

遥控扭锁

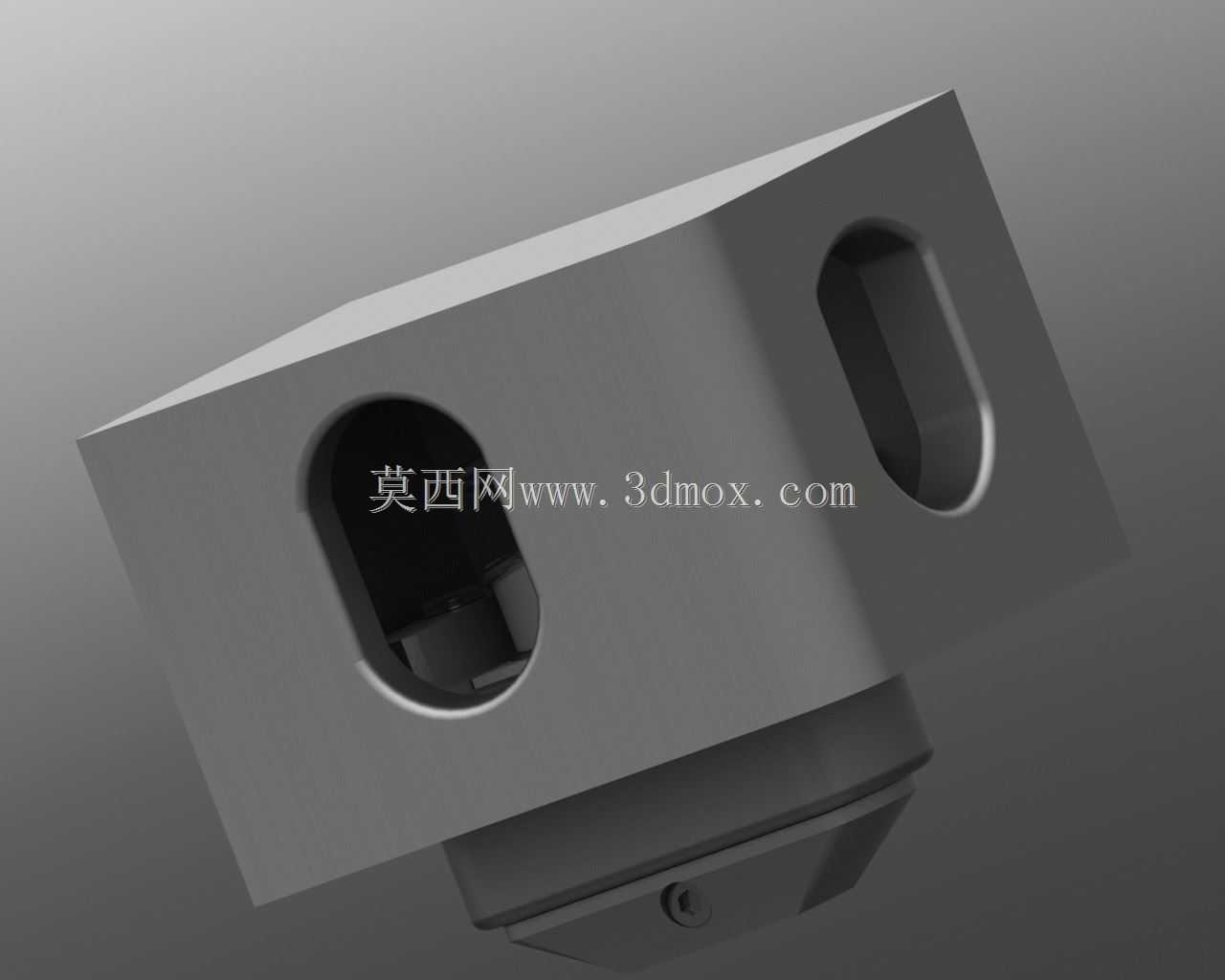
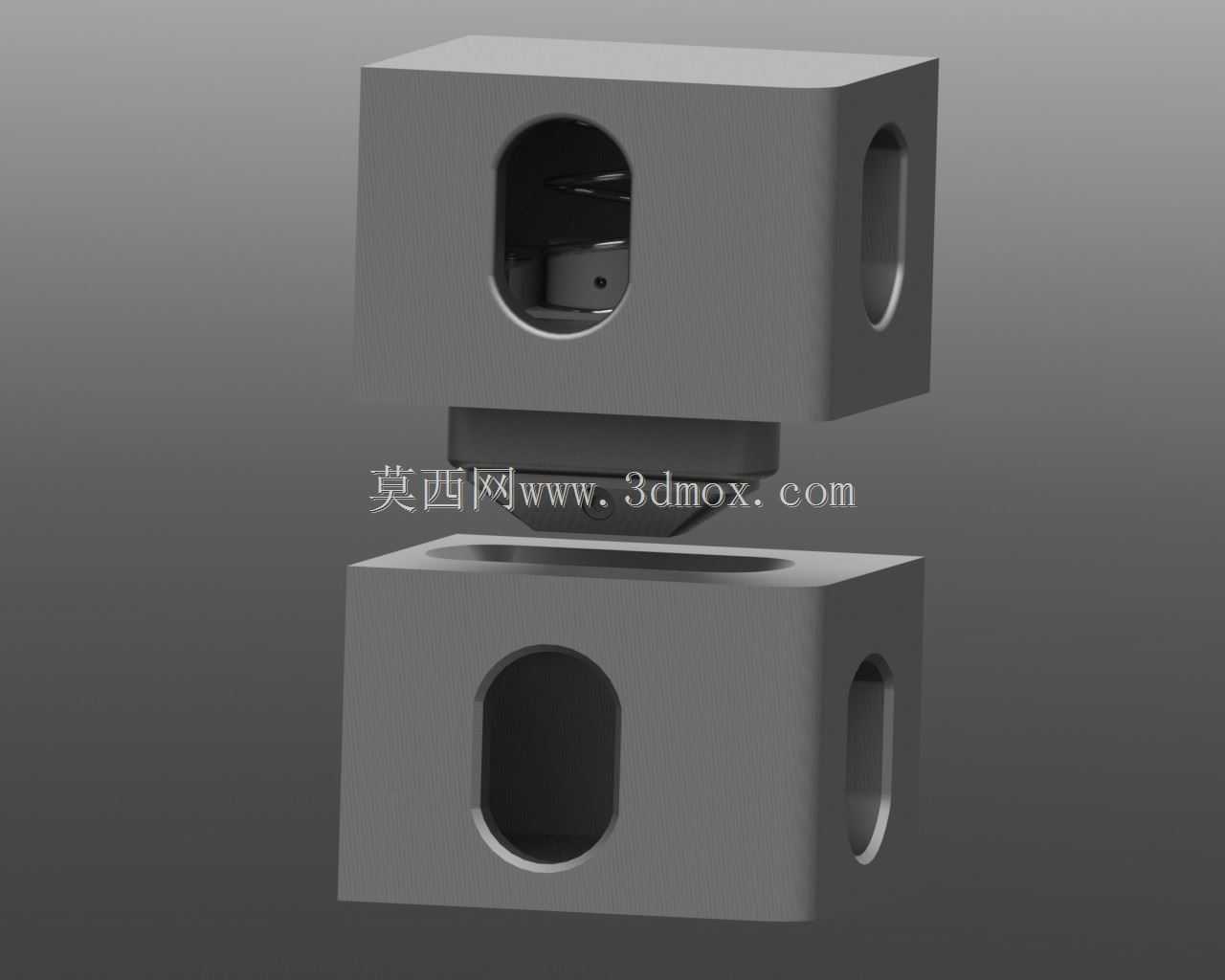

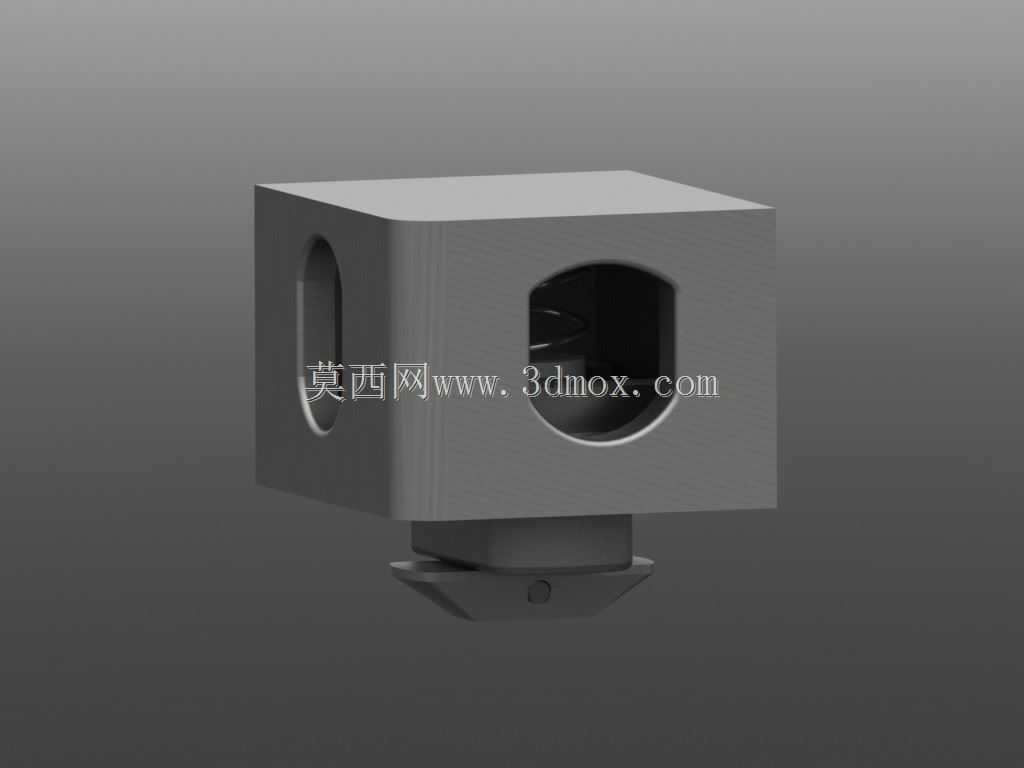
