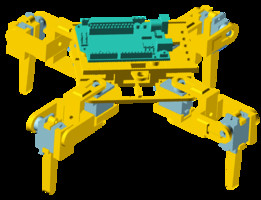
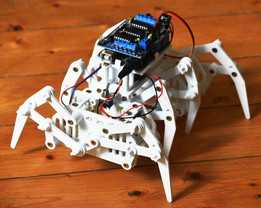
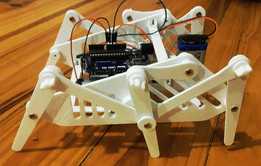
哥伦比亚CL-20六足机器人
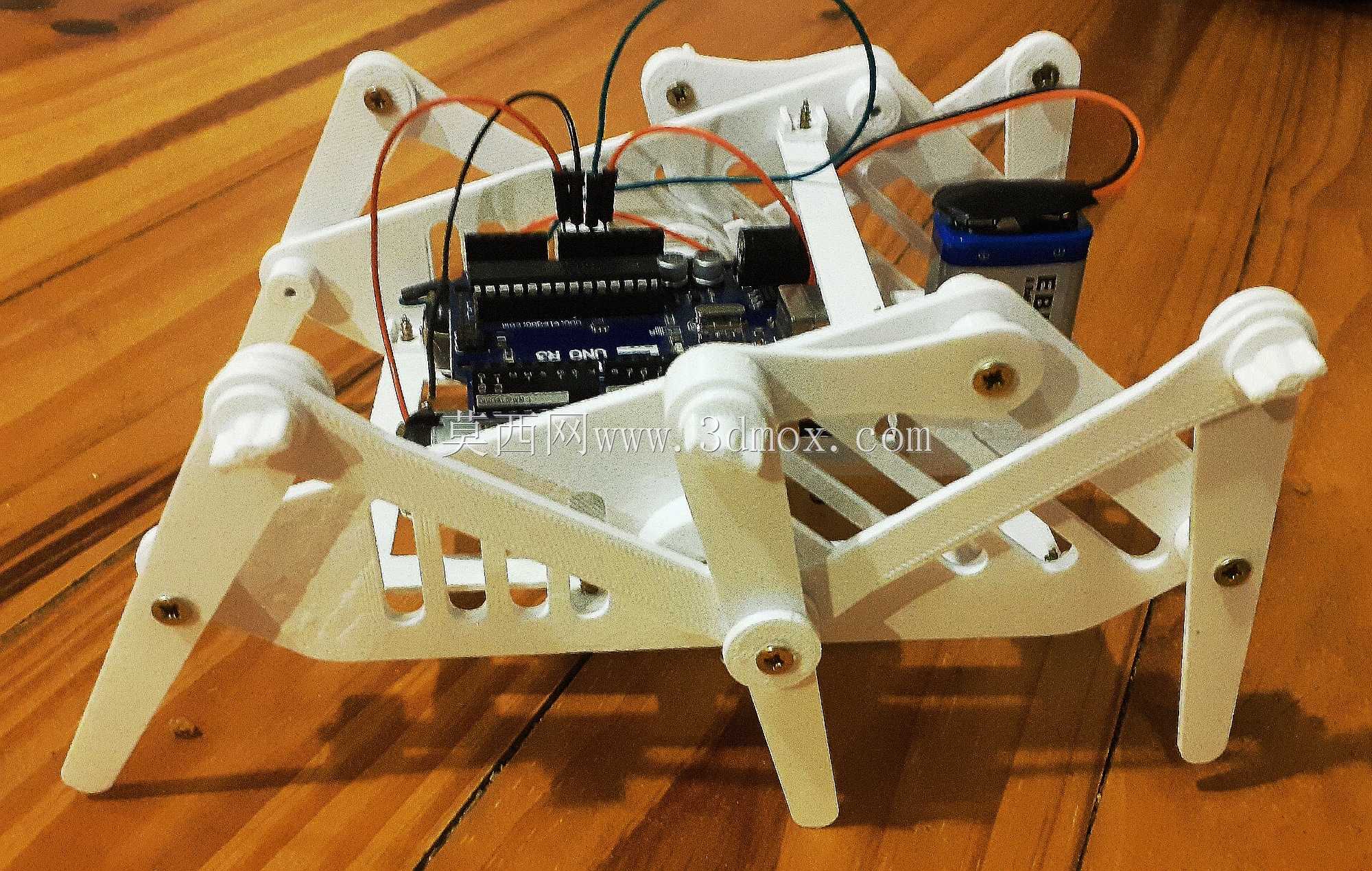
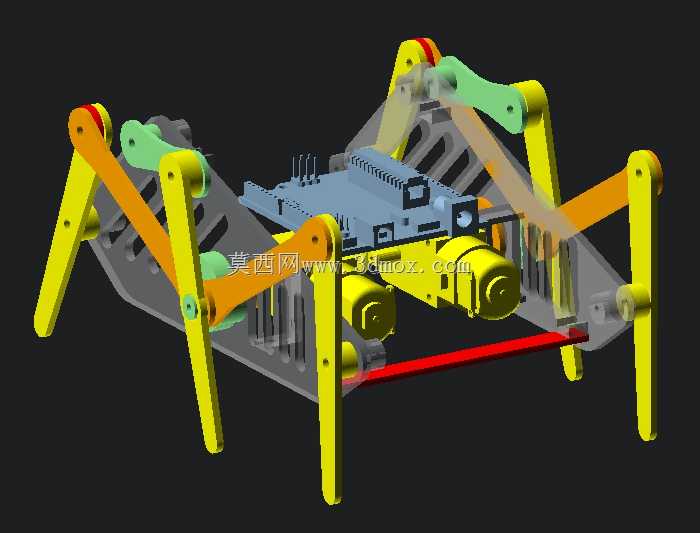
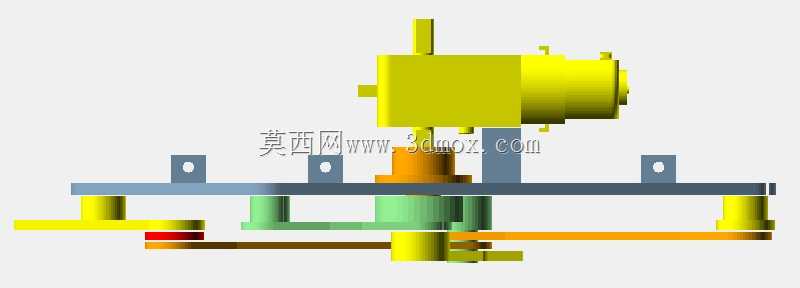




