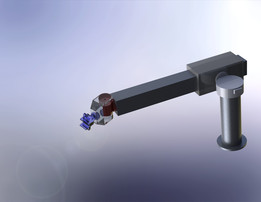
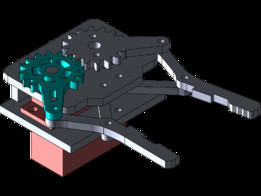
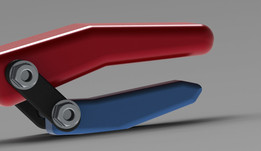
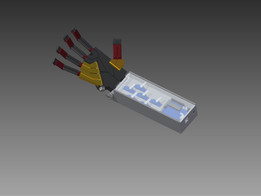
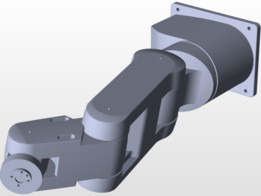
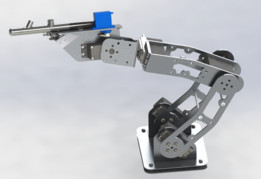
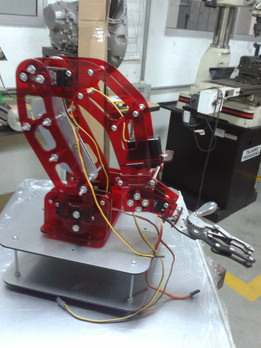
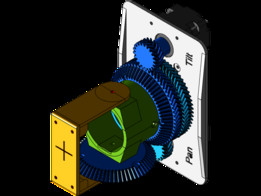
基于开源uArm的机械臂建模
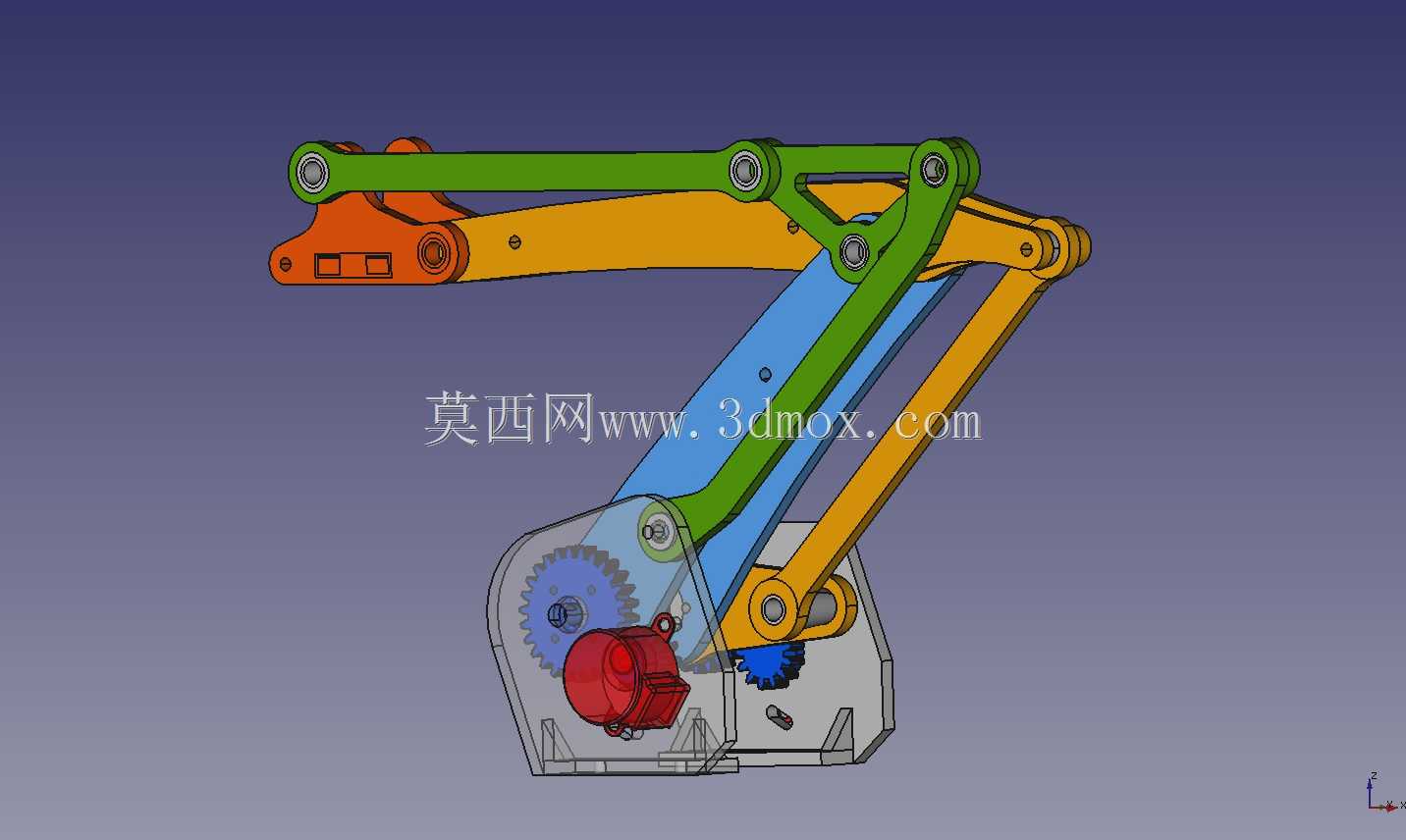
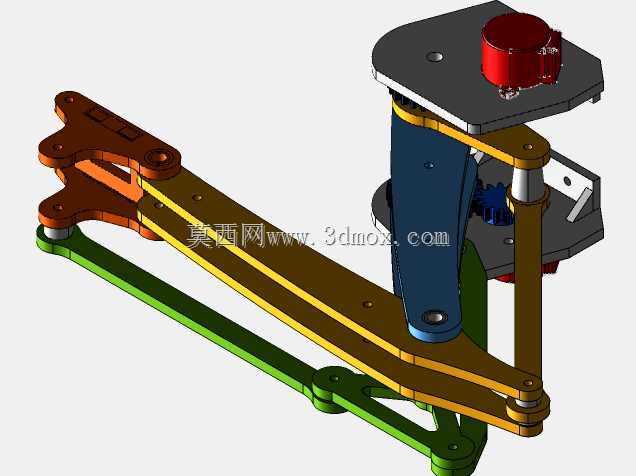
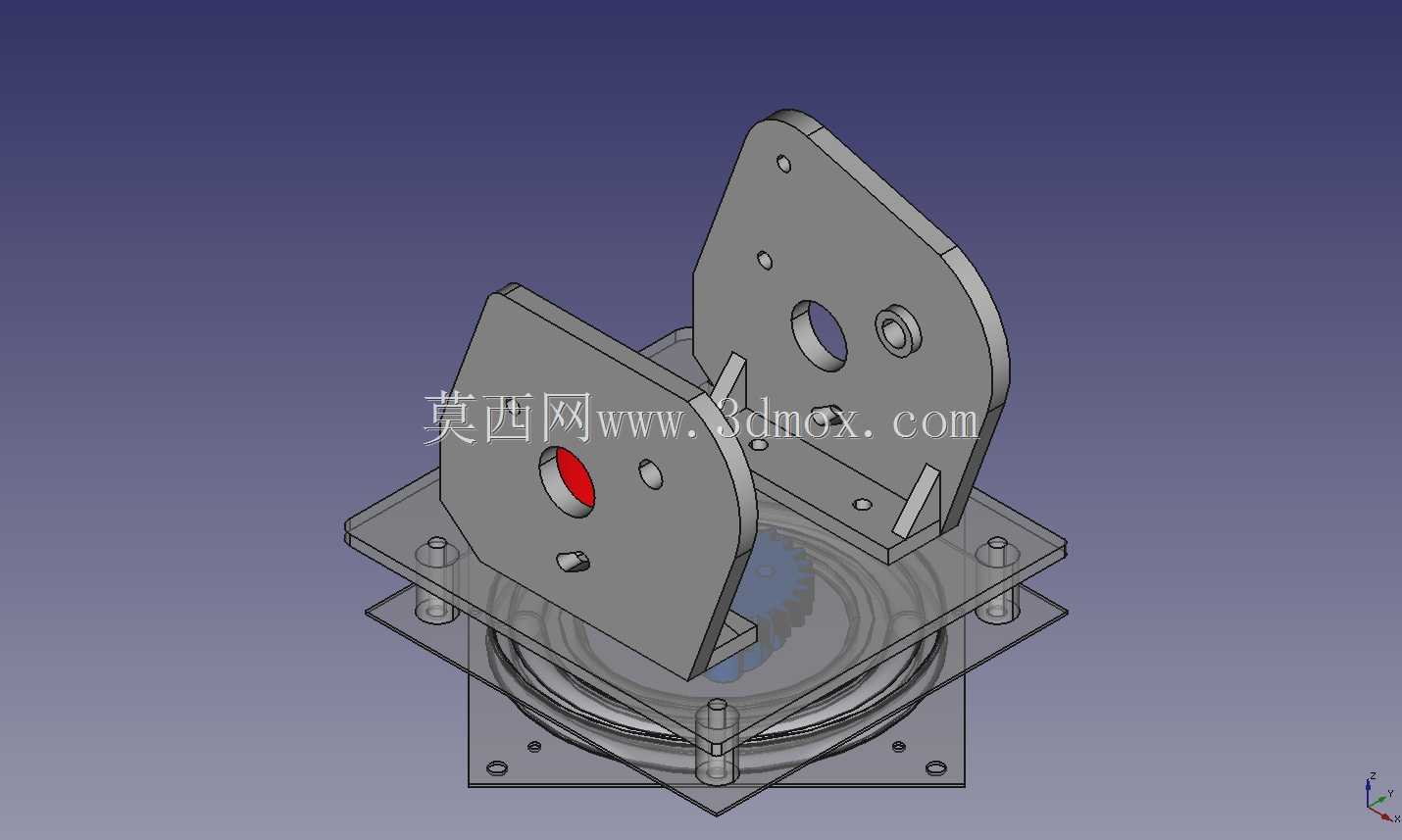