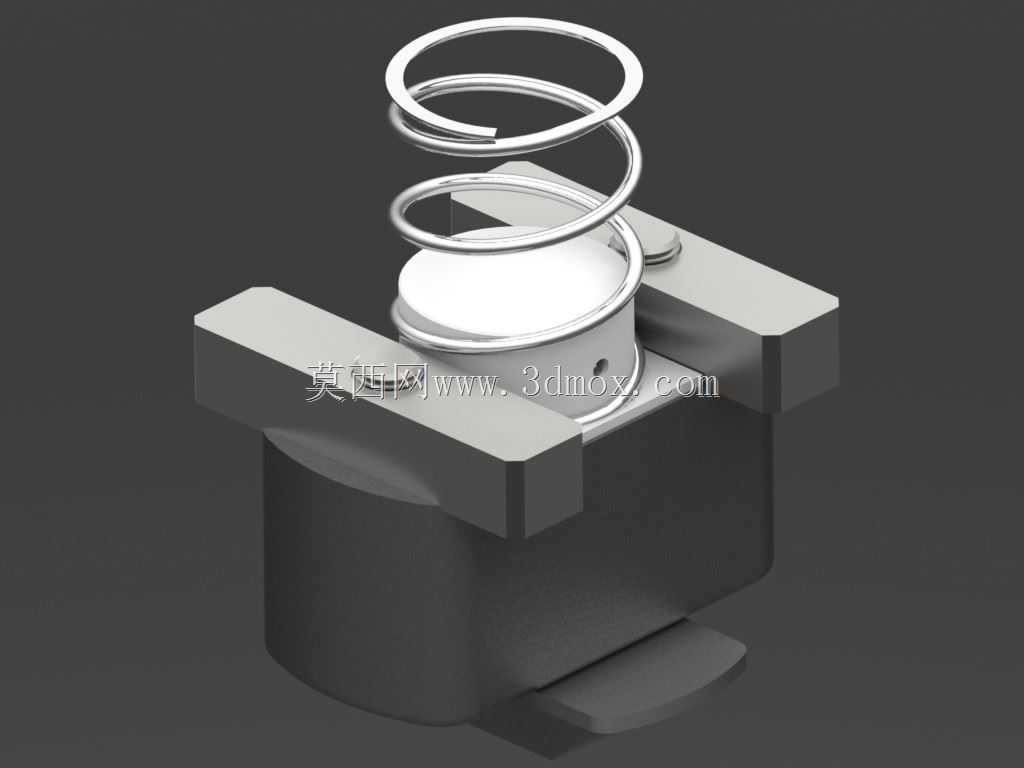



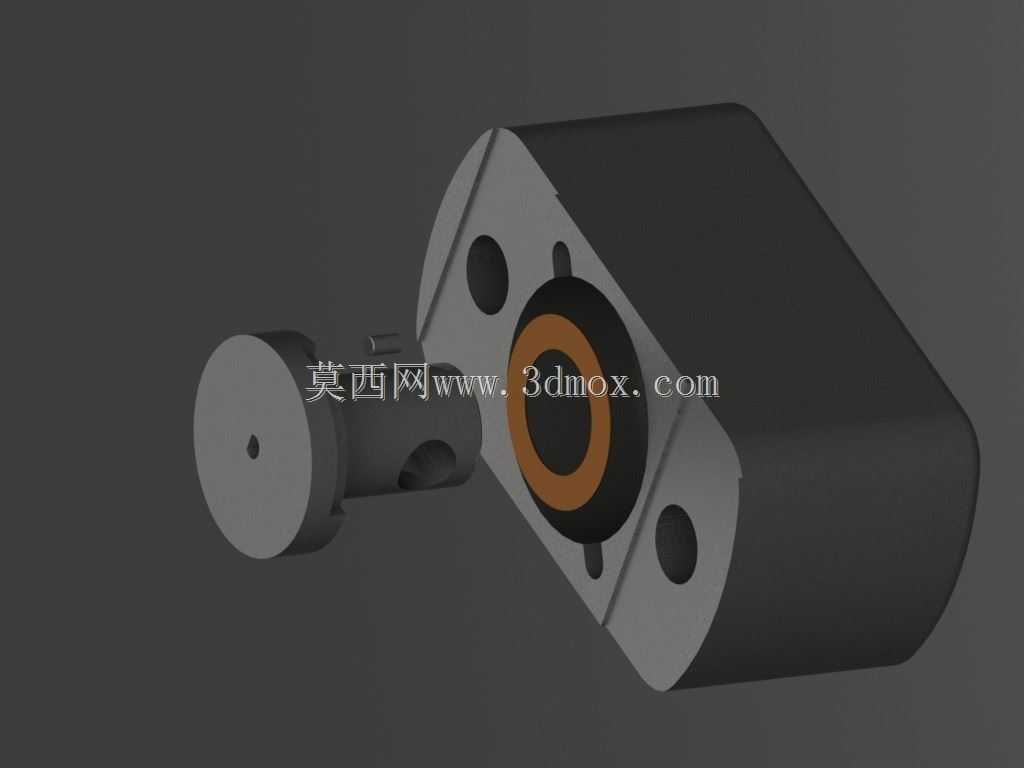
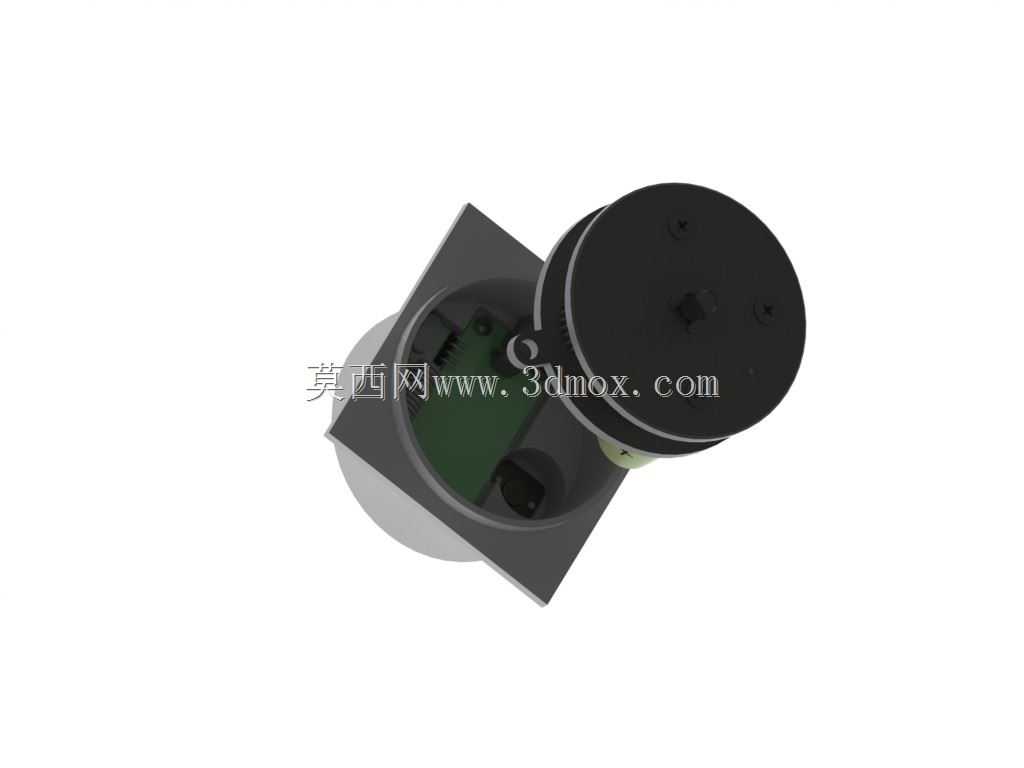
