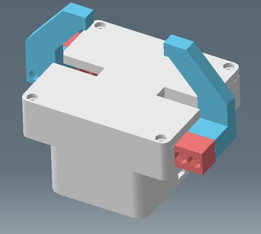
蛇形医疗机器人
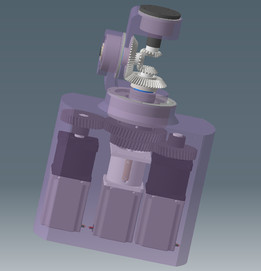
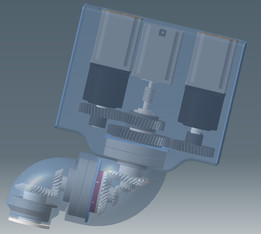
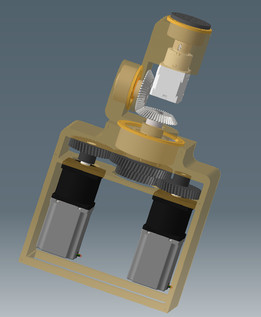
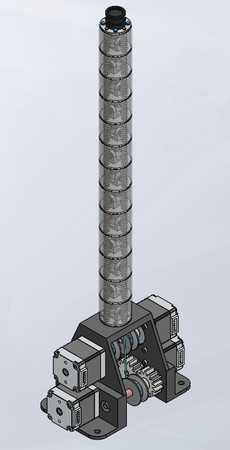
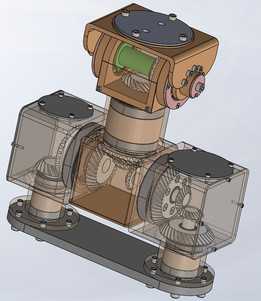
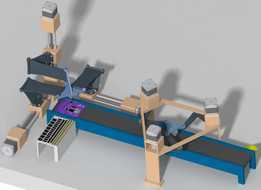
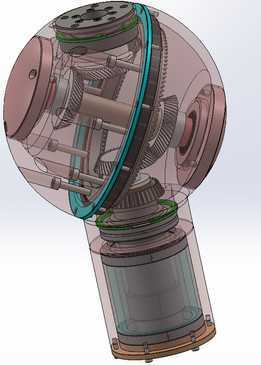
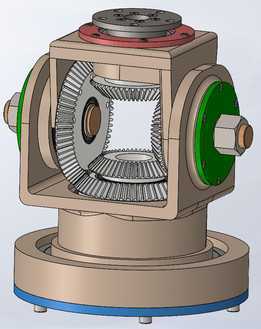
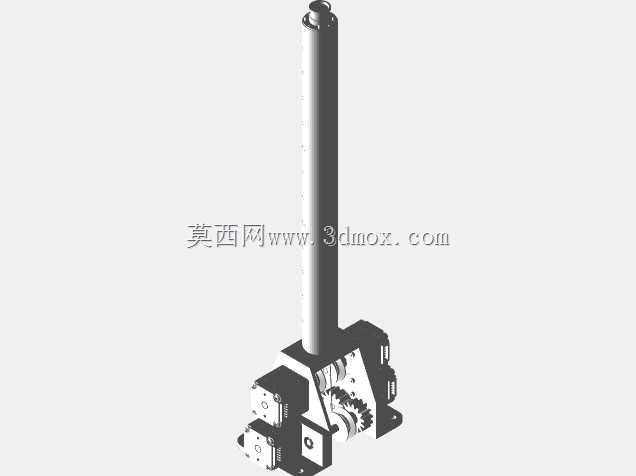
这是我为一个学期项目设计的机器人原型。该机器人由两个主要组件组成:机器人主体和基座控制组件。机器人使用一个由缆绳和弹簧组成的系统来控制蛇节的运动。四个电机正在拉动和释放电缆以获得移动。在蛇装配的末端有一个带LED灯的摄像头


- 模型大小 :94.08 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,Rendering,VRML / WRL,STEP / IGES


