机械臂
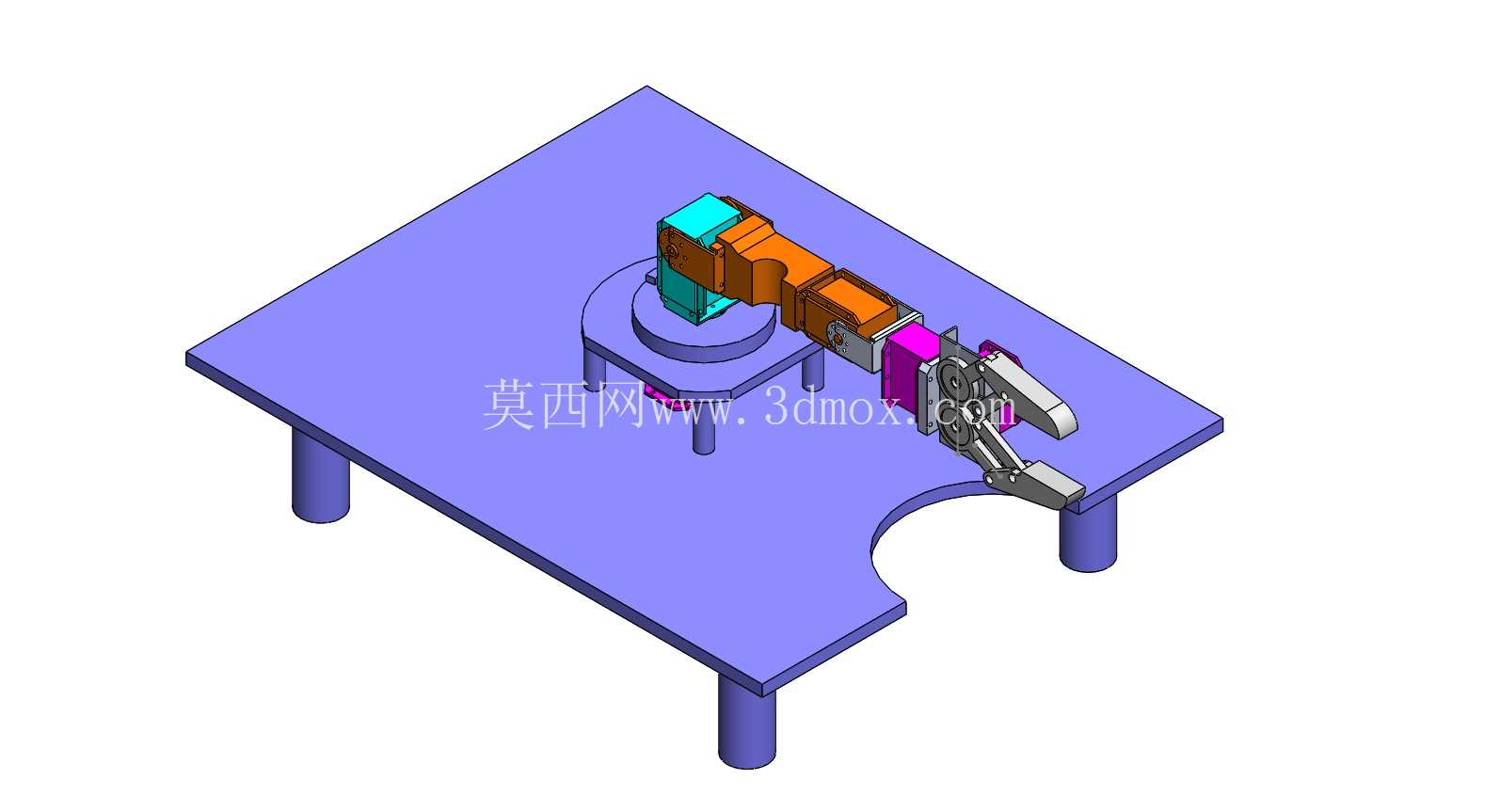
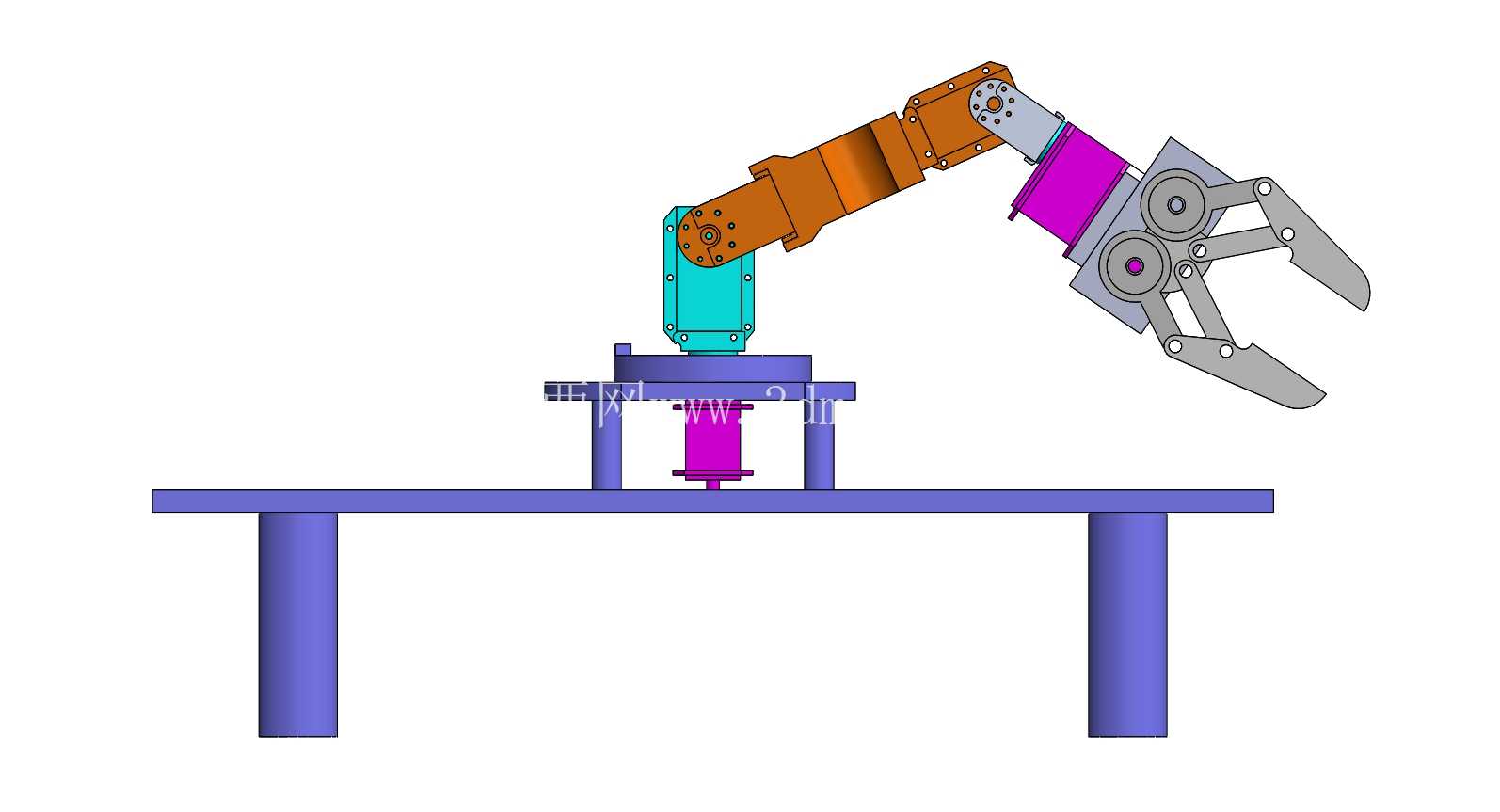
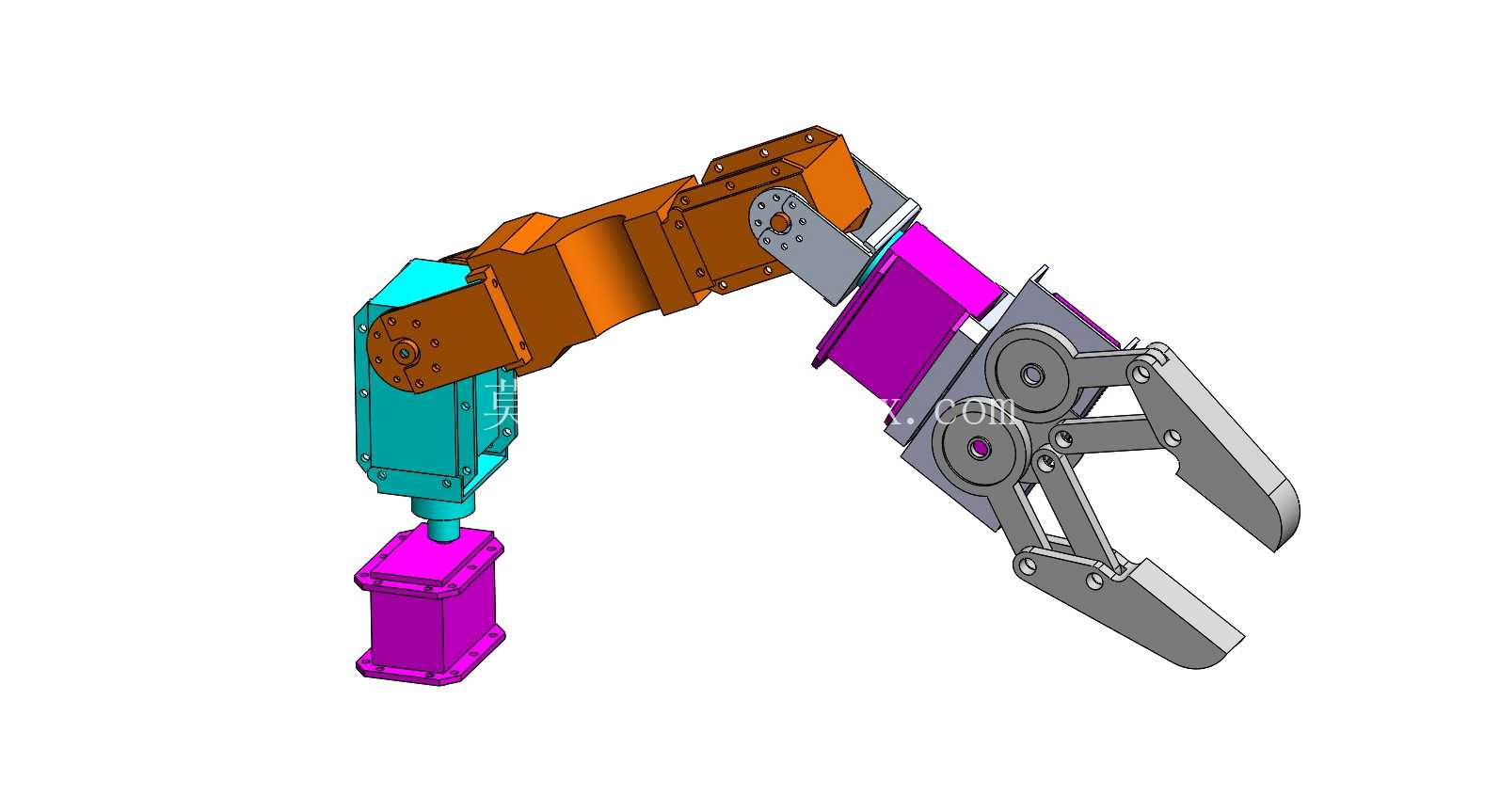
