四足机器人曲波











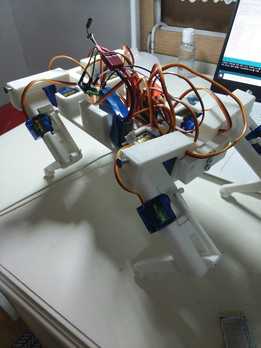
这是一个类似哺乳动物的四足机器人,灵感来自波士顿动力公司的spot(前spotmini)。和其他许多人一样,我对这个机器人感到高兴,于是决定做一个便宜的仿狗微型机器人。我已经计算出了所有的运动学,许多运动,如行走或旋转,都是用vpython计算和模拟的。电子元件包括arduino nano、PCA9685伺服驱动器、12个sg90伺服、一个5V 5A伺服调节器和一个5V 3A电子调节器。我本来打算自己打印设计,但后来由于covid-19的原因我不能上学,所以我不能使用那里的3d打印机。我选择了另一种方法,将stl.s文件发送到一个3d打印设备上,这消耗了大量的时间(当然还有金钱),这就是为什么我没有机会修复设计中的错误。对此我深表歉意,但问题可以通过熔化或切割一些零件来解决。我会张贴一个关于这包括代码和固定的stl文件的说明后,我做了一切,但我仍然有很多工作要做。这包括安装IMU传感器和蓝牙。测试视频是在我切换到5A稳压器之前拍摄的,所以它动力不足,速度慢。尽管如此,我希望你喜欢我的设计
标签:


- 模型大小 :16.56 MB
- 消 耗 :5莫西点
- 下载次数 :
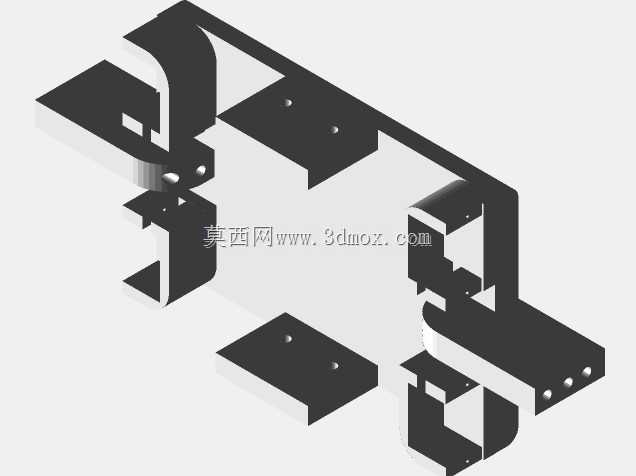
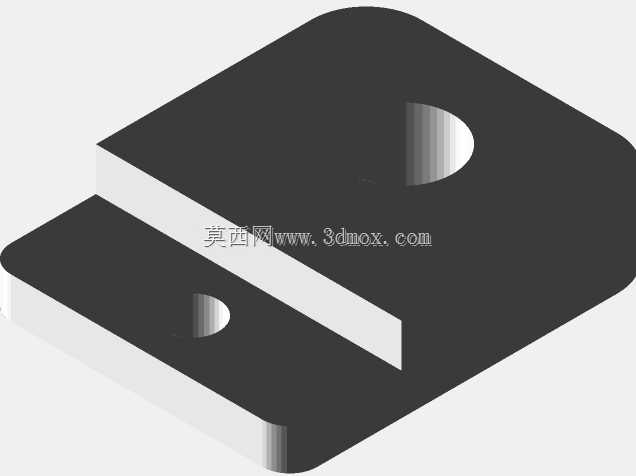
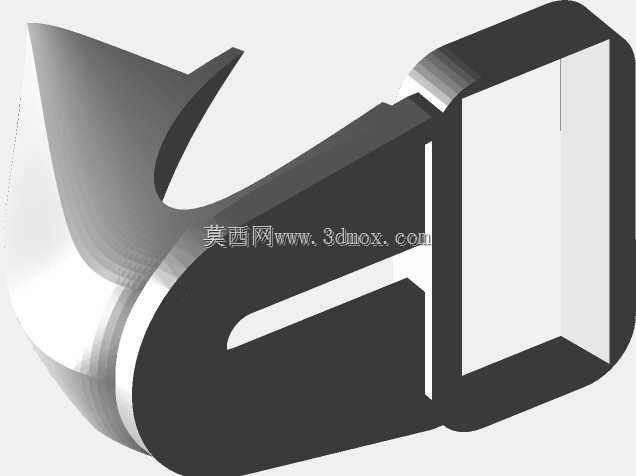
- 包含文件 :Fusion 360,Rendering,STL,STL,STL,STL,STL,STL,STL,Rendering,STL,STL,STL,STL,STL,STL,STL,Rendering