六足动物




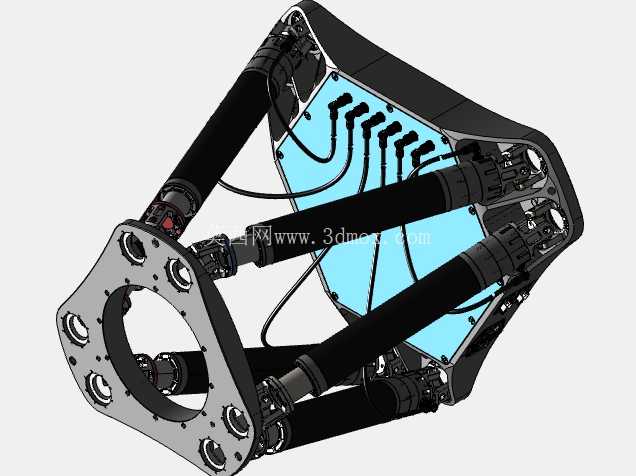
Stewart 平台的设计,这是我作为一系列精密线性执行器设计的一部分而开发的。Stewart 六足平台是一种并行机器人机构,它使用成对排列的六个独立控制的线性执行器将固定底座连接到可移动平台。 通过精确地伸展和缩回这六个腿,系统可以控制平台在所有六个自由度上的位置和方向。 这种设计提供了高刚度、精度和承载能力,使得六足位移台广泛应用于飞行模拟器、运动平台、精密加工、机器人和科学定位系统。


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,Rendering