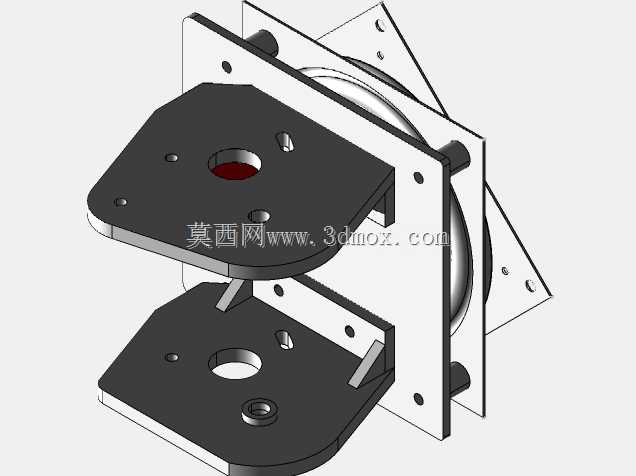
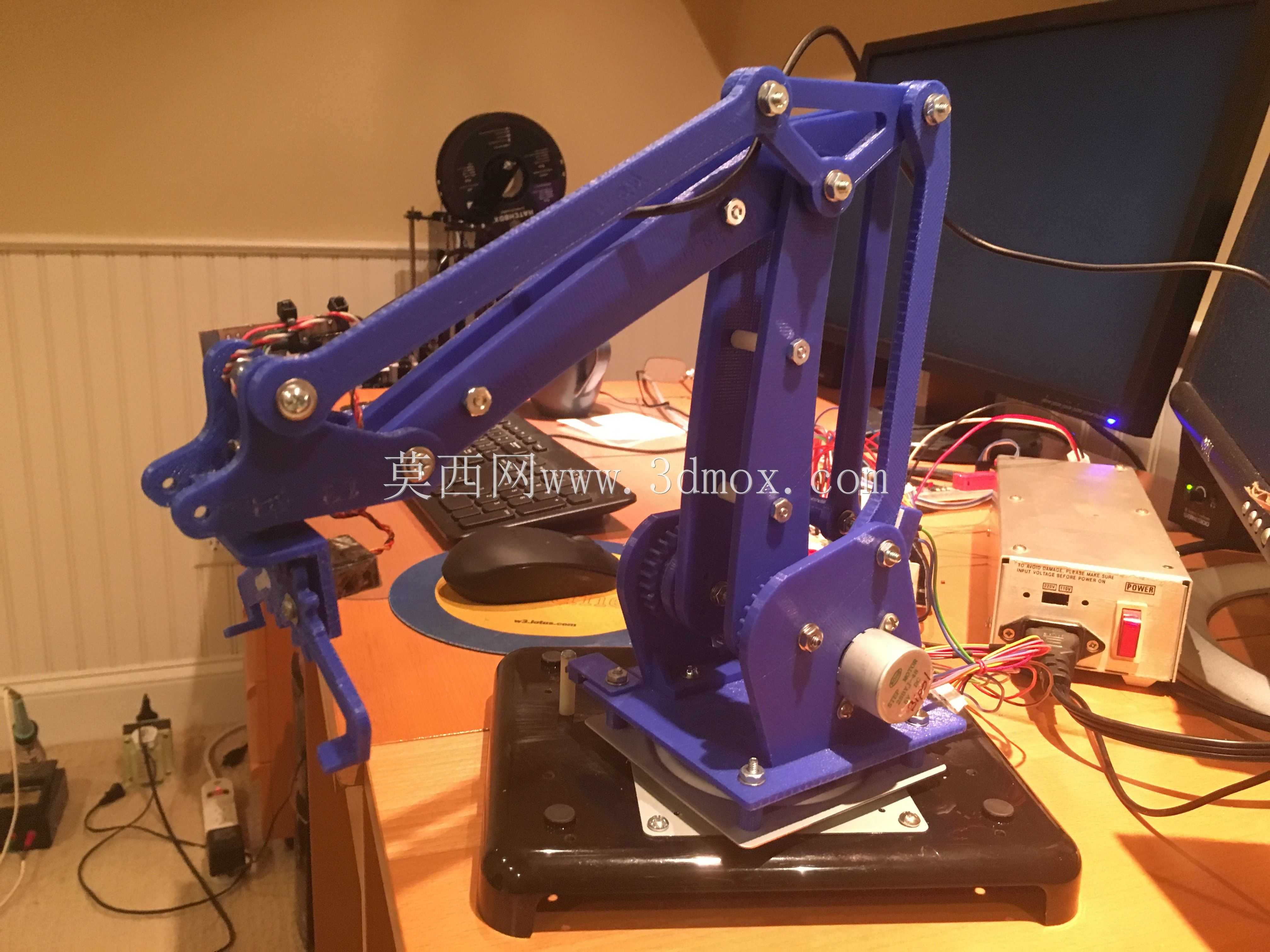
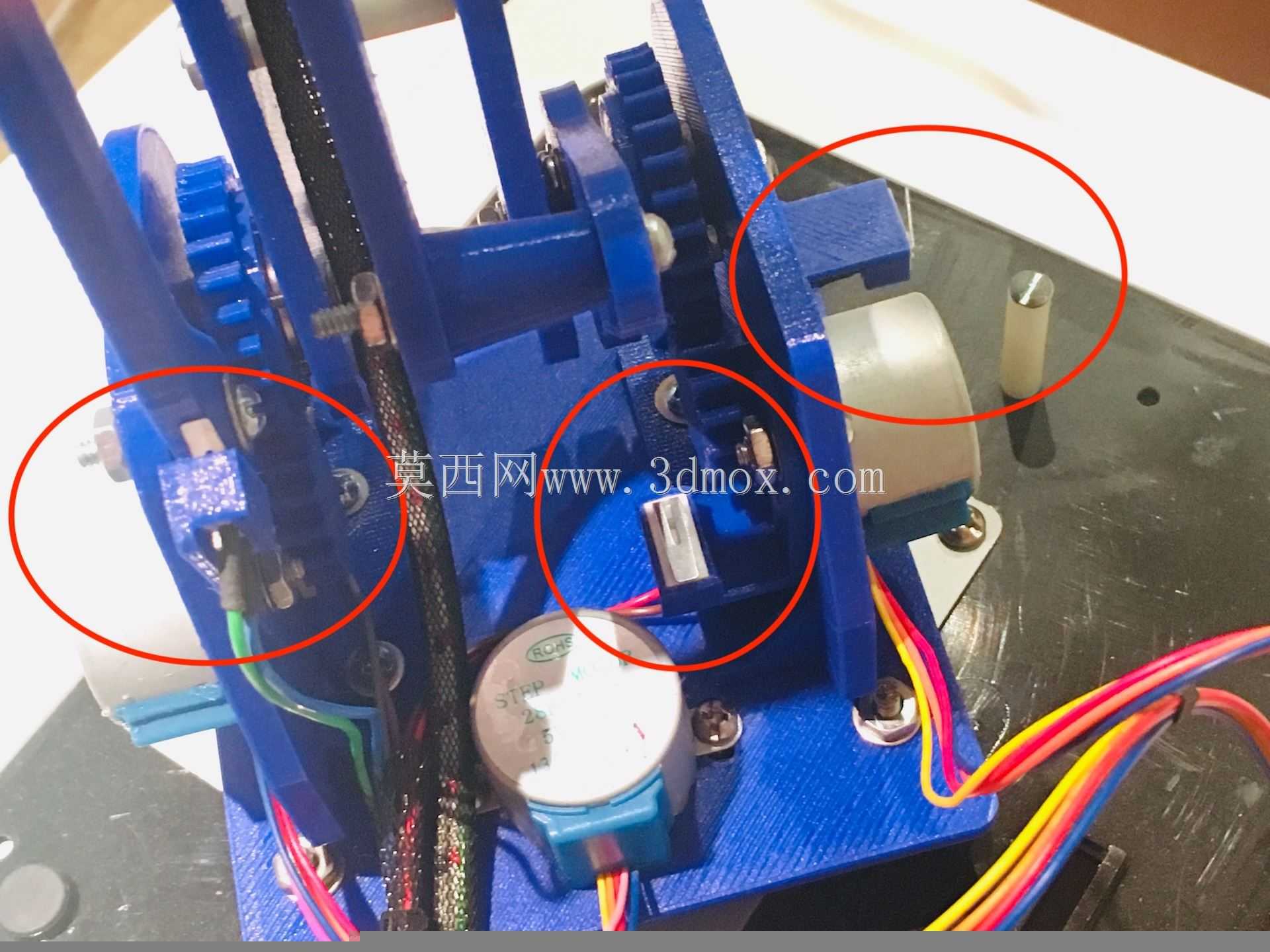


















这个机械臂是仿照原始的开源uArm设计的,可以在3D打印机上打印。该机型采用28BYJ-48步进电机代替伺服电机,并增加了伺服驱动的夹持器。步进电机被改造成双极电机,以获得额外的转矩。其他的改造包括使用6个螺丝代替公制螺丝,以及用五金件制成的铰链储存各种长度的1/4“尼龙垫片。更多细节、代码和图片请参见本网页https://sites.google.com/site/eyalabraham/robotic-arm.你知道吗


- 模型大小 :85.13 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,STEP / IGES,STEP / IGES,Rendering,STEP / IGES,Rendering,Other,STEP / IGES,Rendering,STEP / IGES,STEP / IGES,STEP / IGES,STEP / IGES,STEP / IGES,STEP / IGES,STEP / IGES,STEP / IGES,STEP / IGES,STEP / IGES,STEP / IGES,STEP / IGES,