��е�ּг�����ĩ��ִ����



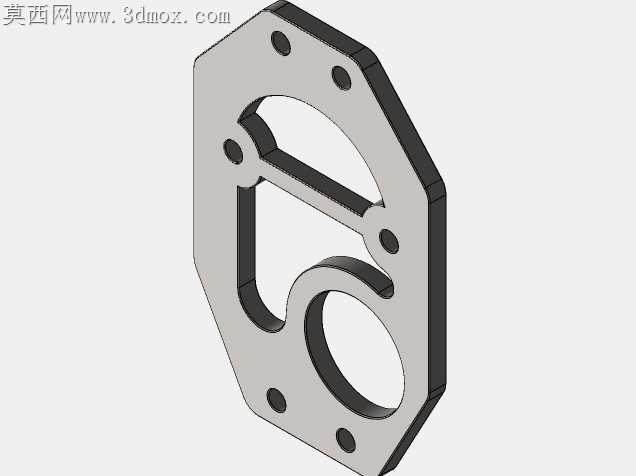
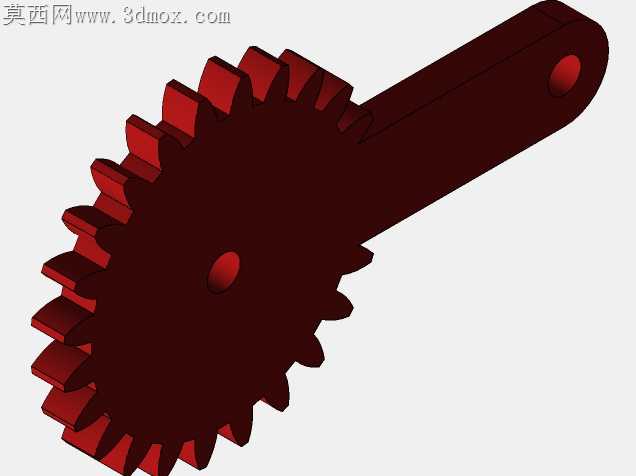
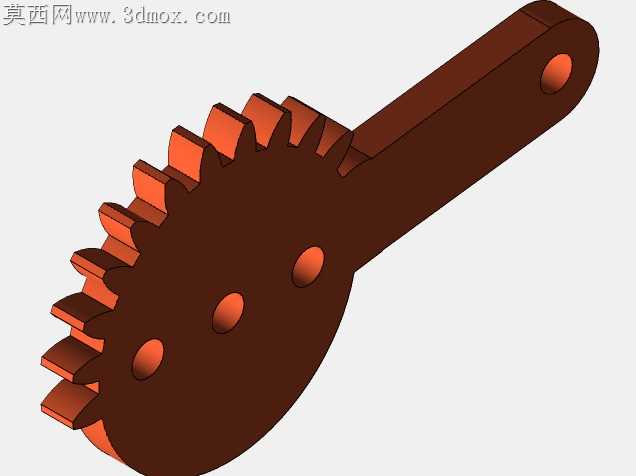

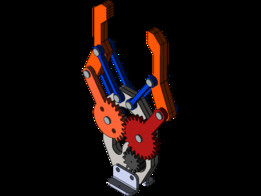
�ڻ�����ѧ�У�ĩ��ִ�����ǻ�е��ĩ�˵�װ�ã���������뻷����������װ�õ�ȷ������ȡ���ڻ����ˡ���ĩ��ִ������ָ�����˵����һ�����ڣ���ĩ�ˣ�������Դ�ڻ����˵�ϵ�л�е�֡�������˵��ϣ����߱����ӡ��Ӹ��㷺�������Ͻ���ĩ��ִ�������Կ����ǻ������빤������������һ���֡��Ⲣ����ָ�ƶ������˵����ӻ���˻����˵Ľţ�����Ҳ���ǻ����˵�ĩ��ִ���������ǻ����˵�һ���ֻ����ԡ�����ЧӦ�������ɼо���ɡ����ᵽ������ץȡʱ�����������͵Ļ�����ץȡ���������У���Ӱ�����Cͨ��ֱ��ײ������������Cʵ�ʴ����������롢����루���ڷ�֯Ʒ�������磬�������������������ķ�ʽ���Ӵ��������壬���������ᣩ�����ǻ��ڲ�ͬ������Ч��������ȷ���г����ͱ��гֶ���֮����ȶ�ץȡ��[2]��ҵ�г��������ǻ�е�ģ��ڹ�ҵ����Ϊ�㷺����Ҳ���Ի����������������ձ��͵�����������������������ǽ�����Ĵ�������Ŭ���г������üг����Ͳ����������IJ���֮����������Ӷ�ʹ�г����Ͳ��������������Ŭ��ԭ��������Ŭ���г�����һ�ַǽӴ�ʽ�г����������屣���ڼг��������������ж�����ֱ֮�ӽӴ�����Ŭ���г����ѱ�Ӧ���ڹ����ش�������Ƭ�����Լ���֯��Ƥ����ҵ������ԭ���ں�۳߶ȣ�����ߴ���ڵ���5���ף���ʹ�ý��٣����ڹ�ȥʮ���У��������۴�������չʾ����Ȥ��Ӧ�á������е�һЩ������չ����ԭ���������õ�����ԭ���У����ھ����ɣ������»������ľ���г����ͷ����߶�˹�г���������Һ����ʵ�ëϸ�ܼг����͵��¼г������Լ��������г����ͼ���г������ַǽӴ�ץȡԭ��������г������ڼг�����ͨ���ɼг�����������IJ���֮��ĵ�ɲ�������������������߶�˹�г������ڼг������Ӻ��������֮���ԭ���������������ĵ�����������Ϊ���磩��ëϸ�ܼг������üг��������֮���Һ��������ı���������ʹ������С������ץȡ�����¼г�����������Һ�壬�ɴ˲����ı���֤������ʹ������������������һԭ��Ҳ����ʳƷ������֯��ץȡ������Ϊ���ӵ��ǻ��ڳ������ļг���������ѹ��פ�����������������������ijһˮƽ�����������Ӽ�����ˮƽ�����ݶ��͵�Ȧ�����У�Ҳ�ں��ˮƽ����̫���ܵ�ػ��Ƭ�����У����Լ������ܹ���ס���ƶ���ѹ���ļ���ԴҺ���������е�С���֣���Ҫ��ϸ����������г���Ҳ����Ϊ��������һ���������͵�Ħ��/ǯ�ڼг�������г��������DZ���Ϊ����г���������Ħ������״�պ���Ϊ����е�г����������Ļ�е�г��������֣��������������ָ�����������ߵ�ĩ��ִ�����ж�����;������������н��е㺸������Ҫ��������Ե�����½������ᣬ�Լ��ڹ���������������Σ�յ�����½���������;����ƻ�������ר��Ϊ��Ŀ�������ĩ��ִ����

- ȫ�����ۣ�0��

- ģ�ʹ�С ��4.89 MB
- �� �� ��5Ī����
- ���ش��� ��
- �����ļ� ��Other,SOLIDWORKS