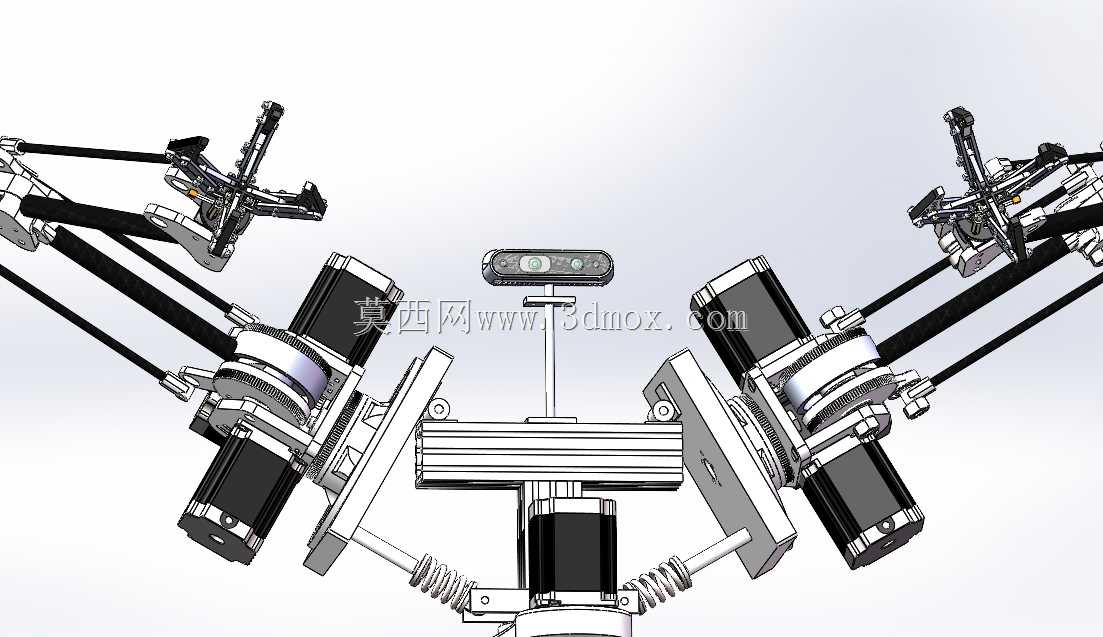
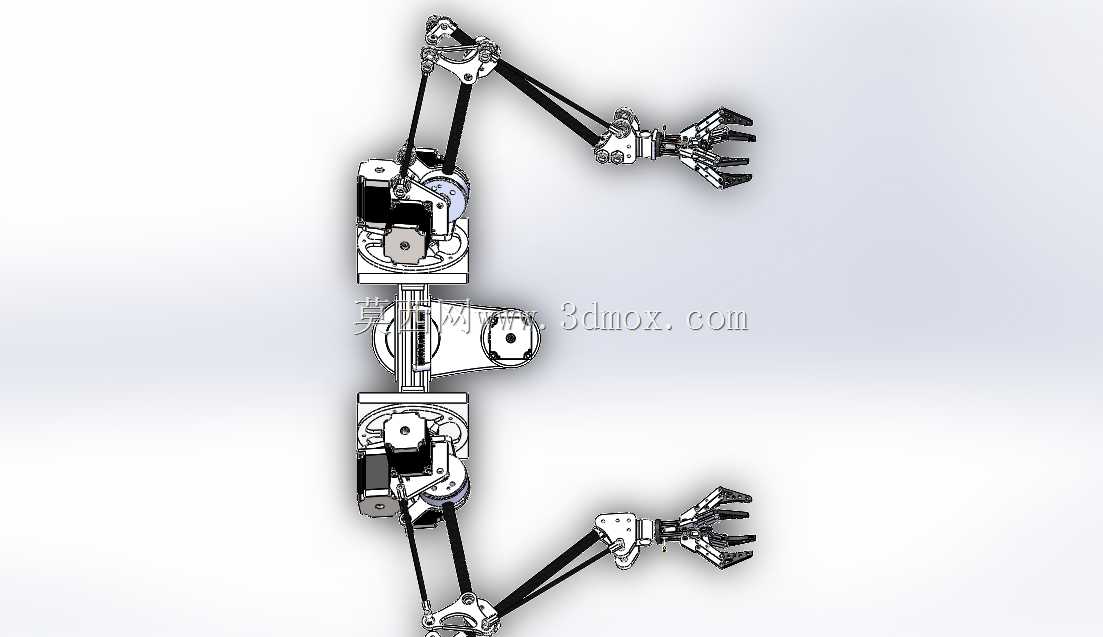
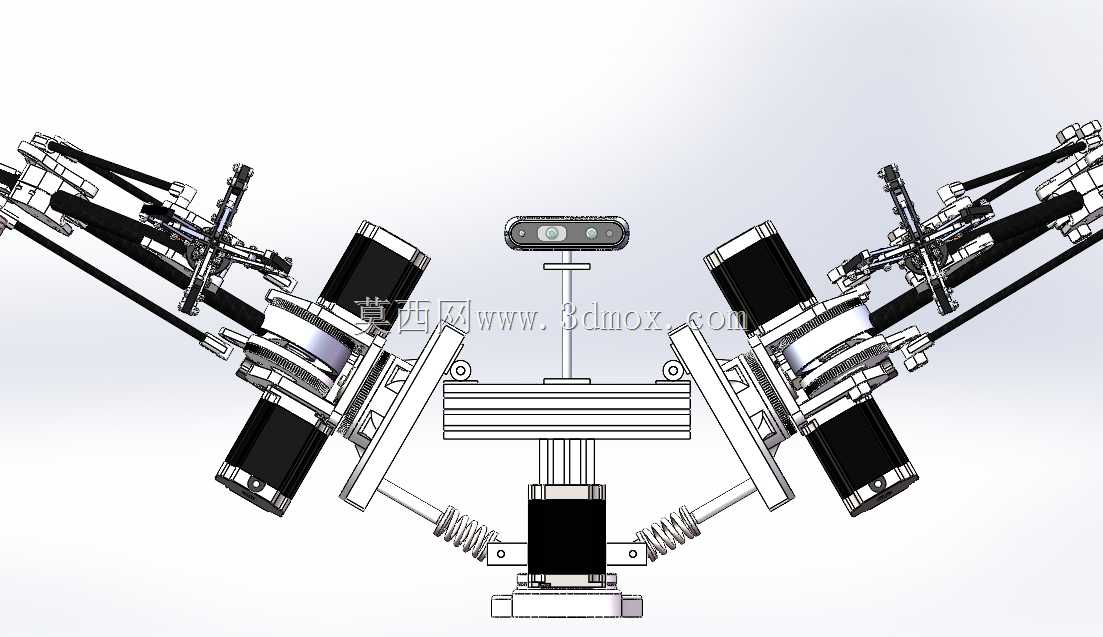
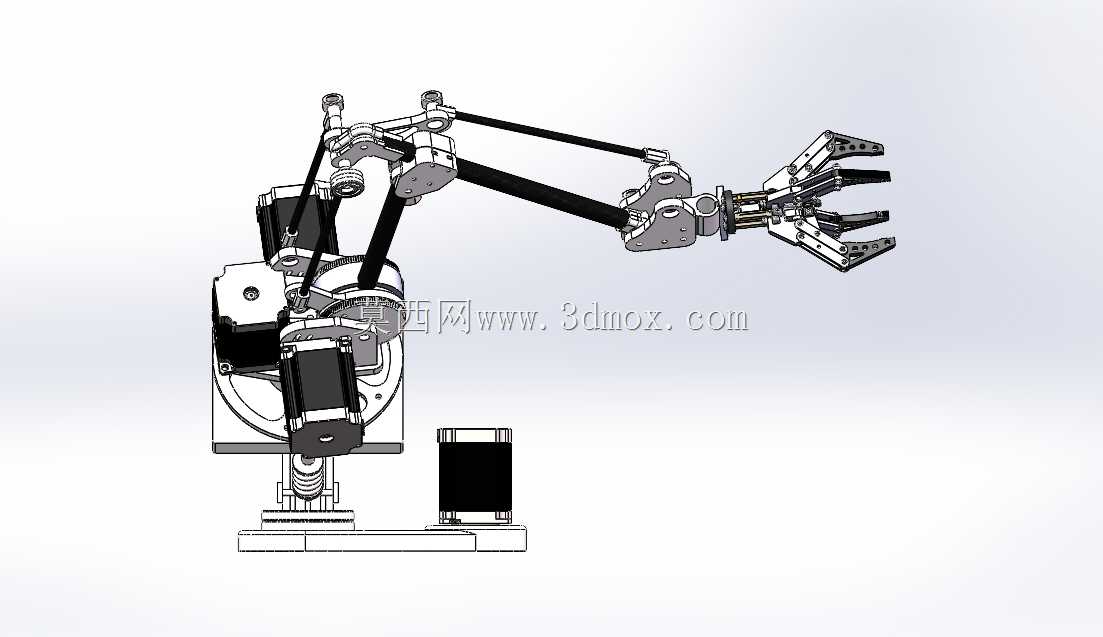
机器人双臂(2X4_-DoF+1DoF)
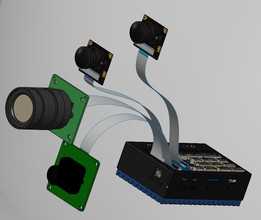
2、四自由度知名机器人手臂关节一起放在减震板上,一个轴旋转整个双臂,两臂立体crema定位在手臂框架的顶部。本次设计的目的是使DIY经济实惠的硬件软件用于仿人手臂机器人#ROS2&;#Gazebo已被用于仿真和控制


- 模型大小 :47.34 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS,Rendering



2、四自由度知名机器人手臂关节一起放在减震板上,一个轴旋转整个双臂,两臂立体crema定位在手臂框架的顶部。本次设计的目的是使DIY经济实惠的硬件软件用于仿人手臂机器人#ROS2&;#Gazebo已被用于仿真和控制