NovaBot-��ҵ��������Ƹ���

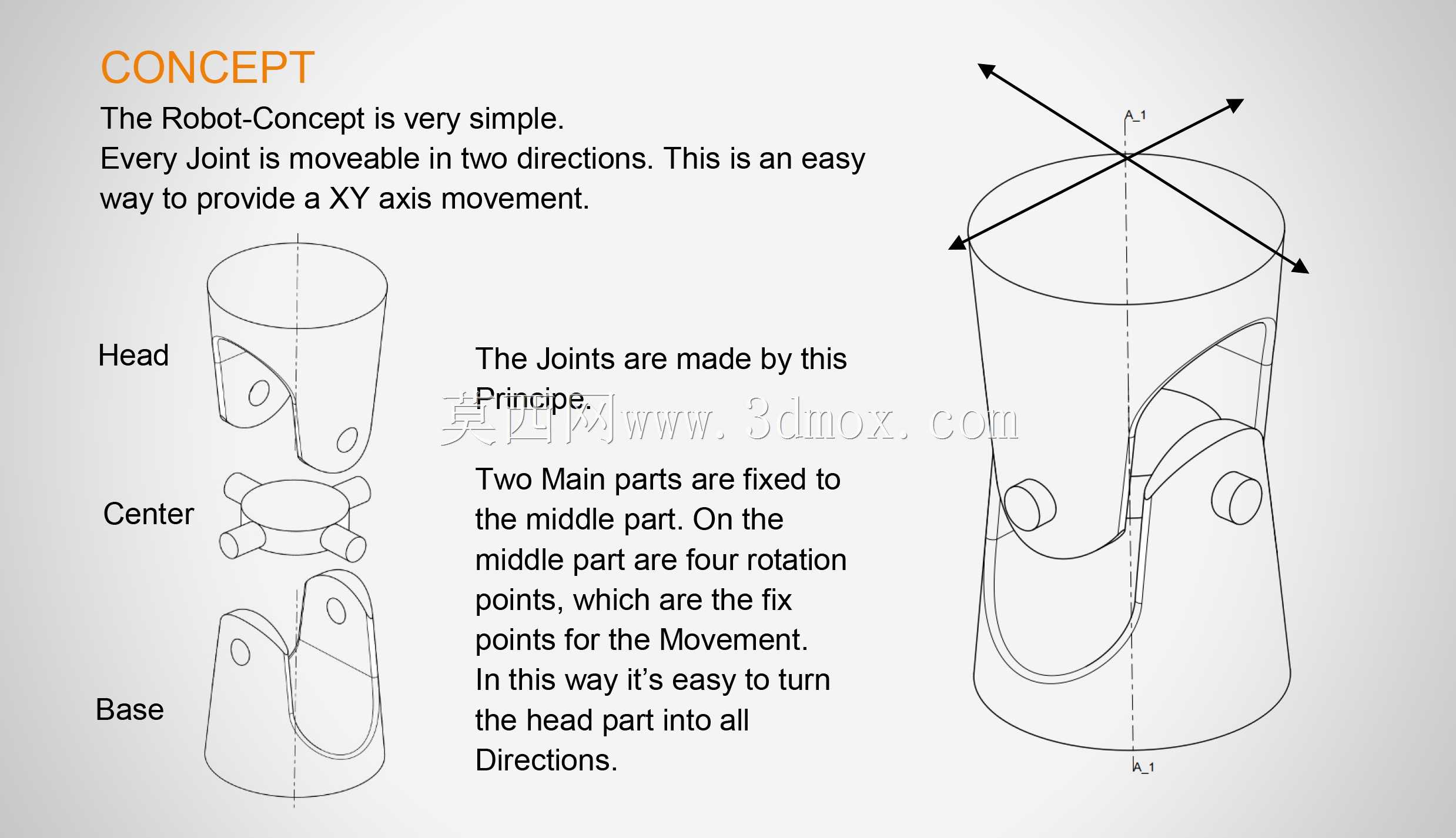
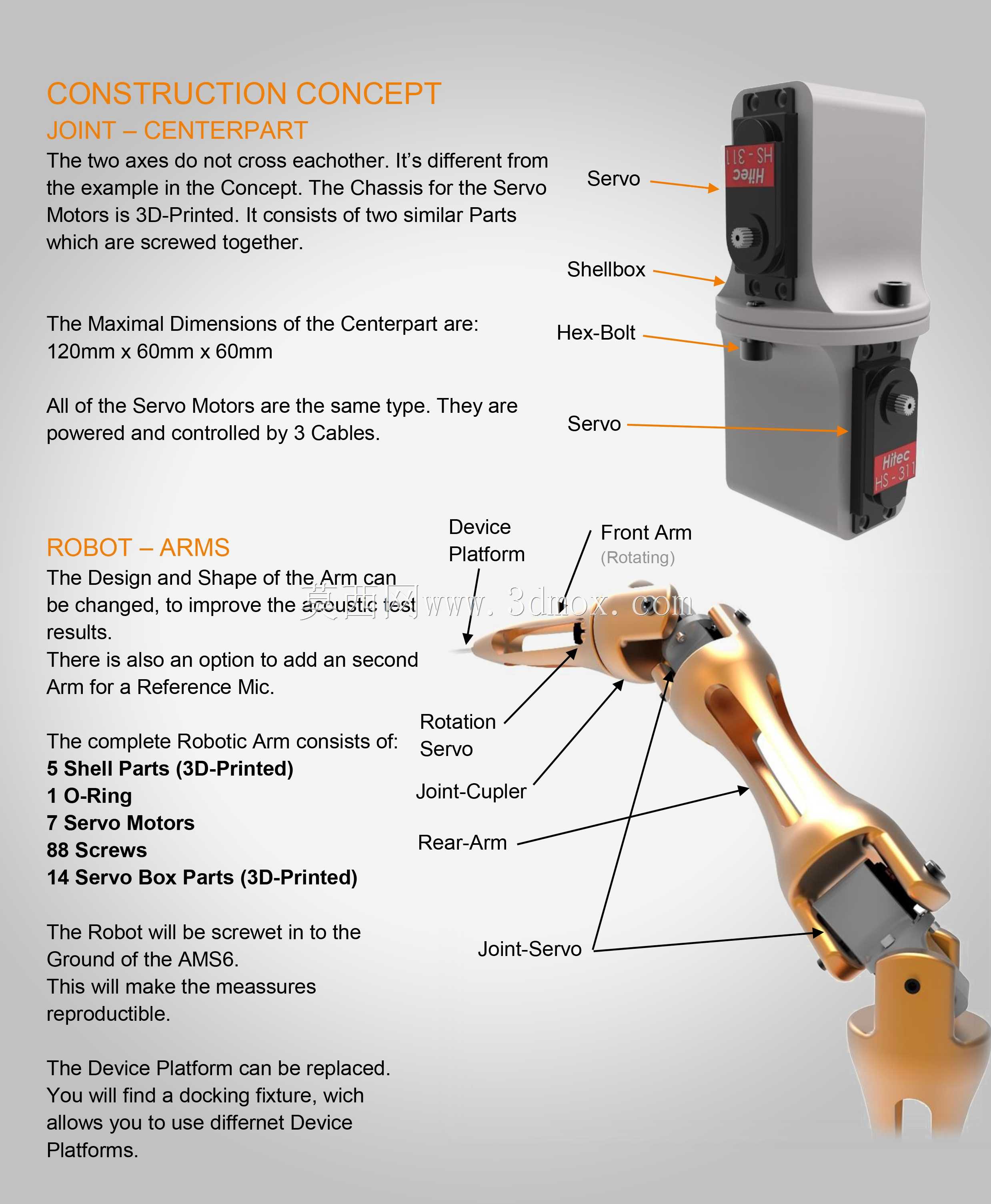







