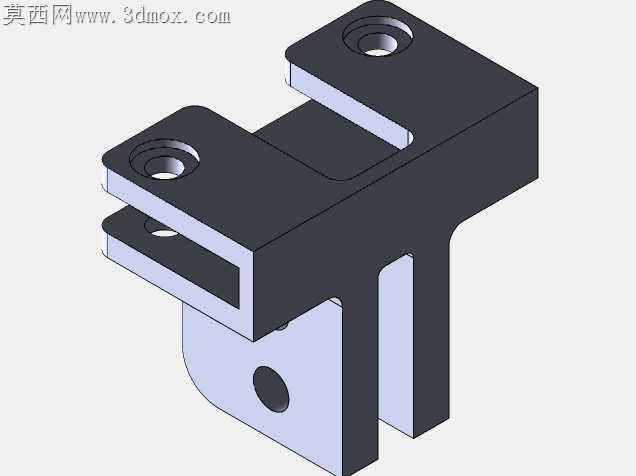
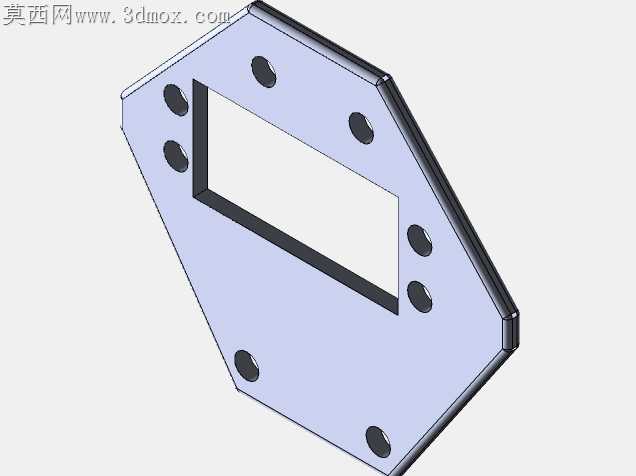
RoboG手爪-3D可打印
这个机器人抓取器已经在Ender 3上进行了3D打印,并且已经过各种尺寸物体的抓取测试。可自由改变齿轮臂和连杆的尺寸,以改变最大抓地力长度。测试带两个SM-S4315M伺服系统,2个自由度


- 模型大小 :2.13 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS,Rendering,SOLIDWORKS




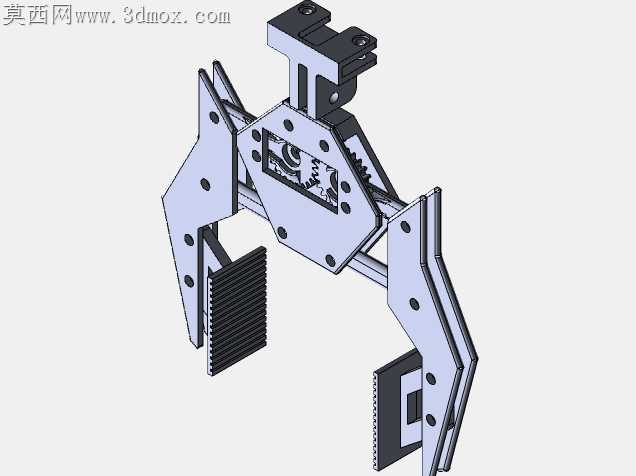
这个机器人抓取器已经在Ender 3上进行了3D打印,并且已经过各种尺寸物体的抓取测试。可自由改变齿轮臂和连杆的尺寸,以改变最大抓地力长度。测试带两个SM-S4315M伺服系统,2个自由度