PaTS-Wheel 顺应机制

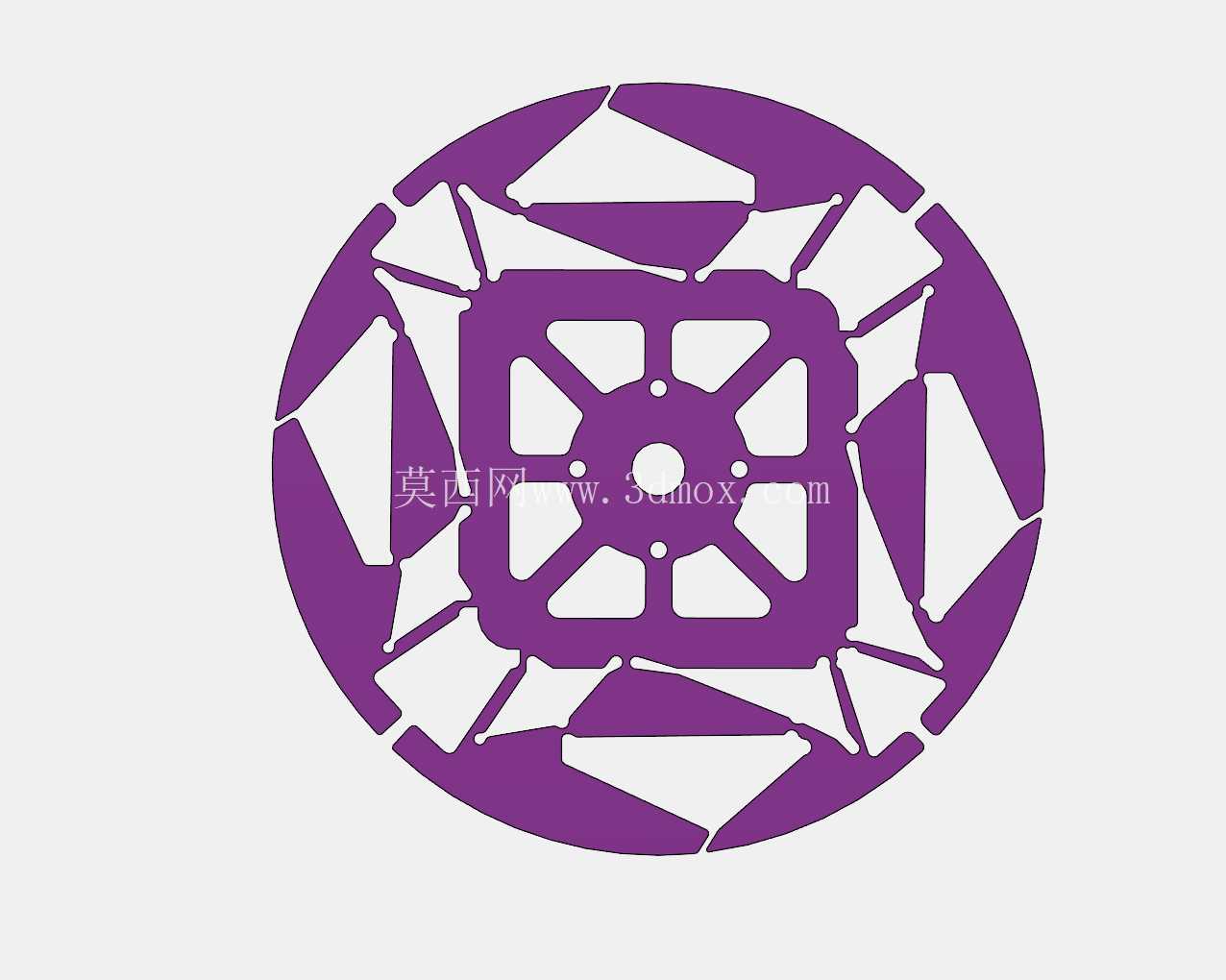
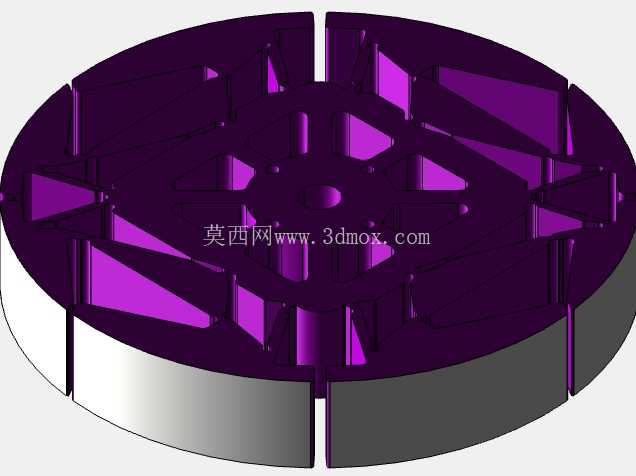
此 CAD 模型展示了 PaTS-Wheel,这是一种新颖的车轮,旨在在平坦和具有挑战性的非结构化地形上表现出色。 与传统的移动机器人轮子与障碍物作斗争不同,PaTS-Wheel 在遇到障碍物时会被动变形以形成钩子。 这种巧妙的转变完全由障碍物的几何形状引导,不需要传感器、执行器或复杂的控制器。PaTS-Wheel 保持了标准车轮在平坦地面上的能源效率和平稳行驶特性,并且具有可比的能耗和振动曲线。 然而,它真正的创新在于它能够跨越阶梯式的障碍并取得巨大的成功。 测试显示,在直径最大约 70% 的障碍物上,成功率达到 100%,明显优于同等标准轮子 (≈25%) 和轮子 (≈61%)。该设计有效地结合了轮子和腿式机器人的最佳功能,为在不同环境中导航提供了强大的自主解决方案。
标签:
------分隔线----------------------------
- 上一篇:无人机/无人机/ICA
- 下一篇:Bede BD-5 喷气式飞机

说点什么吧
- 全部评论(0)

还没有评论,快来抢沙发吧!
- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,Rendering