A型架ALLGO



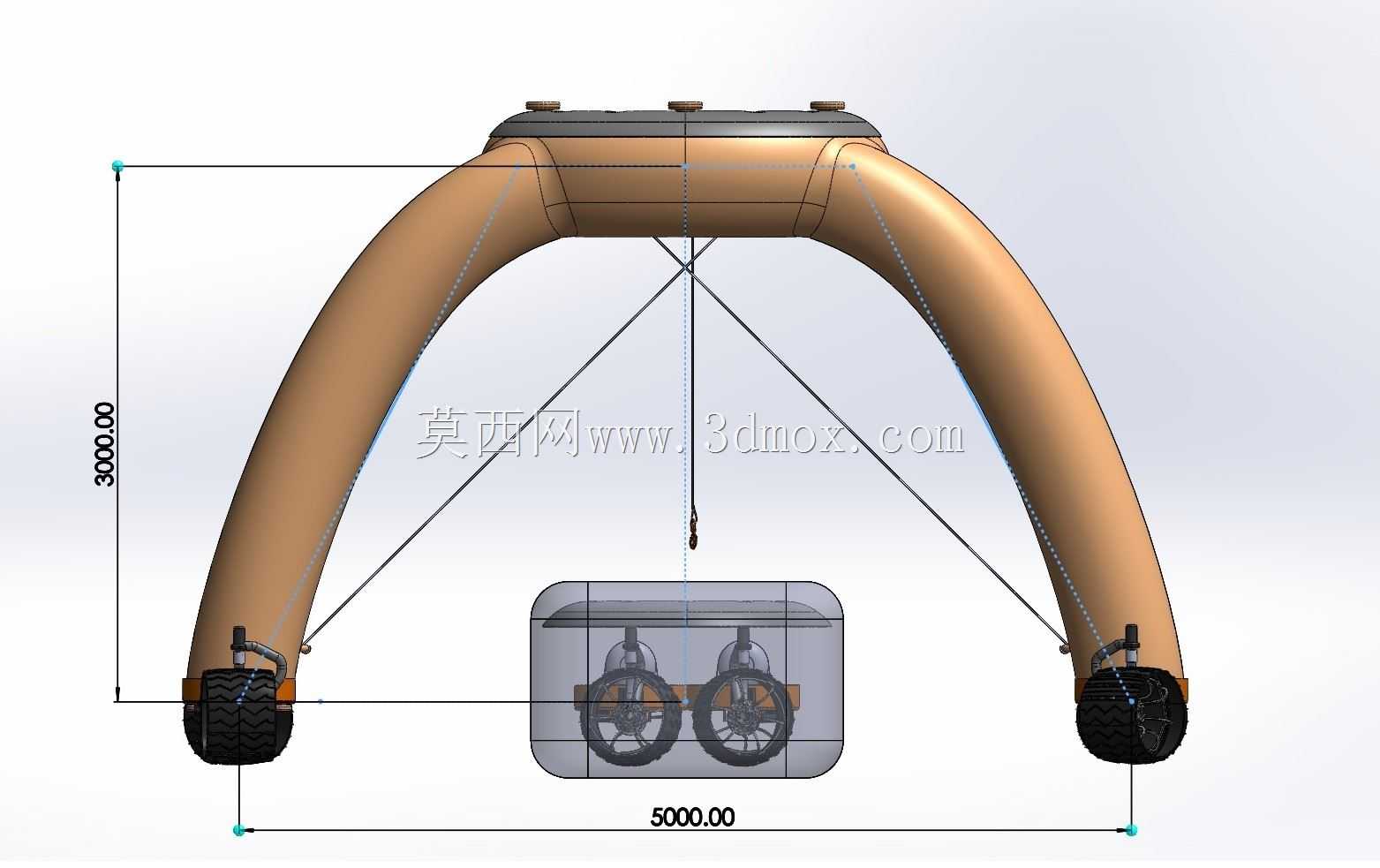

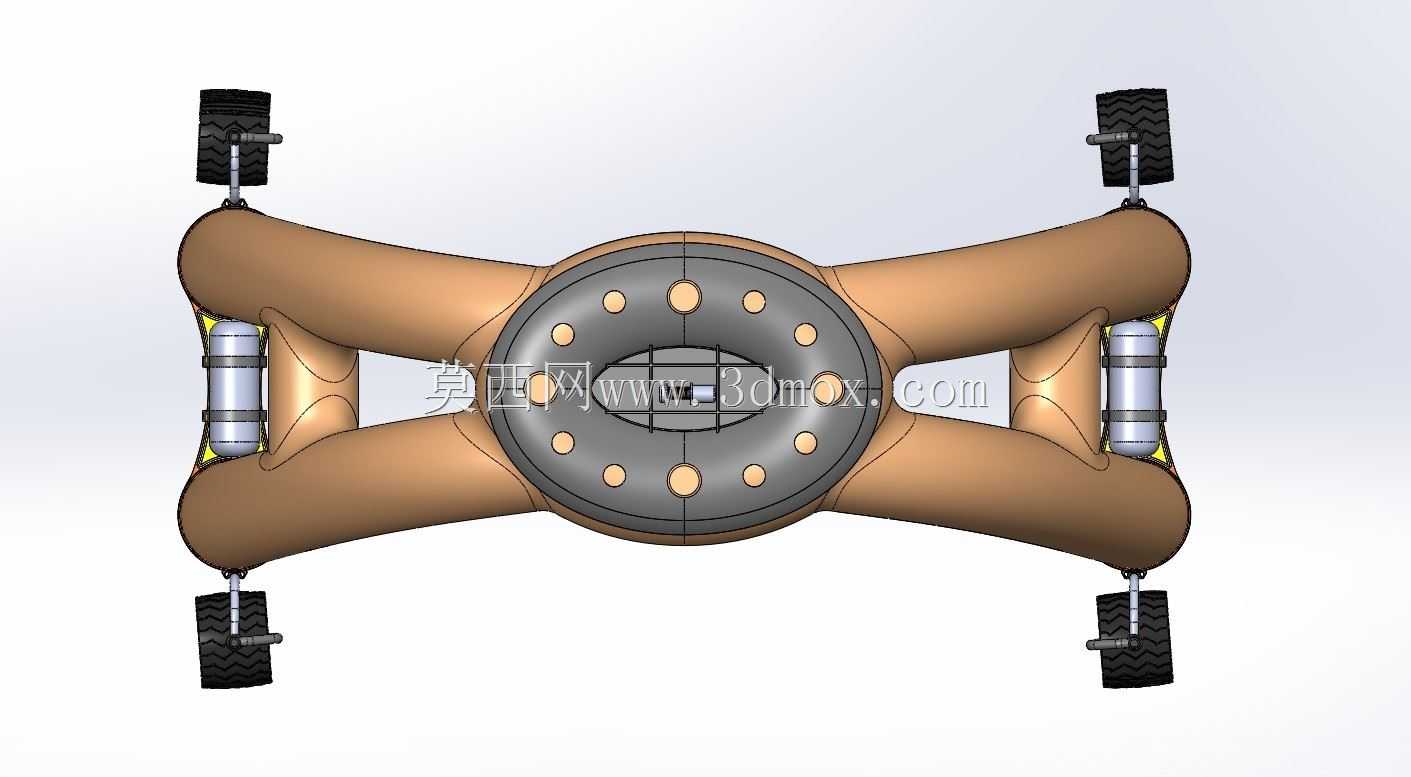
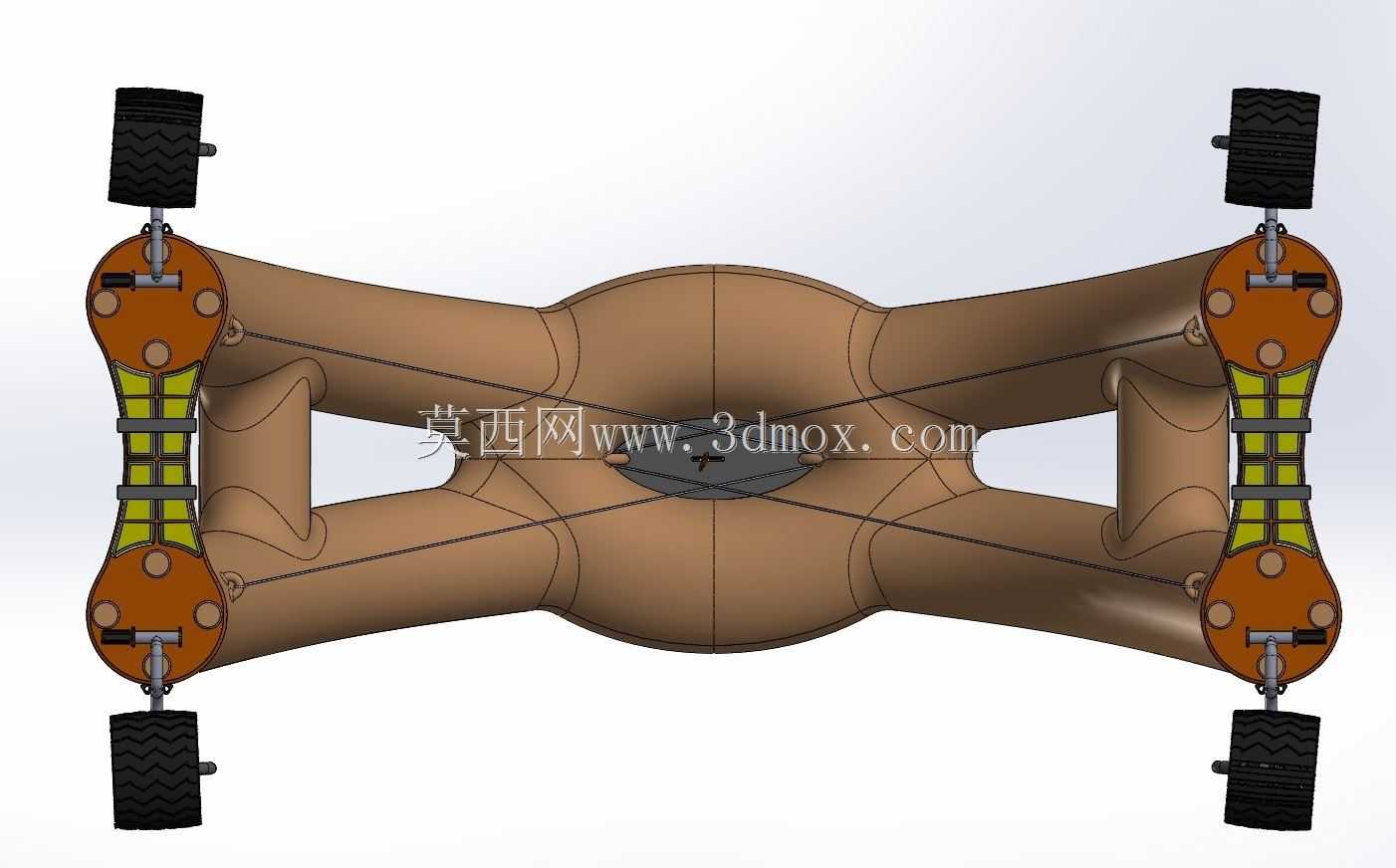
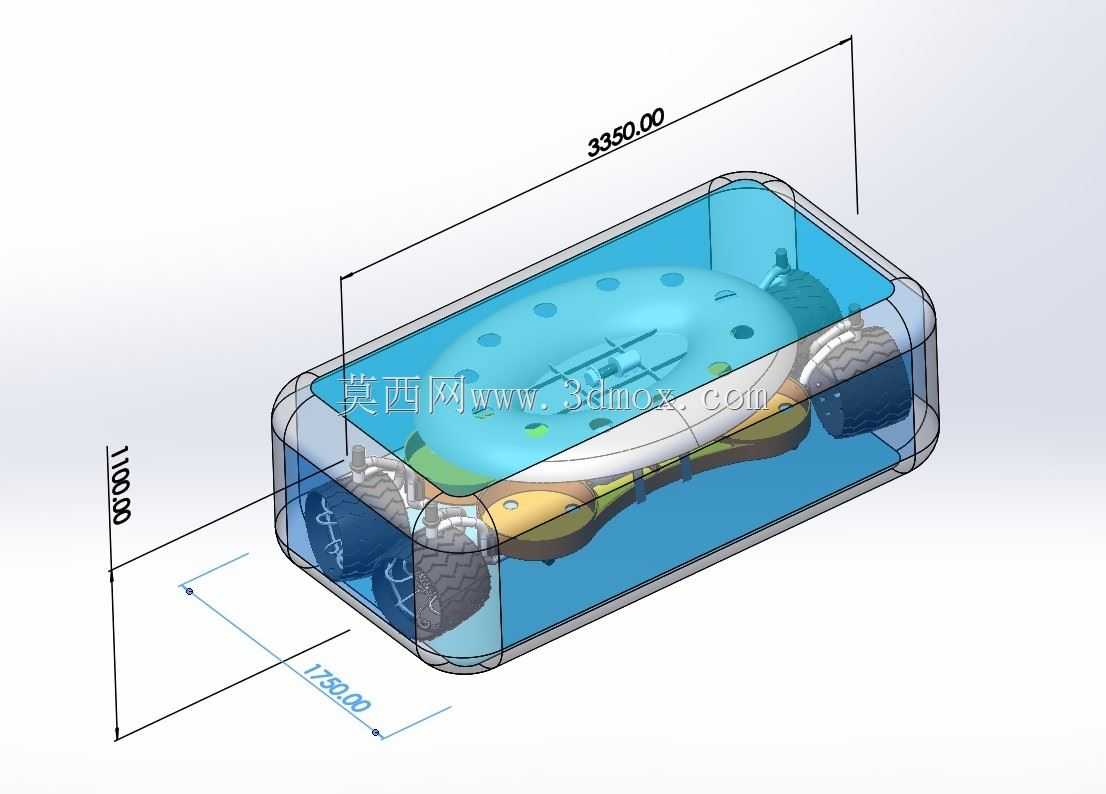
