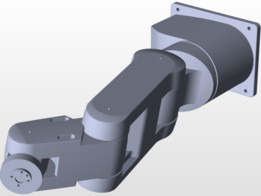
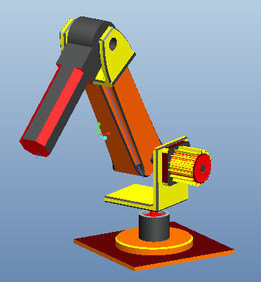
四自由度机械臂
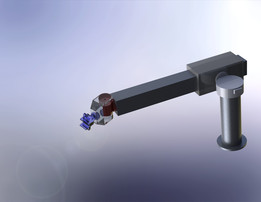
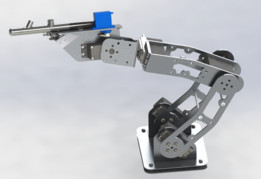
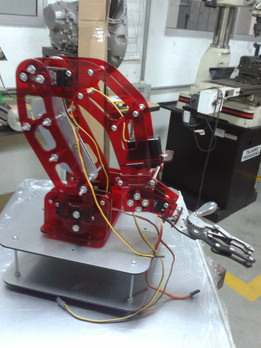
四自由度机器人手臂有四个关节来模仿人类上臂,即分别围绕x、y和z轴旋转的关节1、2、3和4。关节移动四个手臂链接,以获得所需的手腕姿势,将与手在未来的应用组装
标签:


- 模型大小 :278.07 KB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS


四自由度机器人手臂有四个关节来模仿人类上臂,即分别围绕x、y和z轴旋转的关节1、2、3和4。关节移动四个手臂链接,以获得所需的手腕姿势,将与手在未来的应用组装