机器人割草机(MCT 382)


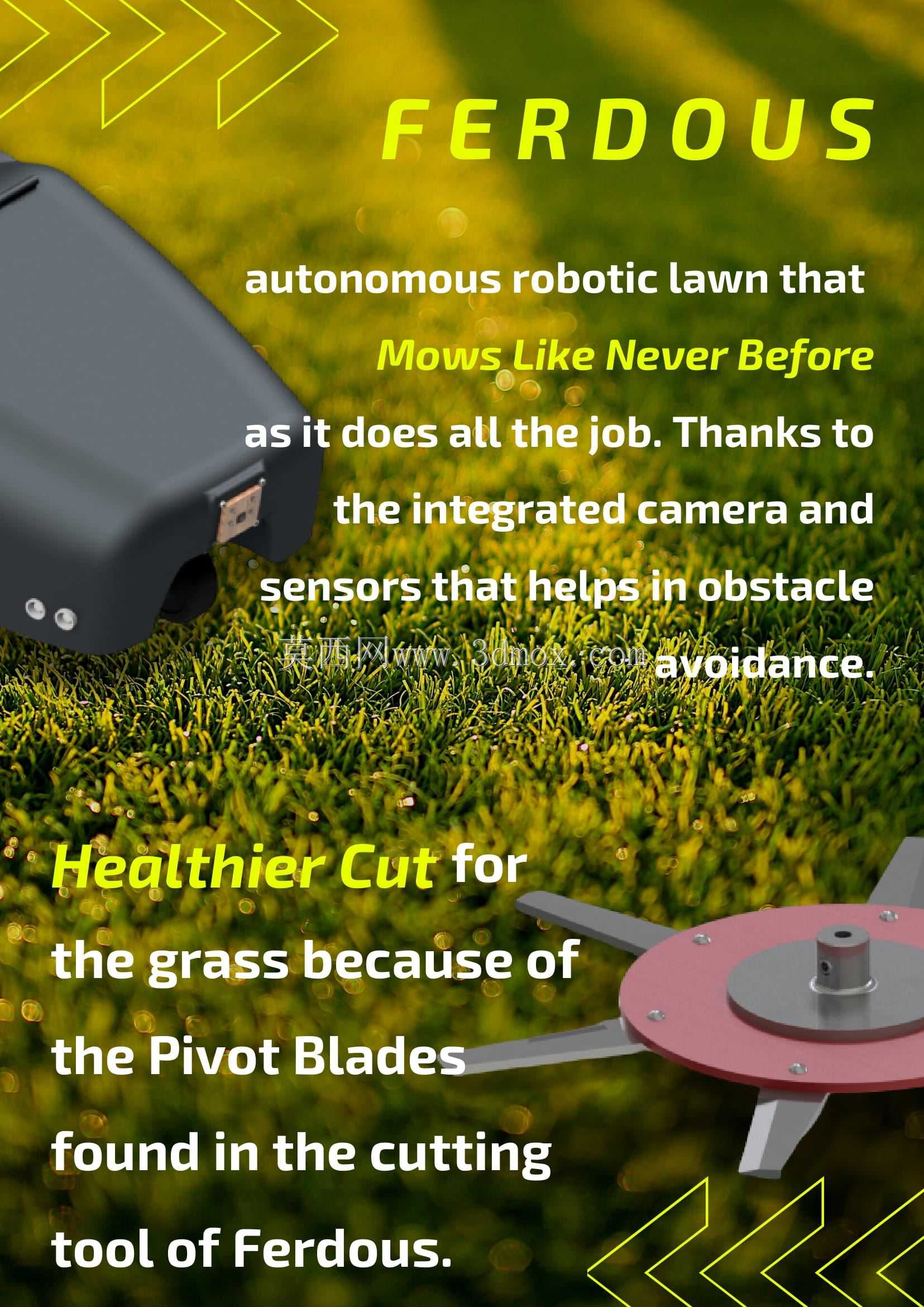
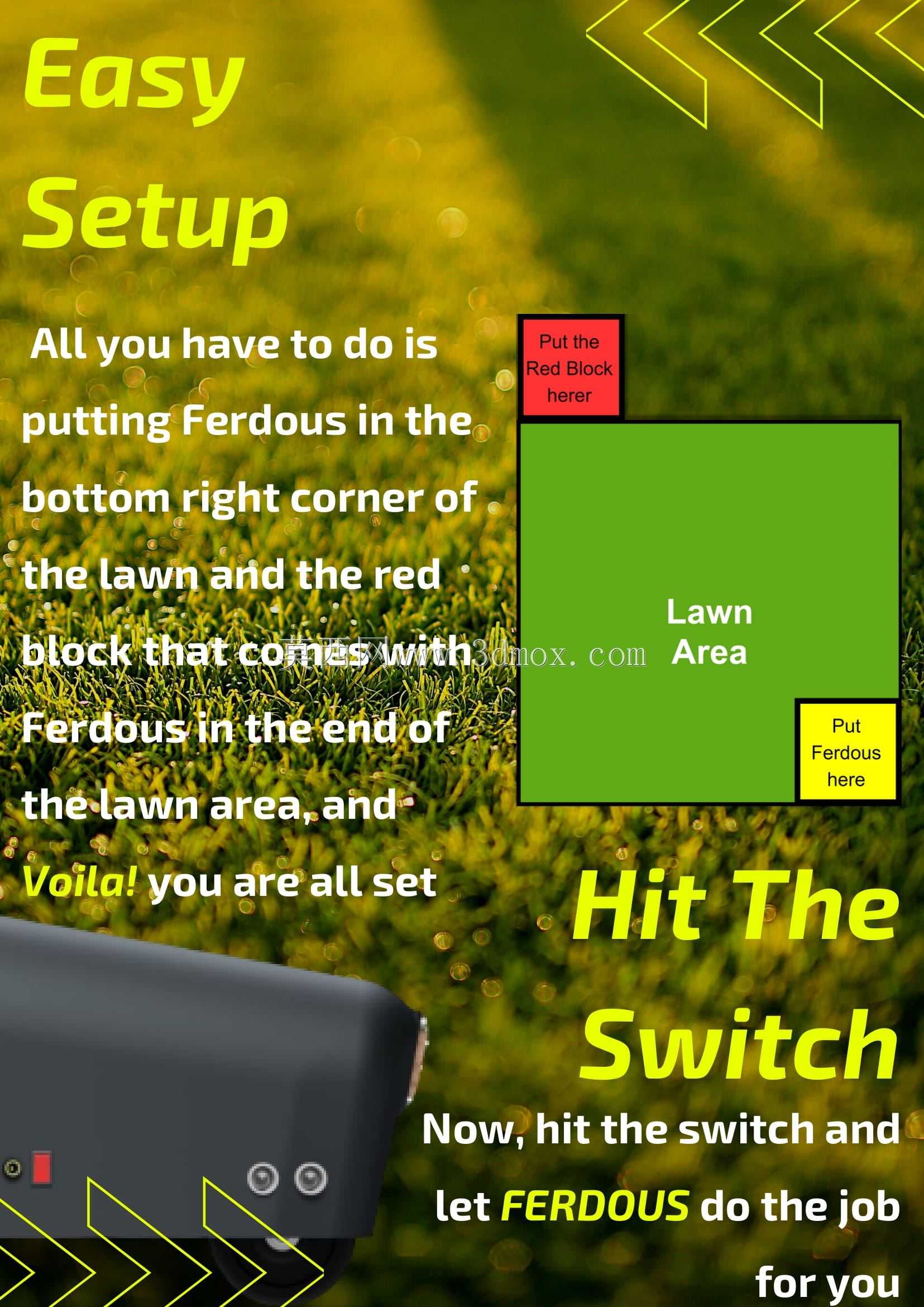
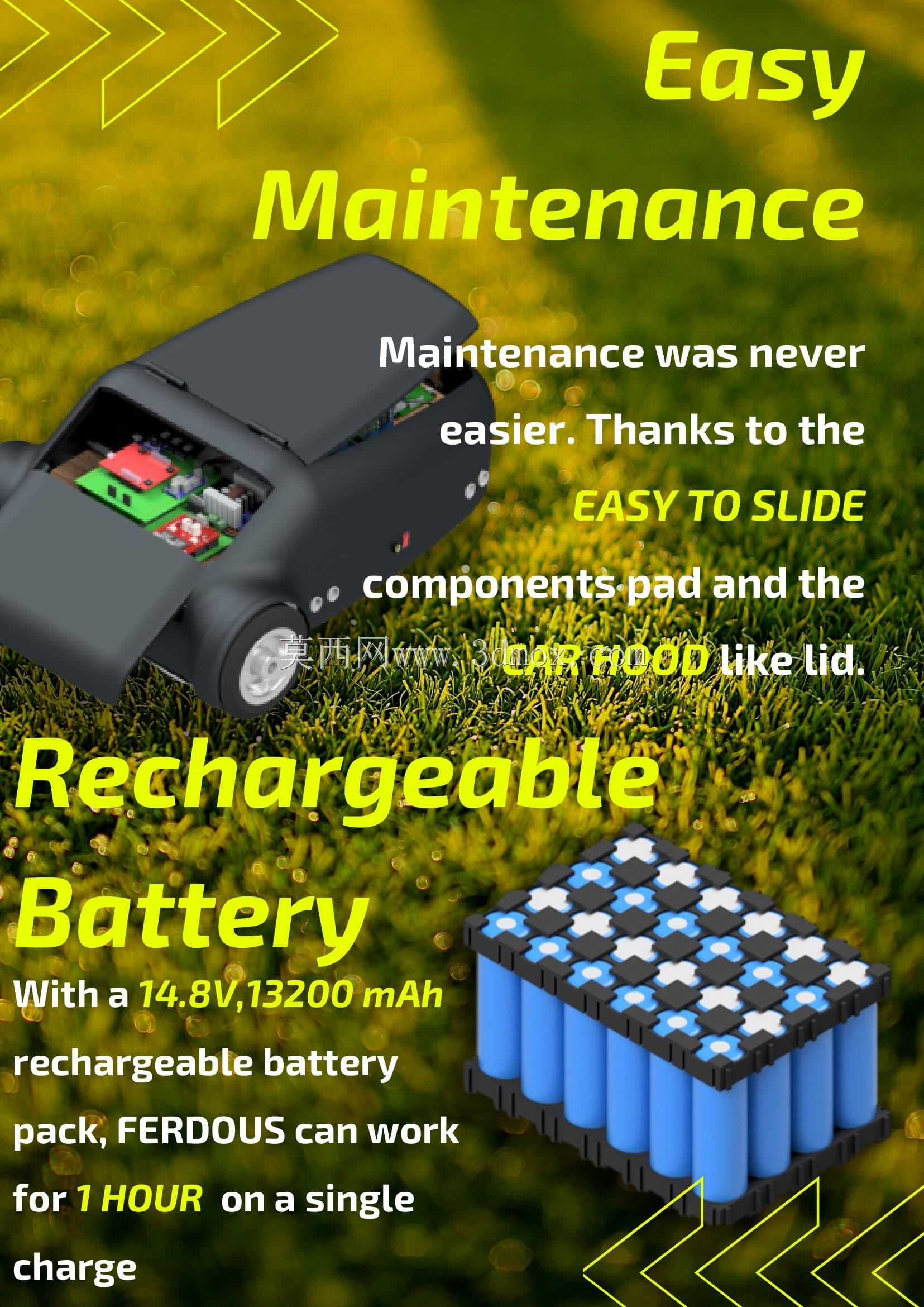

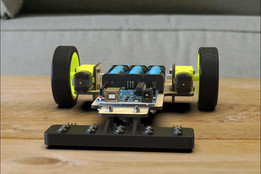
我们决定为我们的MCT382课程做一台自动割草机。这个机器人割草机的名字叫费杜斯。费杜斯是一个自动的机器人割草机,也就是说,它可以自动移动,而不需要用户的任何驱动控制。多亏了连接在弗杜斯上的摄像头,它不仅有助于探测障碍物以避开障碍物,而且还可以让弗杜斯在到达草坪时探测到草坪的尽头。除了四个附加的超声波传感器,它可以帮助费杜在与周围环境无碰撞的环境中转弯。由于驱动费杜的电动执行器,它不会像使用柴油发动机的传统割草机那样发出噪音。当它上市时,我们决定让它成为一个B2B业务。这意味着我们的目标是草坪管理员和花园护理公司,处理化合物和私人花园的客户业主。我们做这个决定,因为我们正在销售一种移动园艺工具,可以在不同的地方使用一次以上。因此,这将是市场所需要的,因为它将有助于这些公司更好更快地履行他们的工作,因为Ferdous将允许园丁多任务,因为自动驾驶机器人割草机。这个项目是在CoppeliaSim Edu(原V-rep)上模拟的,显示了Ferdous的工作环境和不同的情况它在表演中可能面对的。仿真代码用Python编程语言实现,并通过CoppeliaSim提供的API远程函数与CoppeliaSim-Edu连接
标签:


- 模型大小 :97.28 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :Autodesk Inventor,Other,Rendering