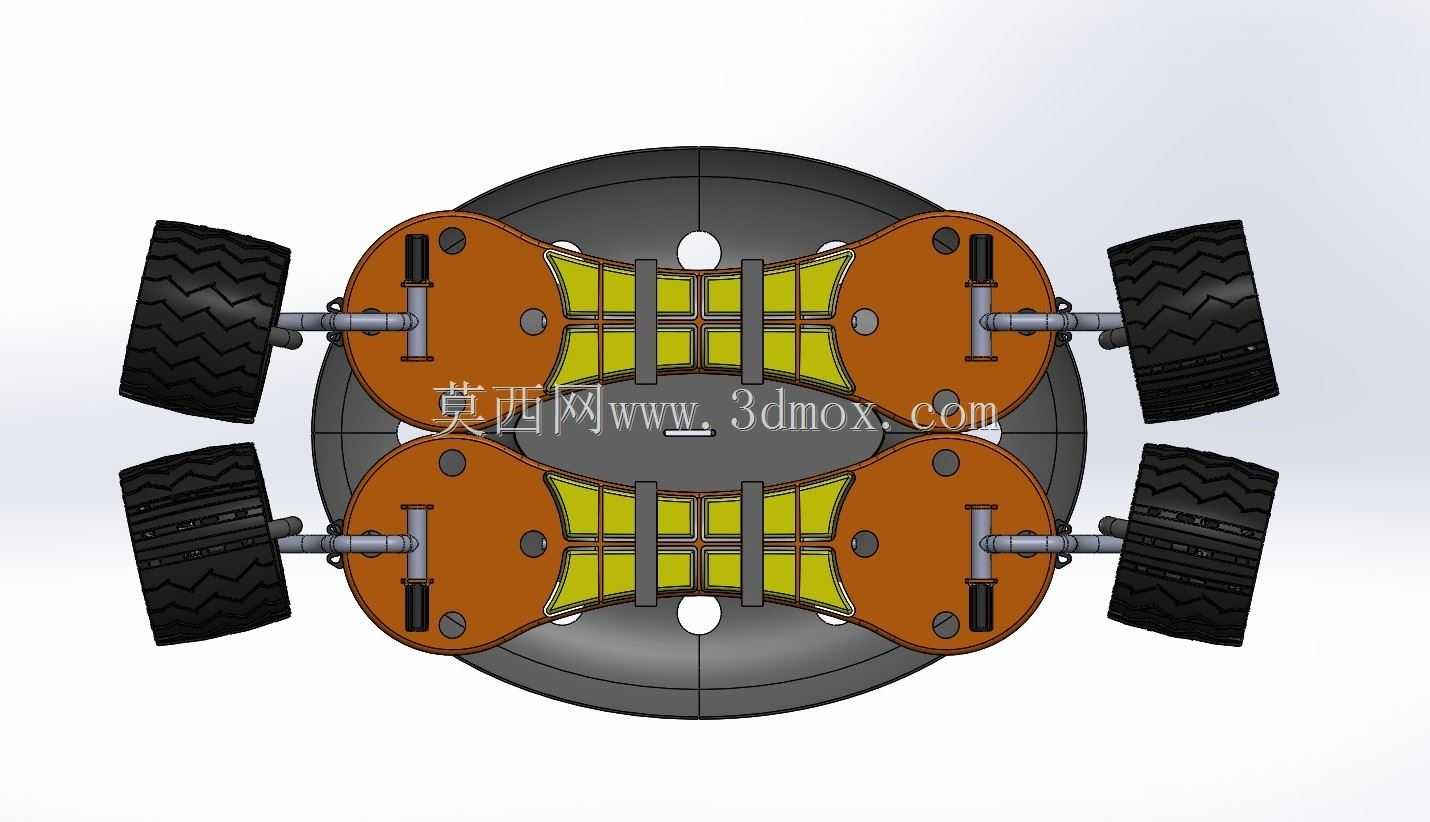
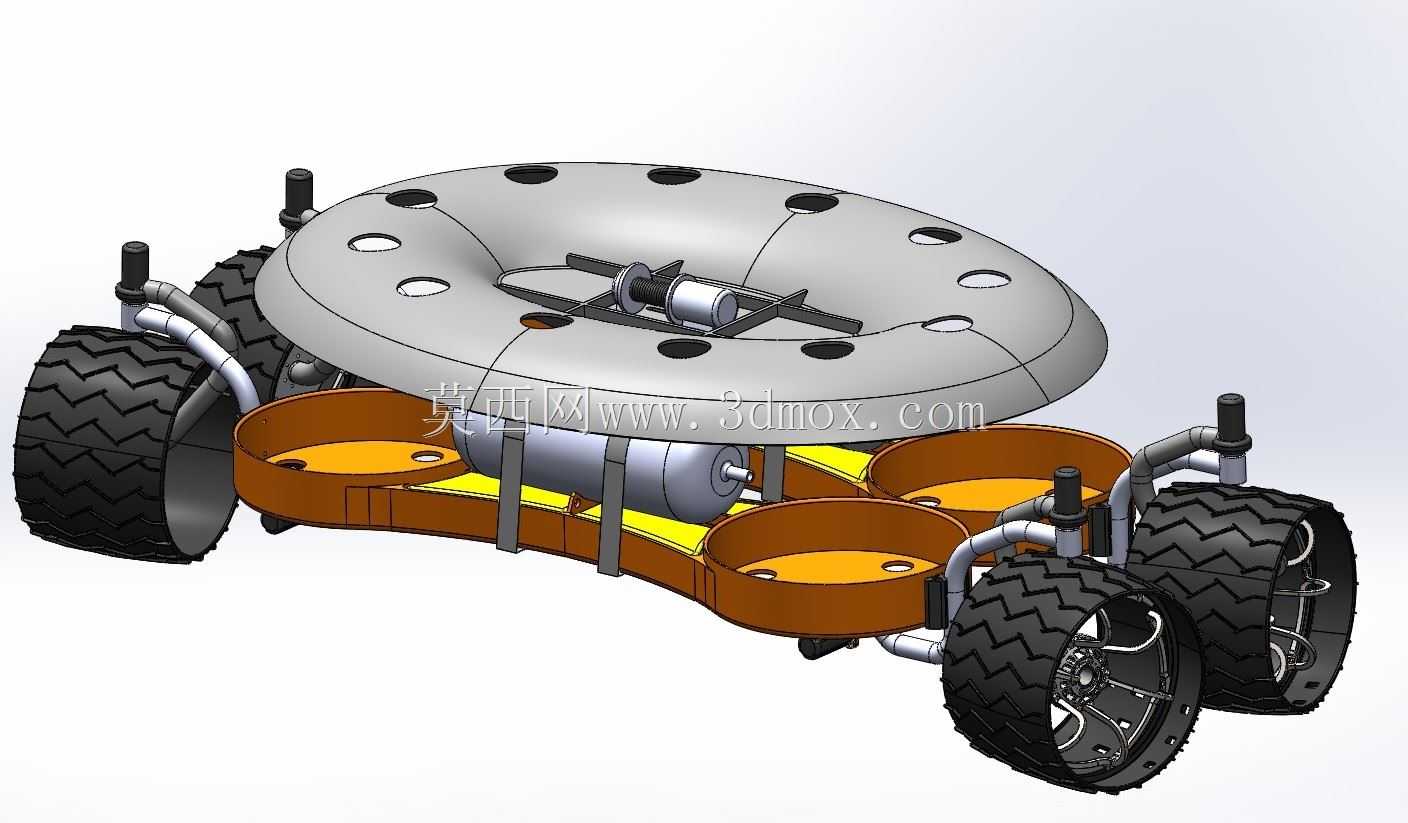

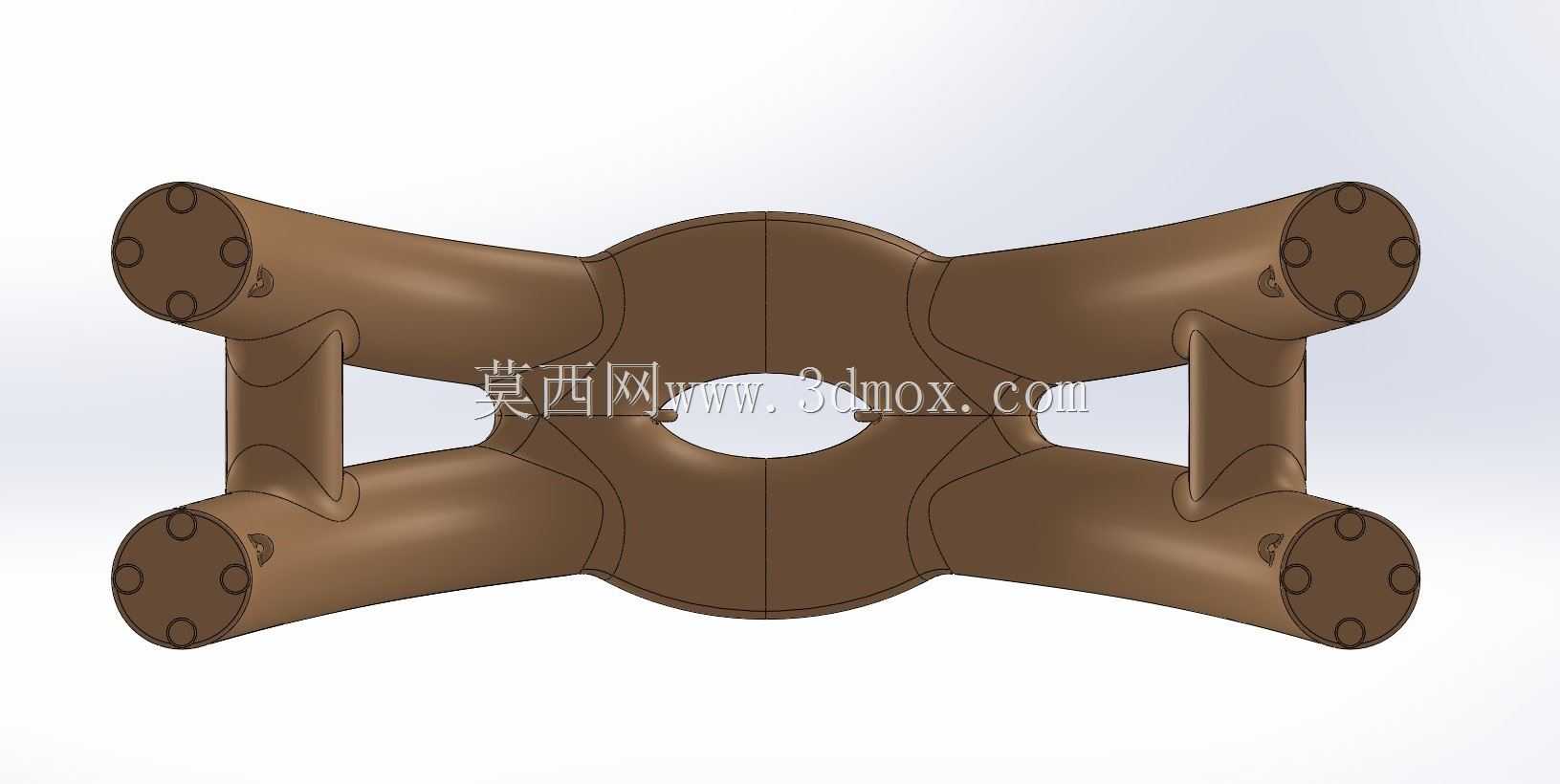
