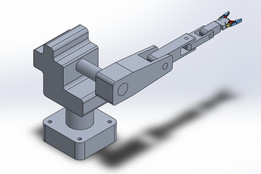
改进的机器人设计

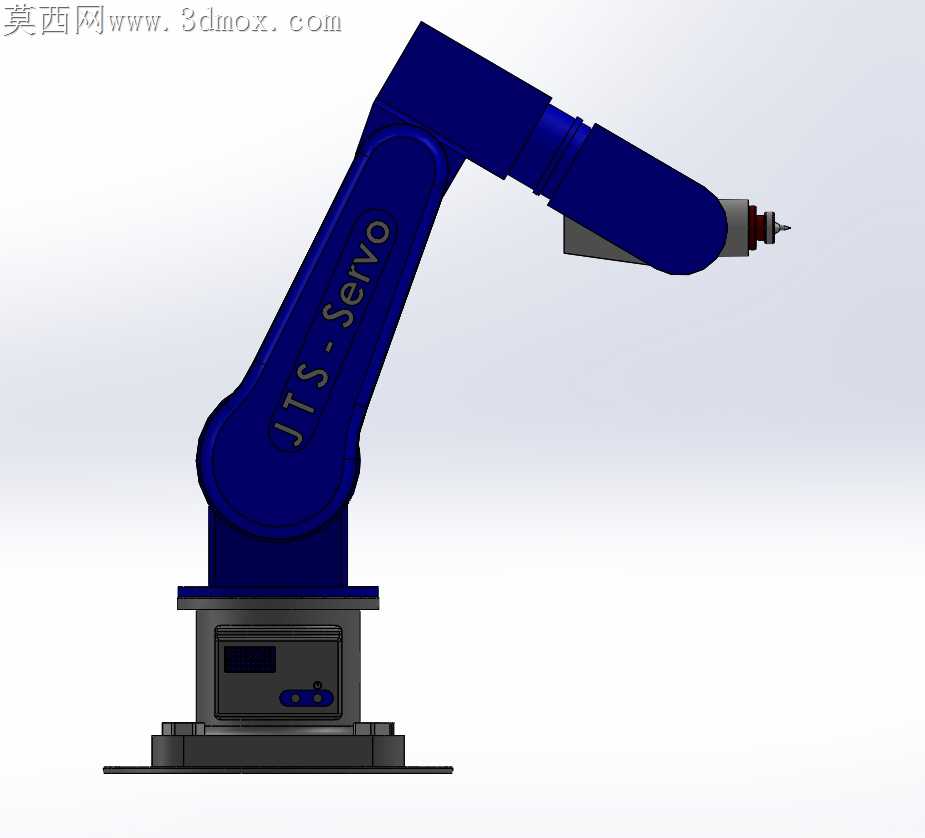
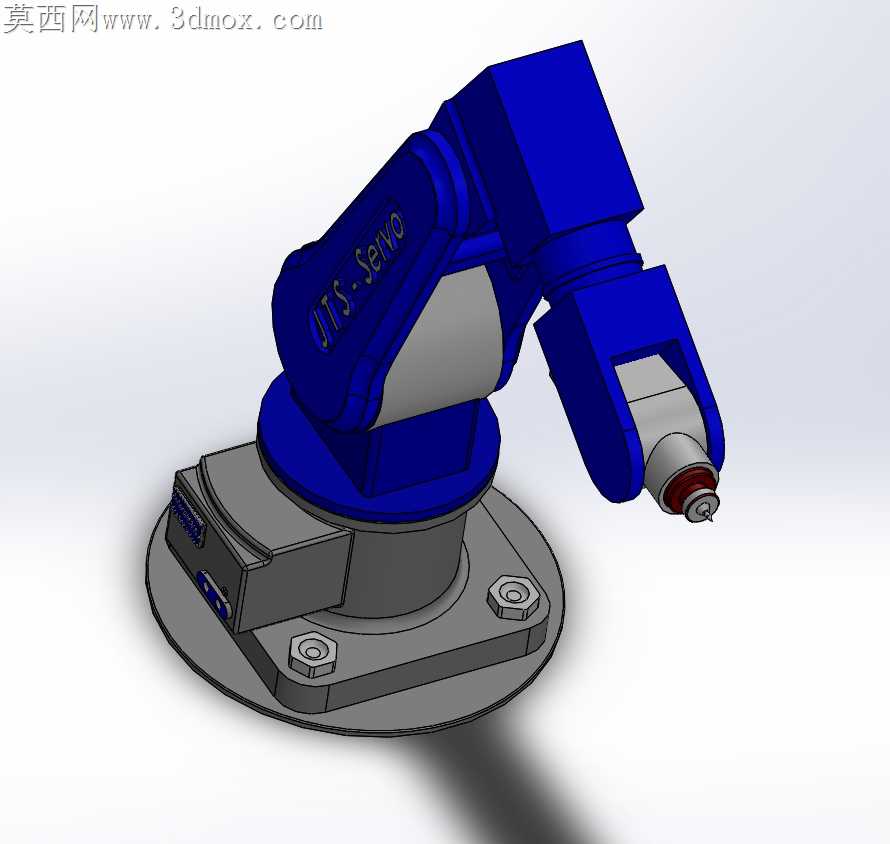
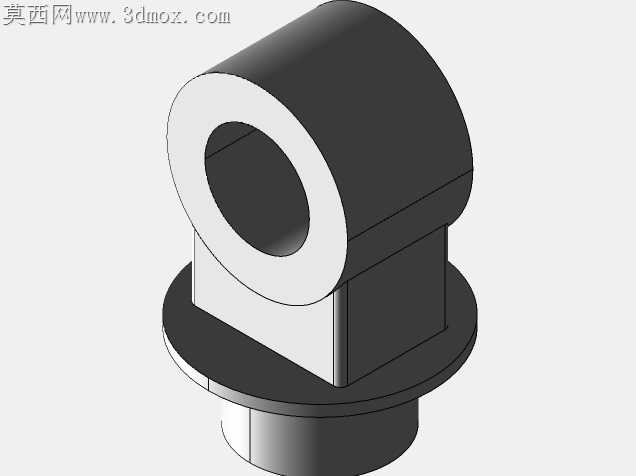


