螺旋驱动六足动物六足机器人
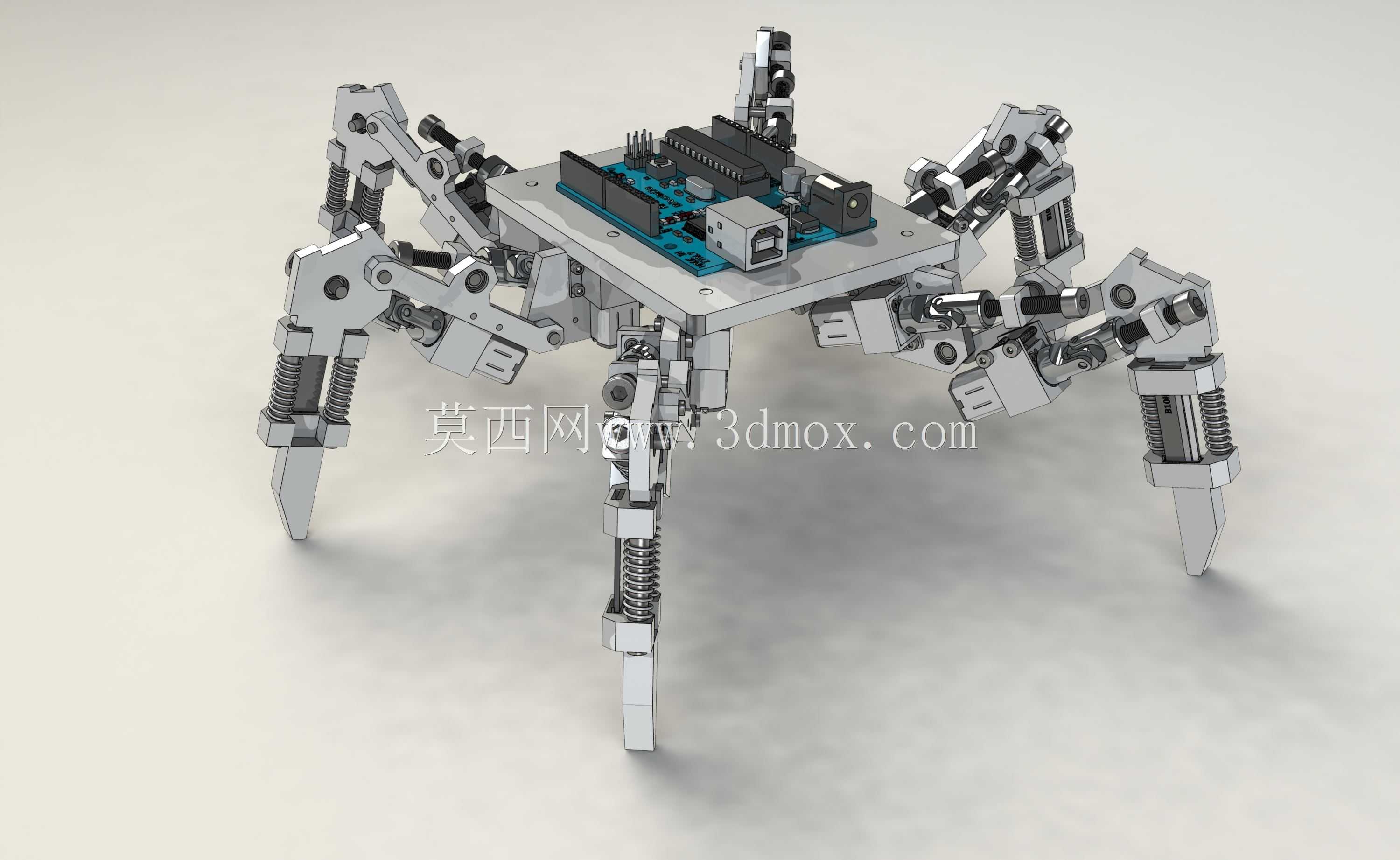


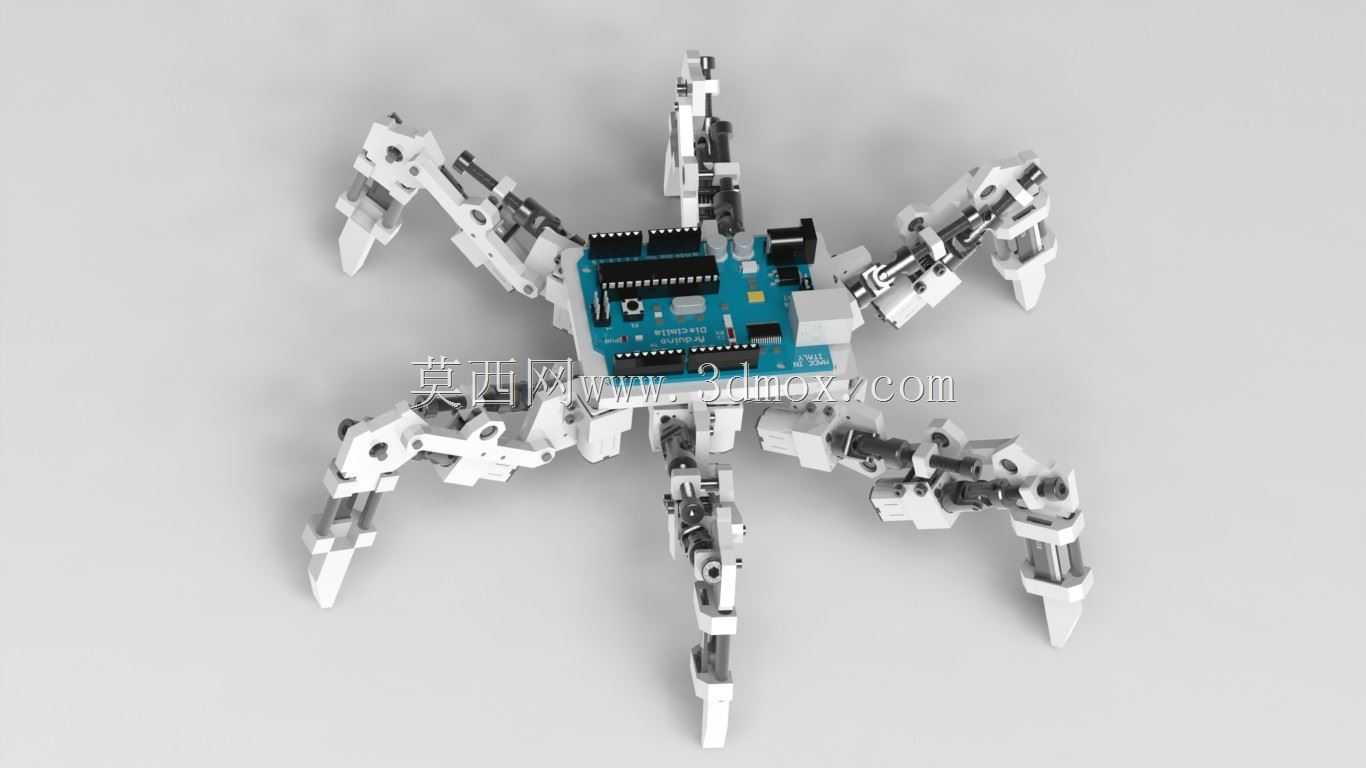


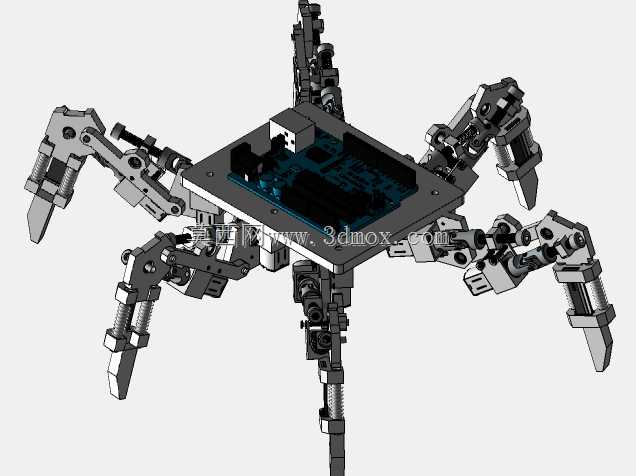
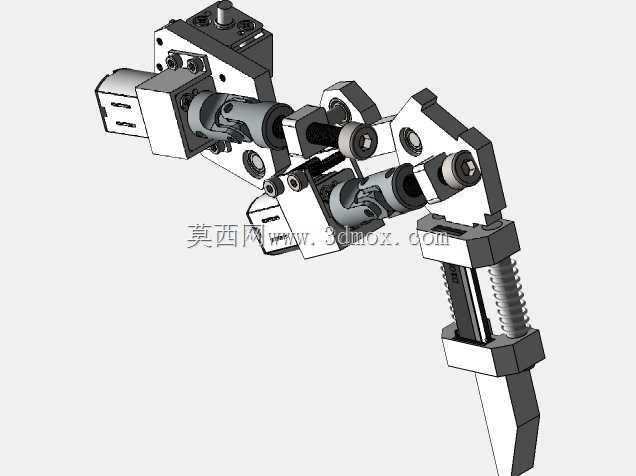











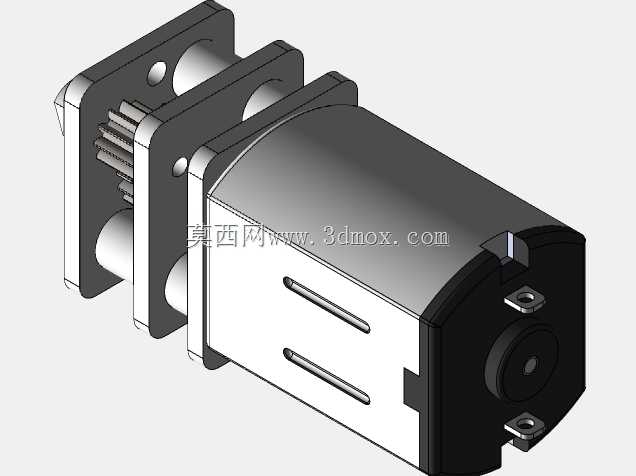







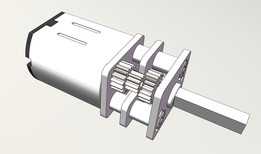
我在2012年建造了一个六足机器人。在建造了一个伺服驱动的六足机器人之后,我想尝试一些东西不一样。还有然后我想出了一个螺丝刀设计。为什么螺旋传动?第二,利用螺旋传动的自锁特性我在试写一篇关于这个六足动物设计的详细文章,并在我的博客上发表。==>;http://lichaoma.com/2016/02/13/screw-driven-hexapod-robot-design/你知道吗


- 模型大小 :33.15 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,Rendering,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,Rendering,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SO