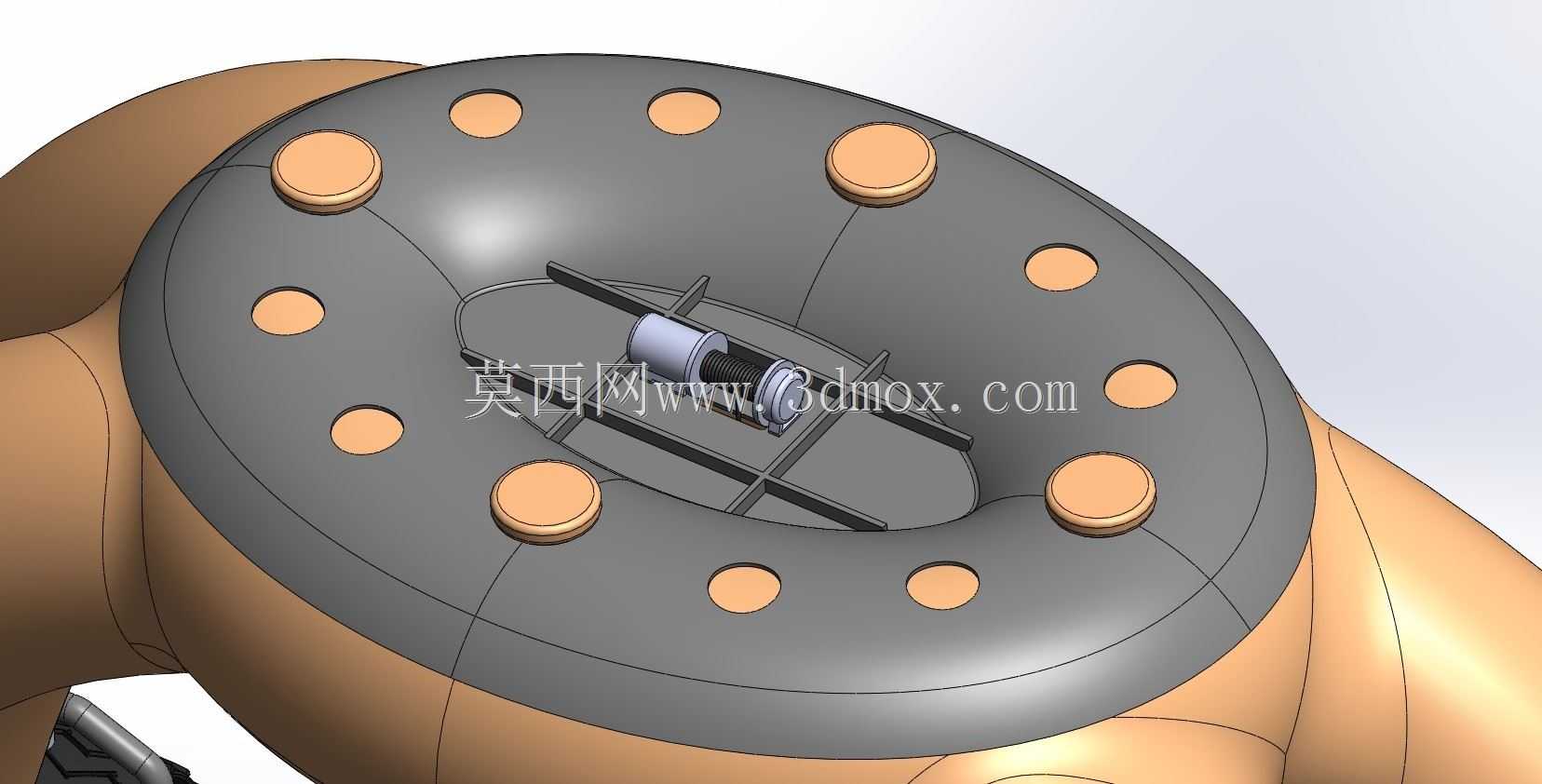

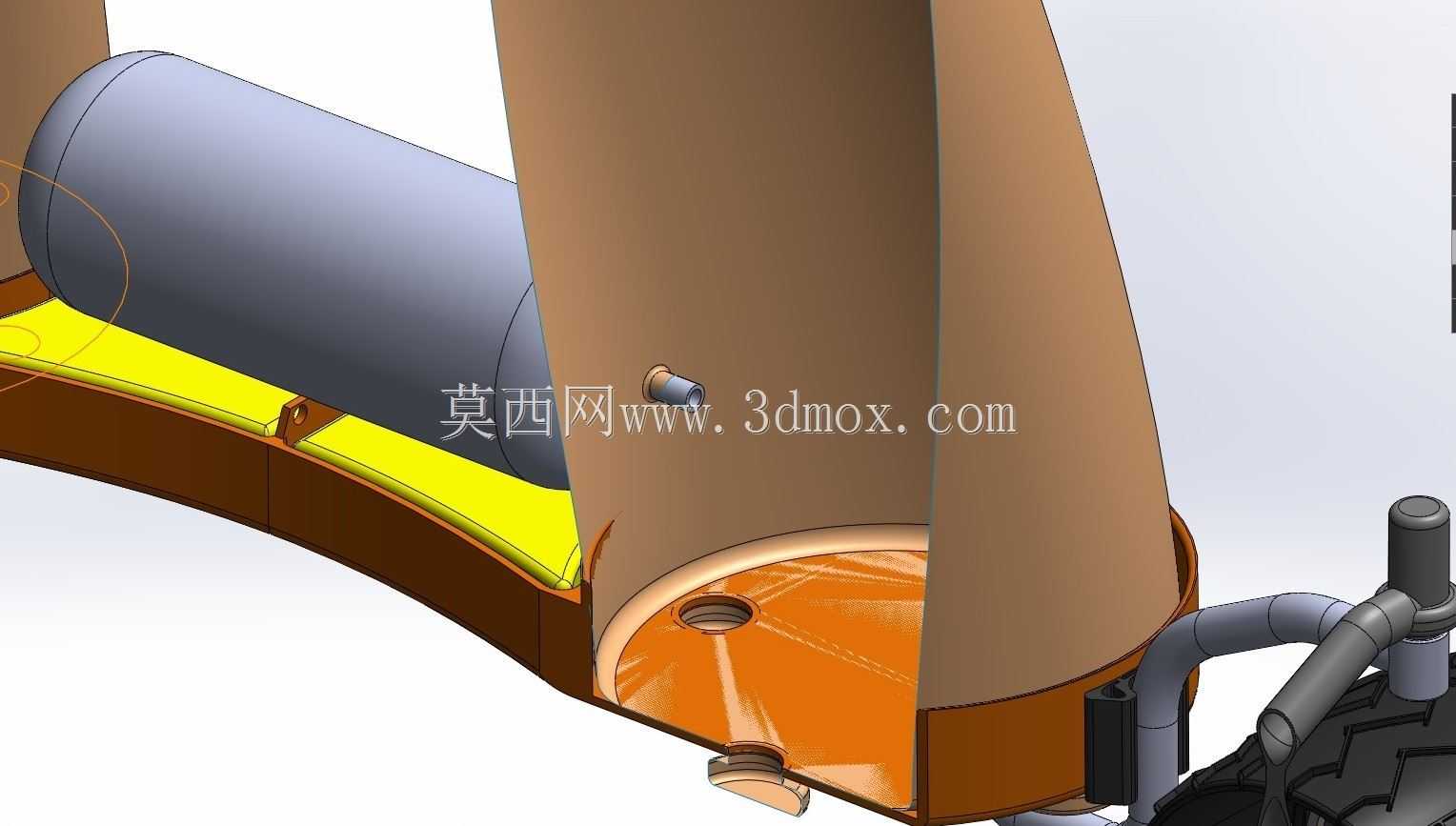
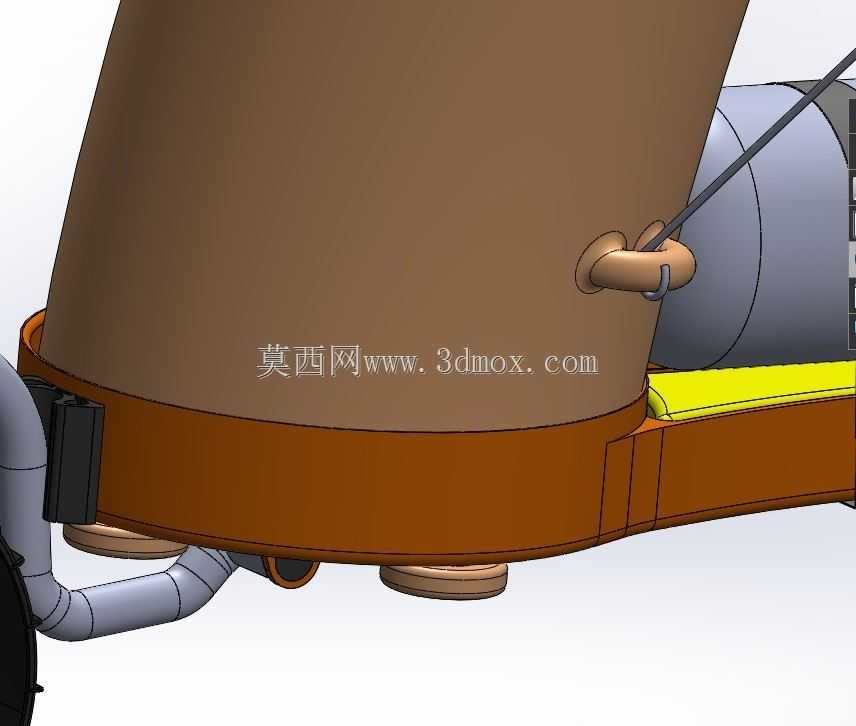
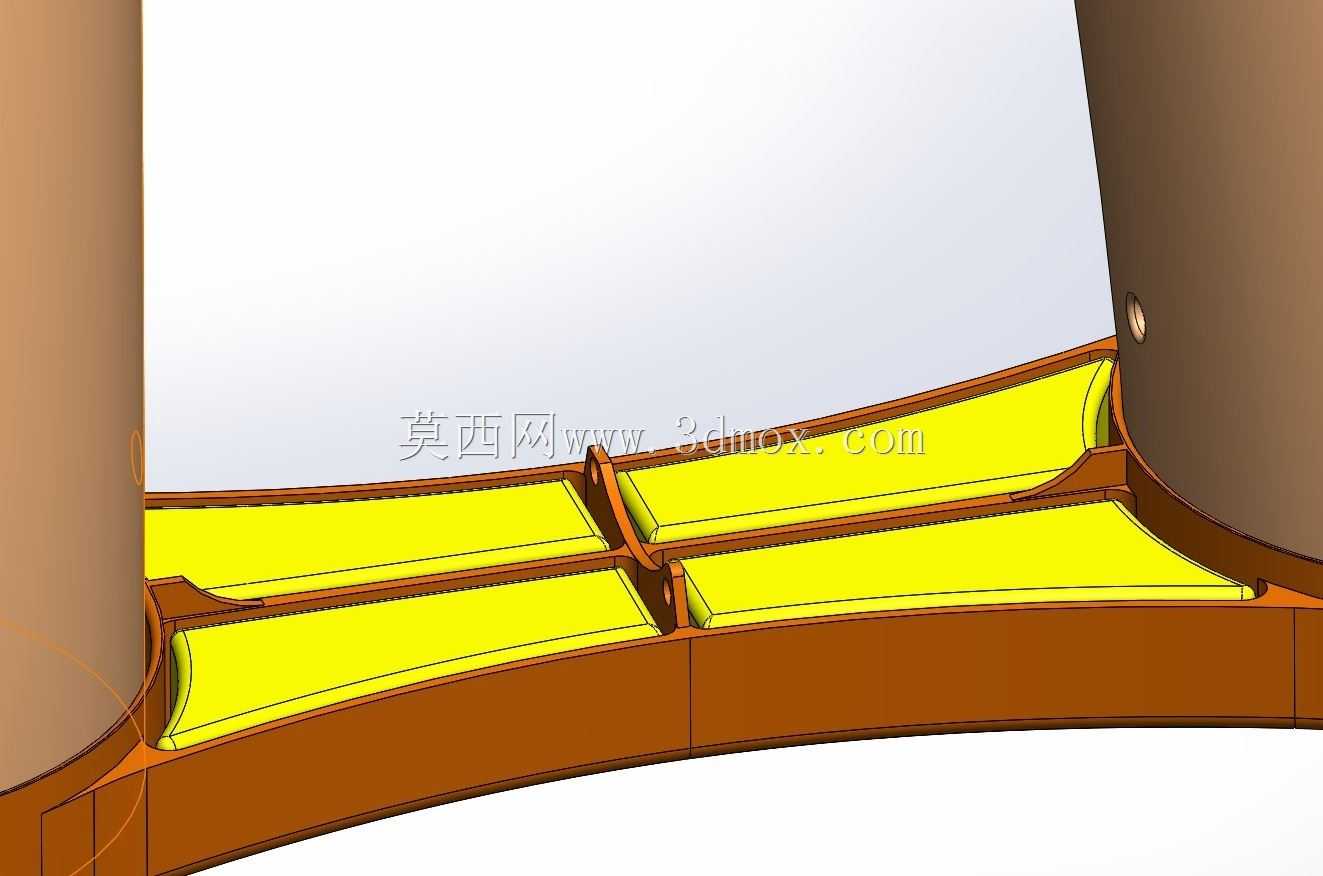

