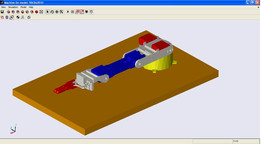
StewartЖҪМЁ

Stewart ЖҪМЁКЗТ»ЦЦАаРНөД°ьә¬БЛБщАвЦщРОЧч¶ҜЖчЈ¬іЈУГТәС№З§Ҫп¶ҘөДІўБӘ»ъЖчИЛЎЈХвР©ҙ«¶ҜЖчКЗЕд¶Ф°ІЧ°өД¶ФёГ»ъЦЖөД»щөШЈ¬ҝзөҪИэёц°ІЧ°өгФЪөЧ°еЙПЎЈФЪЖдЦРУРҝЙДЬЧФУЙөШФЭНЈөДЙнМеТЖ¶ҜБщЧФУЙ¶ИҝЙТФТЖ¶ҜЙиұё·ЕФЪ¶ҘІгөДЕМЧУЎЈХвР©¶јКЗИэёцПЯРФФЛ¶Ҝ xЎў yЎў z ЈЁәбПтЎў ЧЭПтәНҙ№ЦұЈ© әНИэёцРэЧӘҪЪҫаЈ¬№цЈ¬ј°Ж«әҪЎЈҙЛНвУГҙК"БщЦб"ЖҪМЁЎЈ
------·ЦёфПЯ----------------------------
- ЙПТ»ЖӘЈәЖӨҙшХЕҪфВЦ
- ПВТ»ЖӘЈәЕЕЖшManifold-Headers

ЛөөгКІГҙ°Й
- И«ІҝЖАВЫЈЁ0Ј©

»№Г»УРЖАВЫЈ¬ҝмАҙЗАЙі·ў°ЙЈЎ
- ДЈРНҙуРЎ Јә20.79 MB
- Пы әД Јә10ДӘОчөг
- ПВФШҙОКэ Јә
- °ьә¬ОДјю Јә