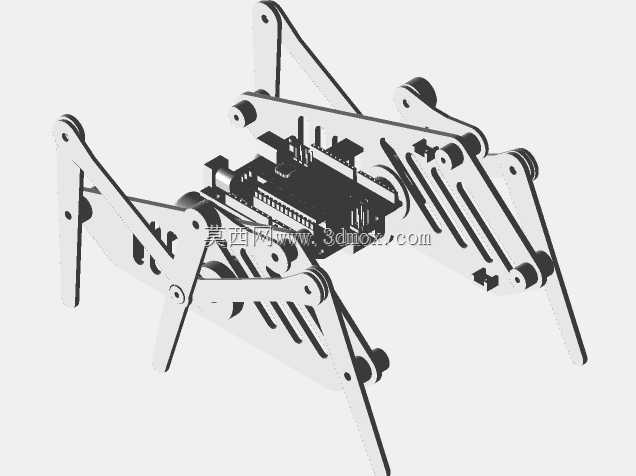


这个六足机器人的灵感来自于哥伦比亚一所高中的学生们开发的“哥伦比亚制造”项目。这是一个平面机构,设计用于模拟有腿动物的外观并替换车轮。该机构由六条腿组成,推动机器人前进。机动性由两个电机保证,根据旋转方向,允许其向前、向后或转动(向右或向左)。通过红外遥控进行远程控制。逻辑由Arduino UNO董事会管理。这些元素使用OpenSCAD软件建模,然后在Creality CR-20三维打印机上打印PLA.http://机器人-网址:oui.org/site/main.php?发现=200325-CL-6-hexapod-01


- 模型大小 :16.36 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STL,STL,STL,STL,STL,STL,STL,Rendering,STL,STL,STL,STL,STL,STL,Rendering