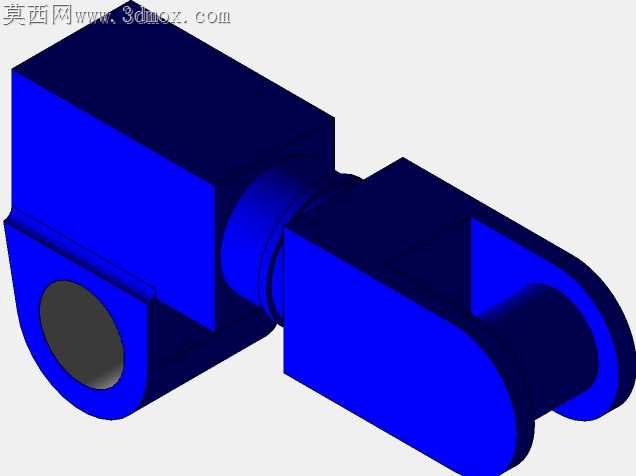
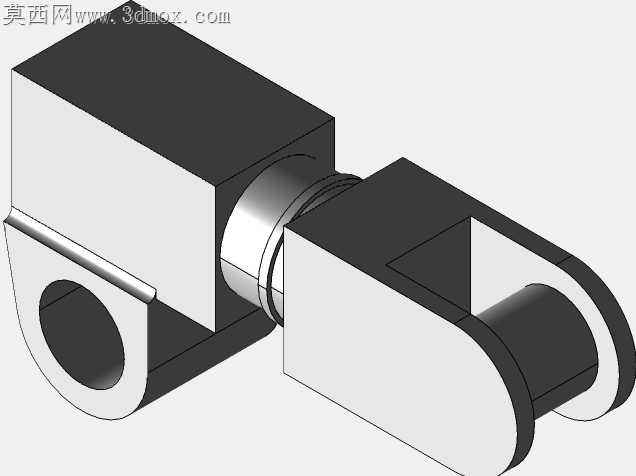
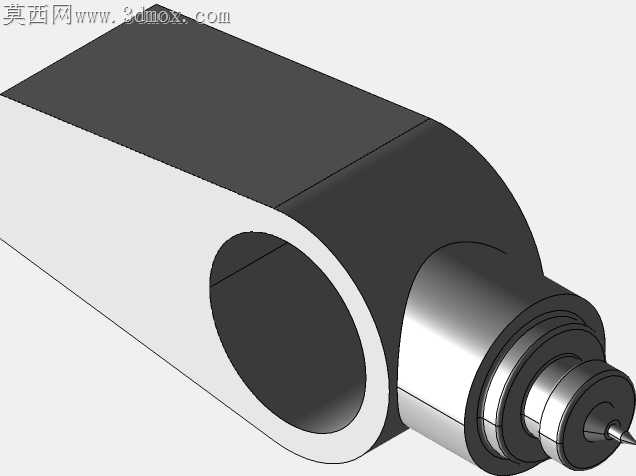

这是一个对改进后的机器人装配进行简单运动学仿真的设计项目。机器人在SOLIDWORKS中创建和组装,MATLAB GUI程序由MATLAB生成。改进后的机器人装配是简单机器人装配的第二个版本。考虑并删除了各种设计约束,如零件数量和重量。该项目由三部分组成:有潜力驱动改进机器人的MATLAB GUI程序、改进机器人装配图和简单机器人装配图


- 模型大小 :20.99 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS,STEP / IGES,Rendering,SOLIDWORKS