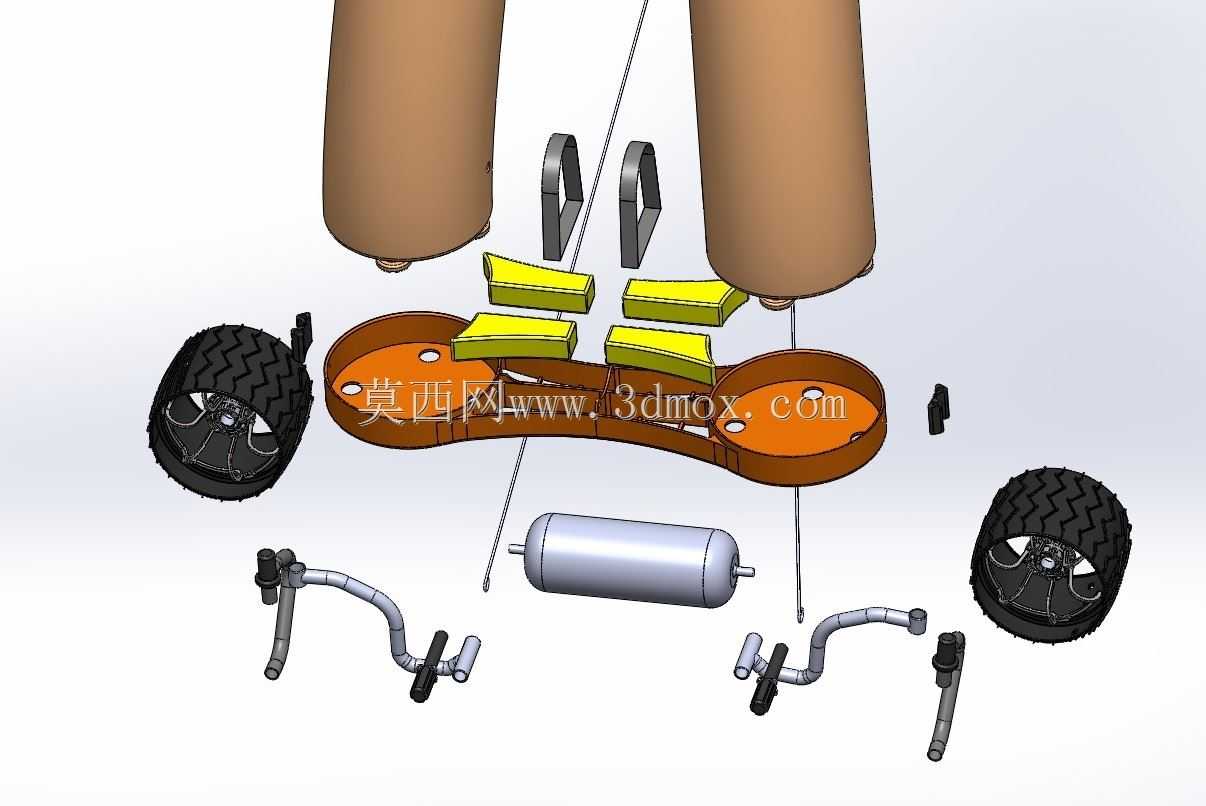


总体思路:4个等距腿的设计将使在月球表面移动更加困难,并使机架不太稳定。三条腿的设计也是如此。另一方面,在某些情况下,要将这样一个4条腿的框架放置在相对于payload.So 我用传统的龙门架的形状来消除这些problems.RIGIDITY:充气时,气压要使弯曲的形状呈平面状,但电缆会承受张力,不允许弯曲的形状“展开”。这种预应力使得这种设计更加stable.CHASSIS:我试着把它设计得尽可能轻。它将电池和油箱固定到位,并将车架连接到悬挂连杆上。通过底盘上的孔和机架上相应的凸台提供与机架的连接other.SUSPENSION:我用好奇号火星车的轮子,here:Wheel- NASA-JPL 好奇漫游者车轮所有4个车轮都有330度的转向能力。电机采用轮毂式无刷电机。把轮子固定在身体上的手臂可以用步进电机控制。如果这些步进电机发生故障,橡胶减振器将防止臂损坏底盘,同时允许系统继续工作perform.HOIST:铝“帽”连接到框架顶部,提供安装起重机的位置,并在表面分配负载,以防止应力集中。盖子上的这些孔是用来减轻重量的,还有4个孔是用来安装盖子的frame.hook file:Hook 5 tonsI改变了尺寸,增加了孔以减轻重量。电源:增加太阳能电池板将使机架更重,更笨重,而他们提供很少的电力相比,他们的大小。相反,我们可以添加更多的电池。电池可以通过连接到RTG(放射性同位素热电发电机)或任何其他电源进行充电sources.Mack R文件:Mack R seriesI将添加更多的照片和描述
标签:


- 模型大小 :55.15 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,Rendering