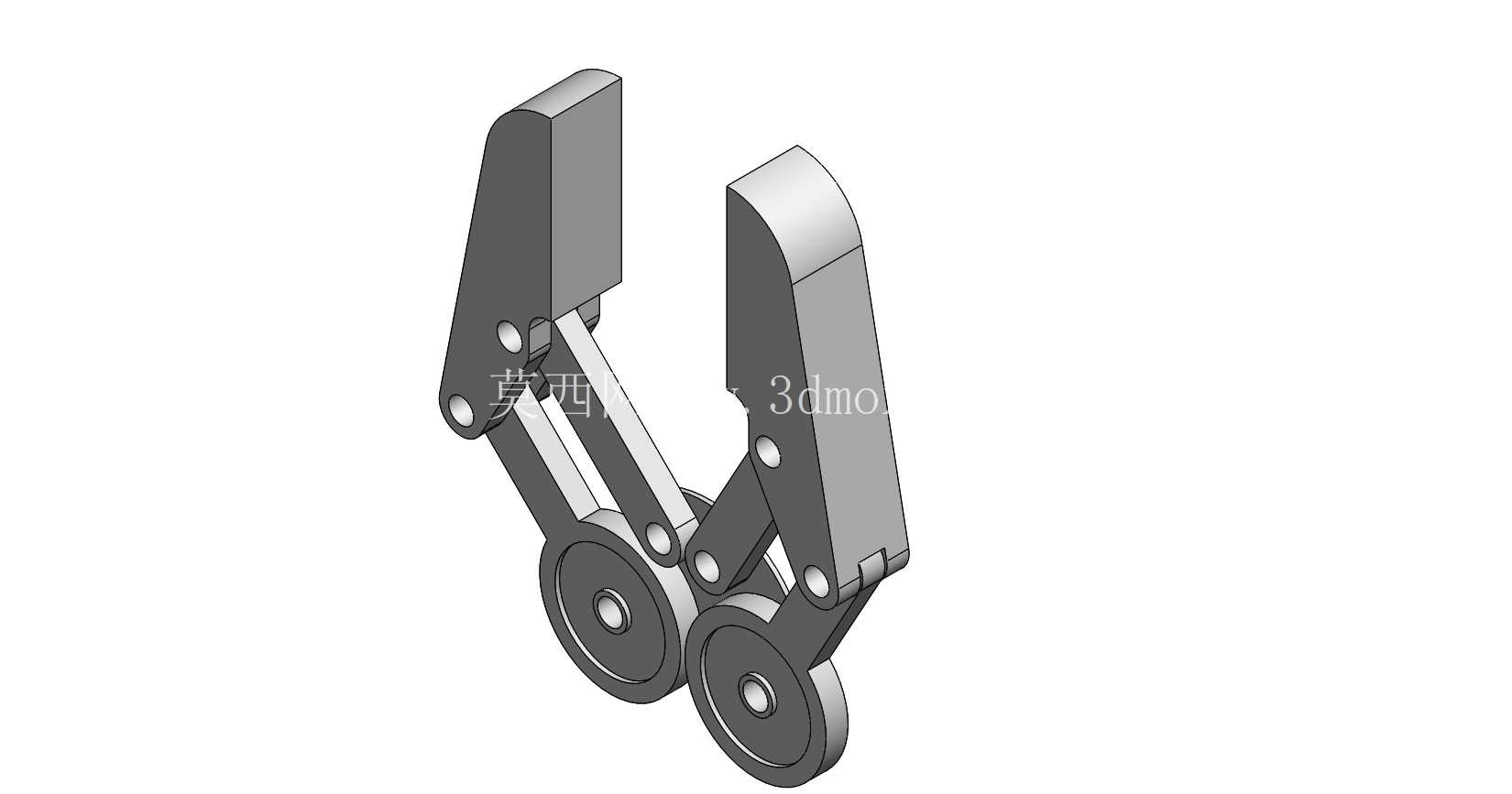
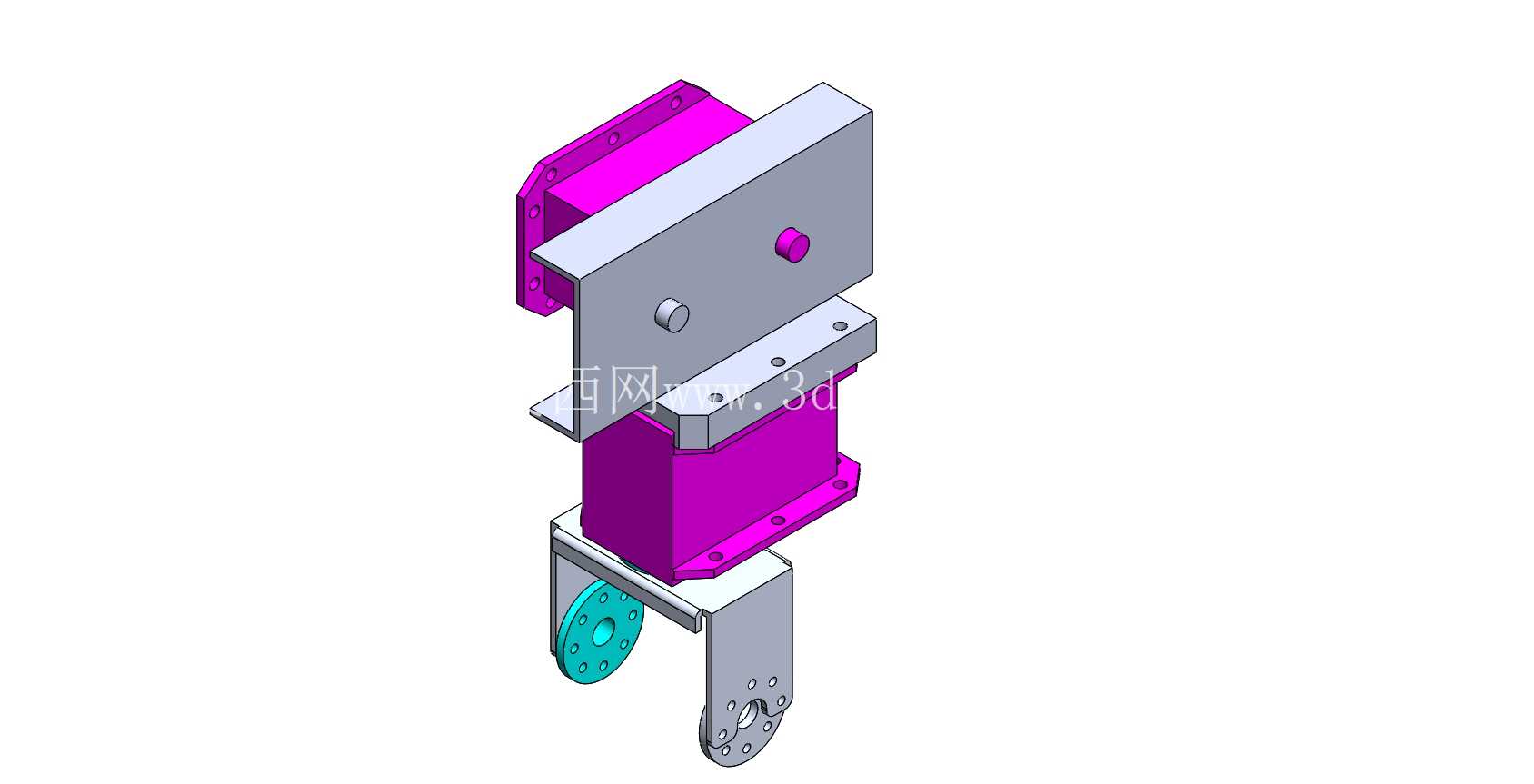


6 自由度关节式机械臂组件由 32 个机械细节部件组成。 该设计具有刚性底座、串行旋转关节和两指夹具末端执行器,可实现完整的空间定位和定向。 该模型的结构适合可制造性、执行器集成和运动仿真,使其适用于工业机器人概念、自动化研究和设计验证工作流程。预期应用工业机械臂概念开发自动化和制造系统设计运动学和运动研究CAD 装配参考和培训原型设计和增材制造
------分隔线----------------------------
- 上一篇:BODYKIT F1 空气动力学流动模拟
- 下一篇:齿轮箱外壳

说点什么吧
- 全部评论(0)

还没有评论,快来抢沙发吧!
- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS,Rendering