Primo机器人

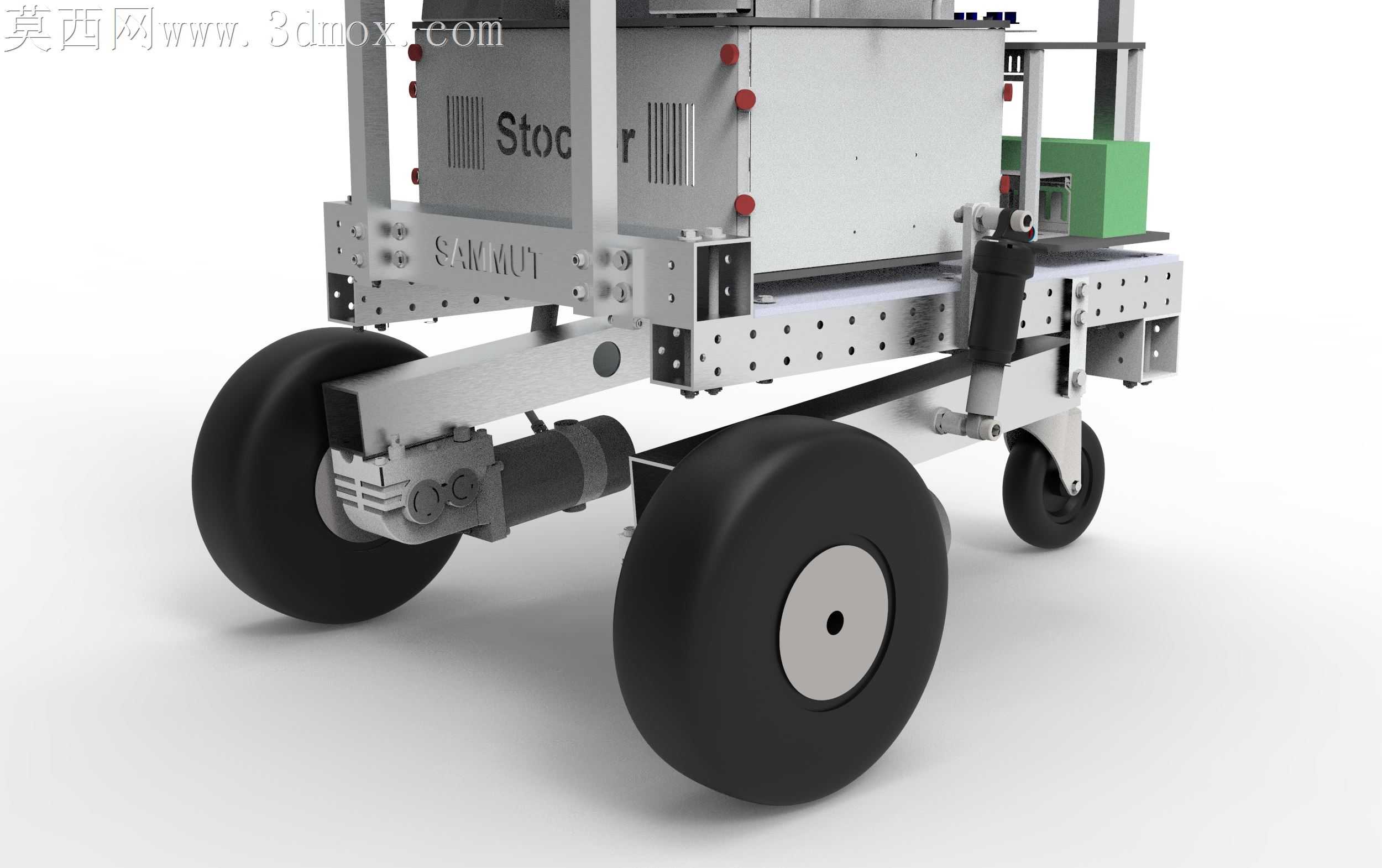





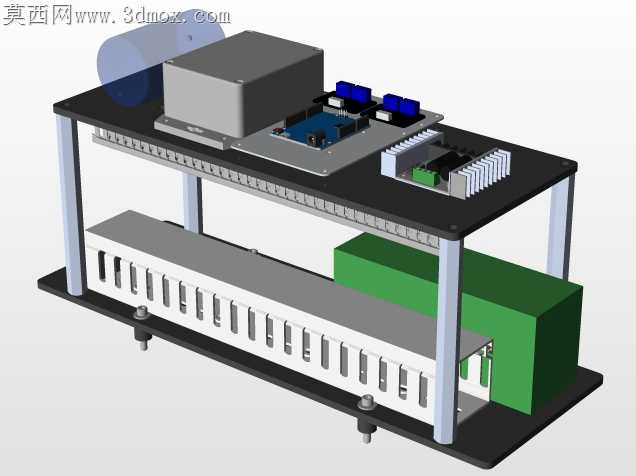
Primo是一个街头机器人,通过使用4个立体摄像机探测障碍物,能够自主移动。它是在差速驱动下使用轮椅电机建造的,并使用ROS和许多其他软件包进行编程。它的动力来自于一个6s的LiPo包,里面有一个结实的i7和一个GTX1080。点击此处查看更多信息:https://www.paulsammut.com/doku.php/primo_robotand网站这里有一段演示视频:
标签:


- 模型大小 :106.5 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS,Rendering























![窗户\u0026滑动门把手[Rhino]](https://static.3dmox.com/picture/pt65/2024/202411271141333054.jpg)