

机器人自动显微镜

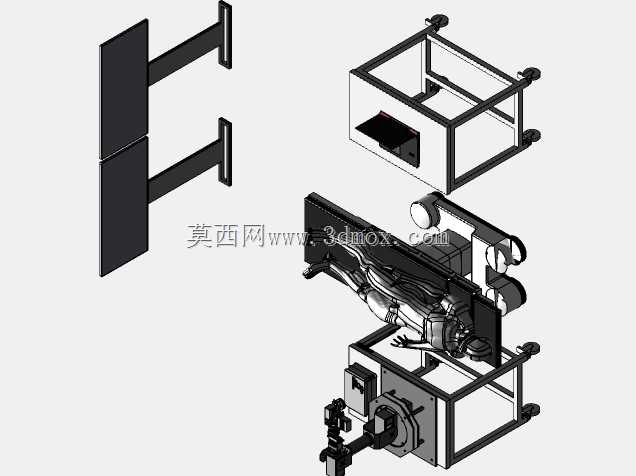



机器人自动化显微镜项目是第四年生物医学工程设计项目。这个导航系统的目的是通过在整个手术过程中跟踪手术器械来提高手术安全性。给定CV跟踪算法提供的手术器械的位置,控制系统将相应地调整机械臂末端执行器处显微镜的位置,以提供手术场的放大视图。该项目文件夹展示了理论手术室布局的三维设计以及机器人臂、手术器械和PCB等组件
------分隔线----------------------------
- 上一篇:文学士?菅直人
- 下一篇:Meja kopi,咖啡桌,人字风格

说点什么吧
- 全部评论(0)

还没有评论,快来抢沙发吧!
- 模型大小 :450.94 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,STEP / IGES,STEP / IGES,Other,Rendering,STEP / IGES,Other,Other,Other,Other,Fusion 360,Fusion 360,Fusion 360,Fusion 360,Other,Fusion 360,Fusion 360,Other,Fusion 360,Fusion 360,Fusion 360,Fusion 360,Other,Fusion 360,Fusion 360,Other,Fusion

