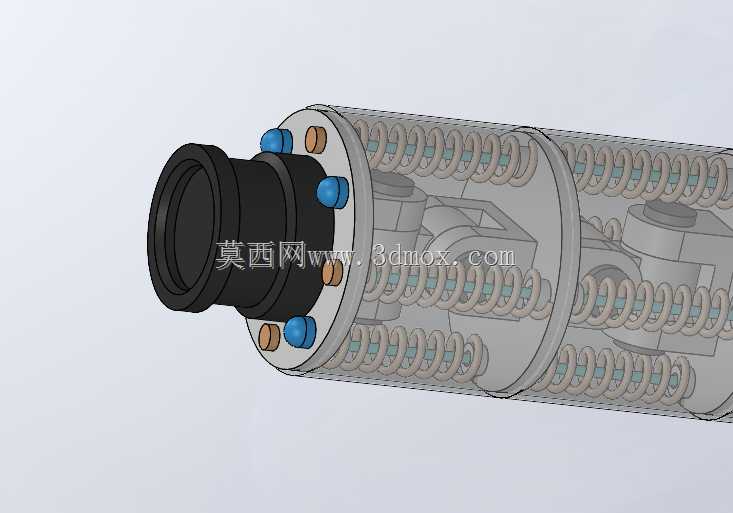
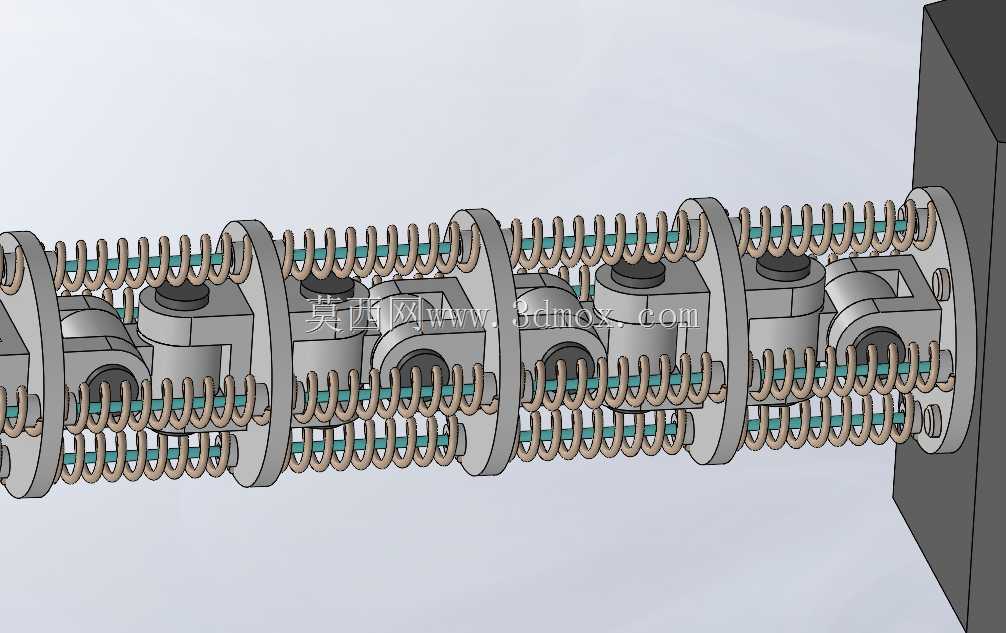
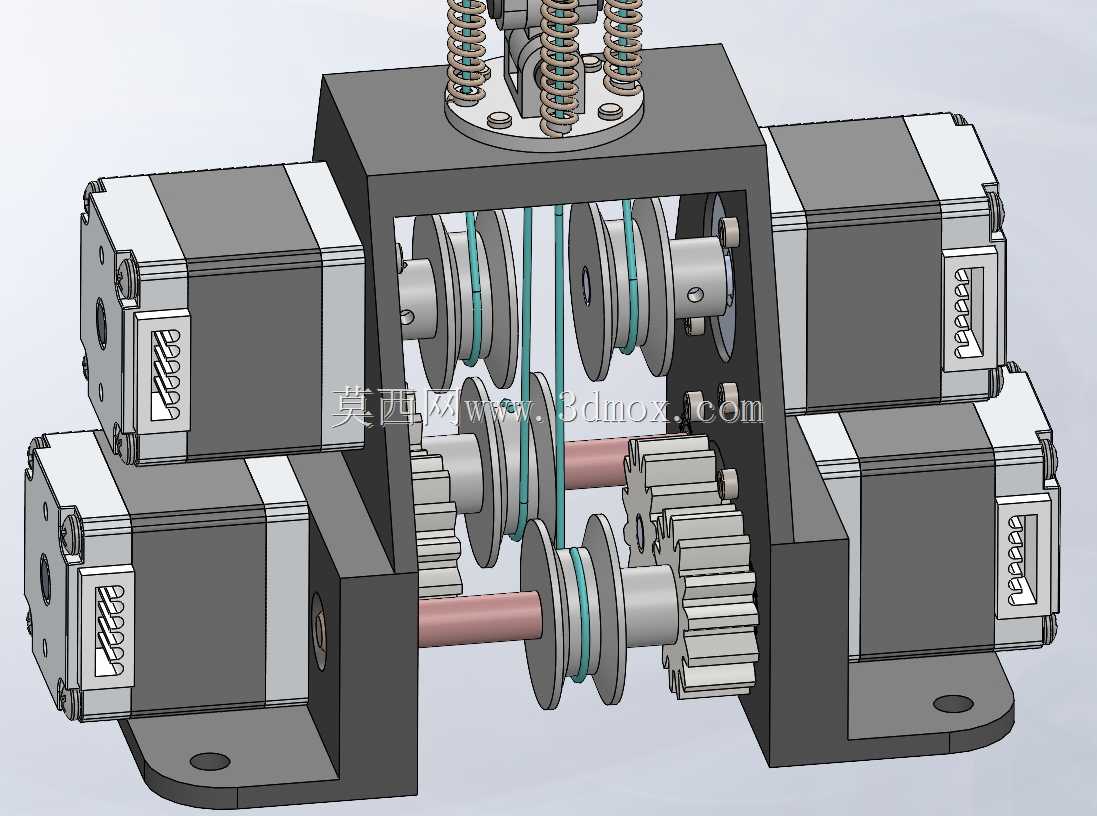


这是我为一个学期项目设计的机器人原型。该机器人由两个主要组件组成:机器人主体和基座控制组件。机器人使用一个由缆绳和弹簧组成的系统来控制蛇节的运动。四个电机正在拉动和释放电缆以获得移动。在蛇装配的末端有一个带LED灯的摄像头