仿人足机器人



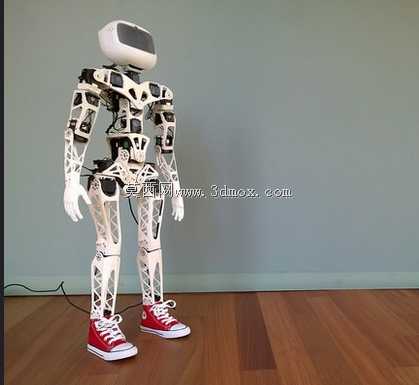



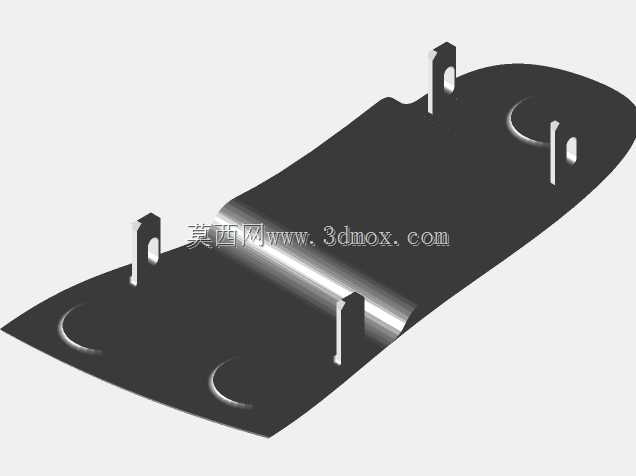

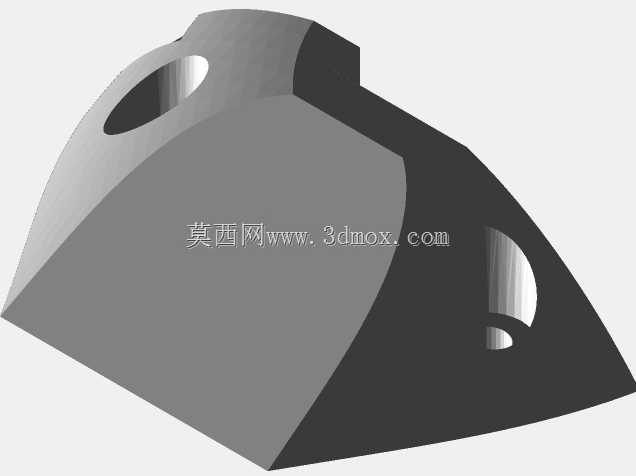
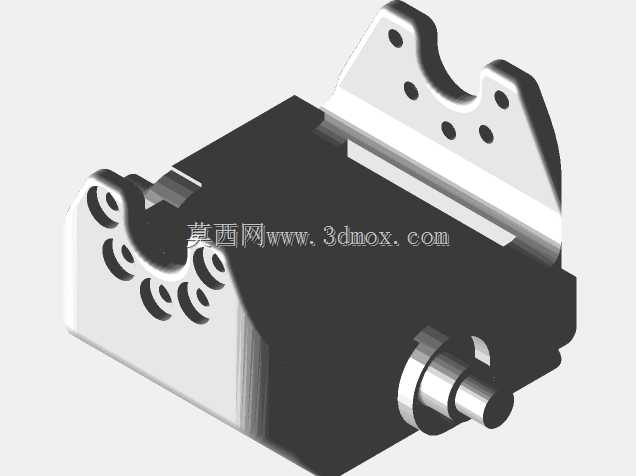
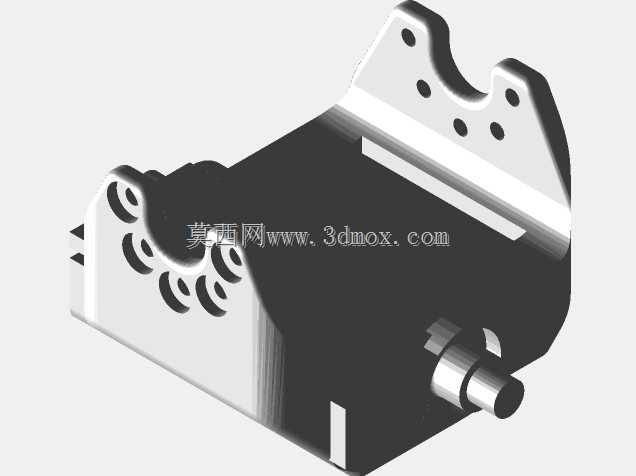












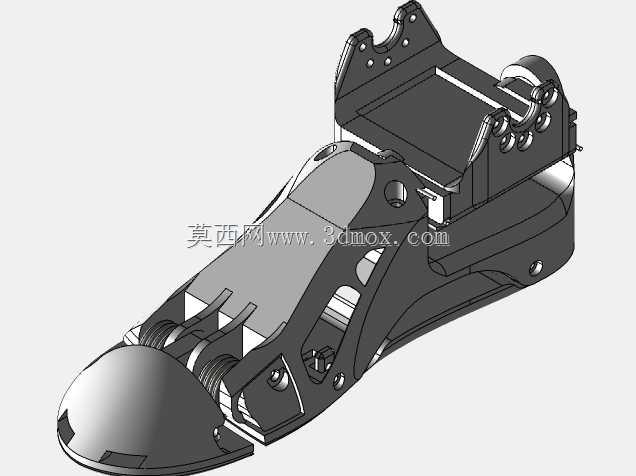
在我上一次在工程学院实习期间,我创造了一个半被动的仿生人形脚。解决方案是半被动踝关节(运动为矢状旋转和弹簧为正面旋转)此外,这只脚有脚趾。脚是人形的脚,它尊重2岁孩子的尺寸,可以把这只脚放进鞋子里(23号EU)。它与机器人电机MX28兼容。我很感激你的评论,如果你想买这个型号或信息,请给我写一封电子邮件mailhttps://github.com/Alexandre-lefalher/humanoid-feet 该项目旨在创建一个具有3D打印Poppy\u humanoid的人形机器人开源:https://github.com/poppy-project/poppy-humanoid.git你知道吗


- 模型大小 :34.41 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,STL,STL,Rendering,STL,STL,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,STL,STL,SOLIDWORKS,STL,Rendering,SOLIDWORKS,STEP / IGES,SOLIDWORKS,Rendering,STL,STL,STL,STL,STL,STL,Rendering,SOLIDWORKS,SOLIDWORKS,STL,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS