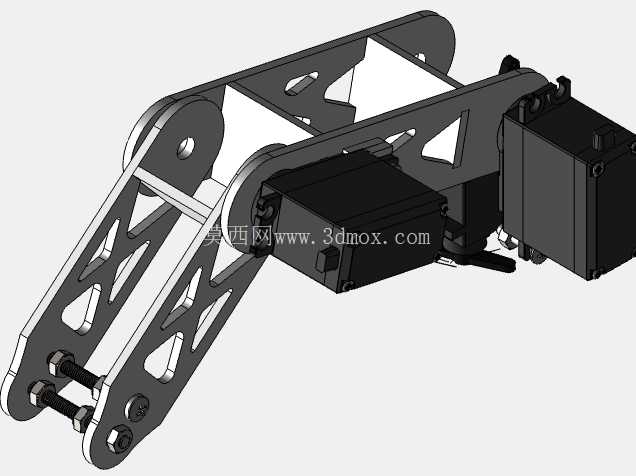





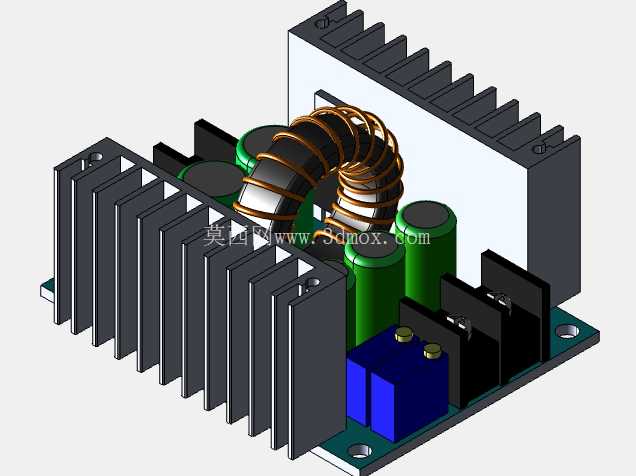

配备多轴机械臂的自主漫游车的综合 3D CAD 模型。 该项目旨在平衡强大的地形移动性和精确的操纵能力,使其成为漫游者隆隆竞赛 (RRR) 等竞争性机器人应用或一般自主系统研究的理想选择。 主要设计特点:机械臂组件:专为精确的空间操纵和逆运动学应用而设计。 该机械臂包括定制的齿轮轮廓,旨在最大限度地减少间隙并确保平稳的动力传输。流动站底盘:针对稳定性和有效负载分布进行优化的耐用结构底座。传感器集成就绪:该模型包括安装基本自主导航硬件的结构考虑因素,例如飞行时间(ToF)传感器、MPU6050(陀螺仪/加速度计)模块和环境颜色传感器。制造注意事项:该组件包括根据实际制造和装配而设计的组件,包括定制焊接轮廓和 特定材料应用(例如胶合板齿轮机构)。软件:在 SOLIDWORKS 中本地建模。包含的文件:本地 CAD 装配体和零件文件,以及标准中性格式 (STEP/STL),以便于查看和 3D 打印。请随意下载、探索装配体,并在评论中留下任何反馈或问题!


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS,STEP / IGES,Rendering