NovaBOT�����˵ĸ���dz���ÿ���ؽڶ������������������ƶ��������ṩXY��ļ����ƶ���2��Ҫ�������ǹ̶����м䲿�֡��м䲿�����ĸ���ת�㣬�������˶��Ĺ̶��㡣���������װ�ͷ�����ȫ��������Ҫ��ģ�ͺ�ͼƬ��ʹ�õ��ŷ����������̡�����������һ��ʵ�飬�������������ײ���ͷ�C���IJ���������档��������е����Ӳ�ͬ���ŷ�����ĵ�����3D��ӡ�ġ������������ƵIJ������һ��һ�����IJ��������ߴ�Ϊ��120mm x 60mm x 60mm���ŷ��������С�ߴ�Ϊͬһ�ͺš�������3������������Ϳ��Ƶ���.�����˻�е�������Ļ�е�۰�����5����������3D��ӡ��1��O��Ȧ7���ŷ����88���ݶ�14���ŷ��������3D��ӡ������е�۽�š����档�����ʹ�������Ŀɸ��Ƶ��豸ƽ̨���Ը�������ᷢ��һ���ԽӼоߣ���������ʹ�ò�ͬ���豸ƽ̨
------�ָ���----------------------------
- ��һƪ��Arduino Uno��
- ��һƪ������������

˵��ʲô��
- ȫ�����ۣ�0��

��û�����ۣ�������ɳ���ɣ�
- ģ�ʹ�С ��20.74 MB
- �� �� ��5Ī����
- ���ش��� ��
- �����ļ� ��STEP / IGES,Rendering