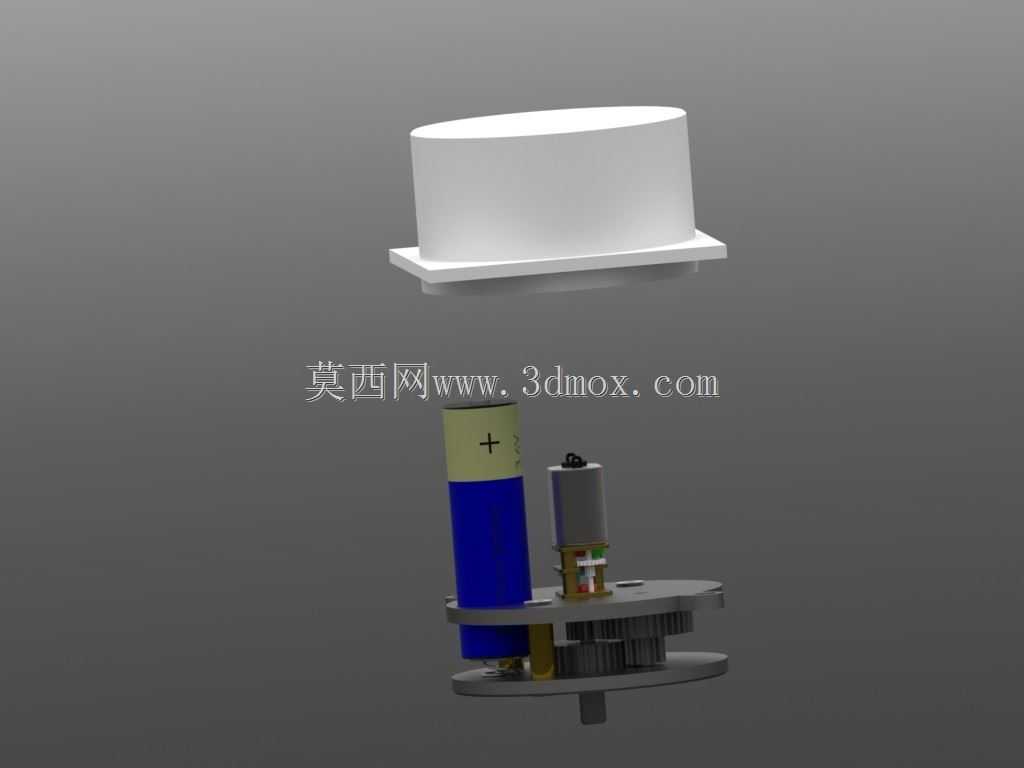
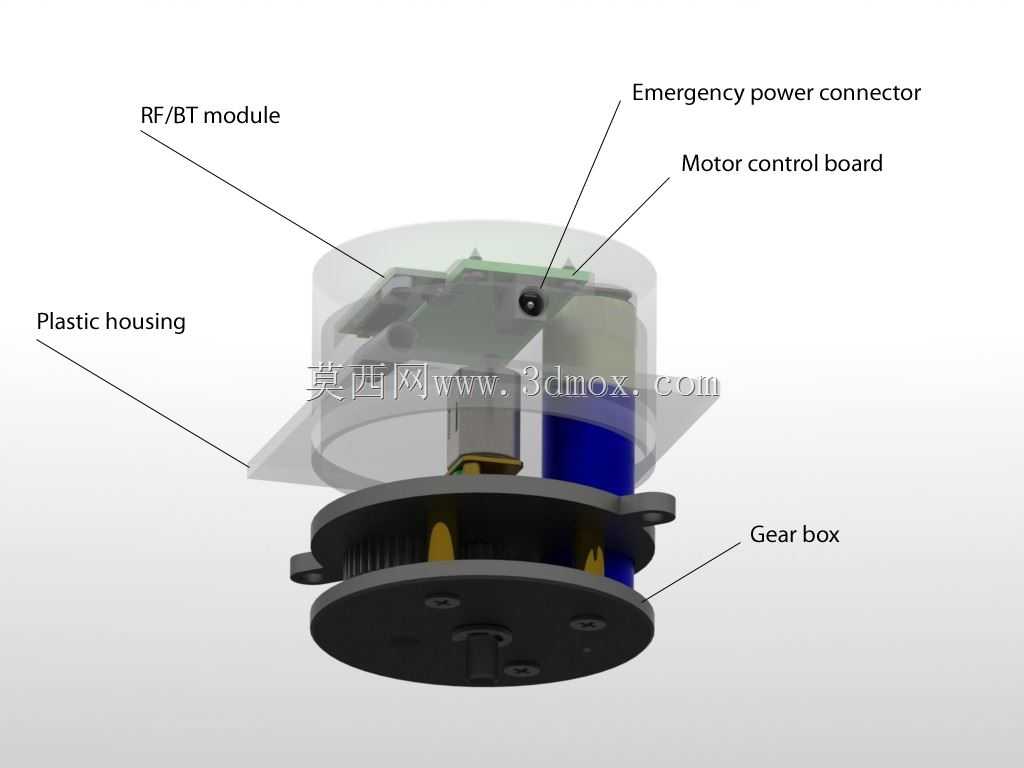


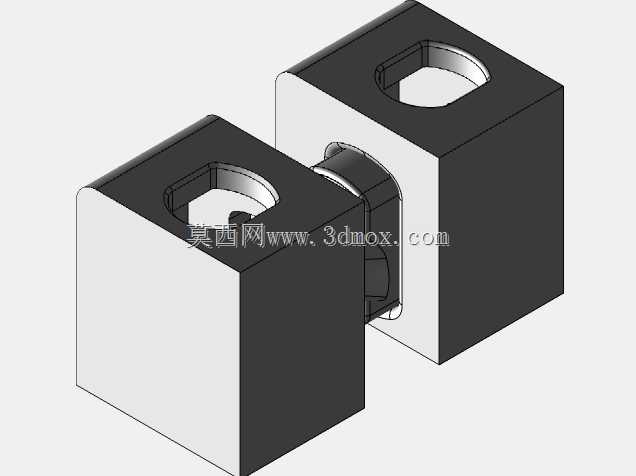
所提出的机制是远程操作的,就像在我以前的项目“遥控自动扭锁”(阅读详细信息)和它使用相同的控制系统有一些变化。这种锁机制是为了安装在底部角落的集装箱,并消除了以后拆卸的需要。锁的基础是一块锻合金钢,它通过压缩上下移动弹簧连接在方角的端面和内顶面之间。在扩展位置(原位),安装在下一个集装箱上,在压缩状态(末端),当运输集装箱放置在地面上时,与铸造方角表面对齐。控制机构位于底座内部,由一个小型直流齿轮电机组成,高度降低,扭矩高,扭锁旋转90度。在以前的项目中,它使用相同的电机规格:N20齿轮,额定电流60ma,3v。电池还是亚硫酰氯锂(Li-SOCl2)3.6v 2.4Ah长效电池。锁定/解锁位置是无线完成的。用于同时配对/编程的锁定/解锁4个扭锁系统,使用单钥匙链遥控器或手持设备。如图所示为遥控器,按“A”键旋转90度至锁定位置,按“B”键旋转90度至原位解锁位置。关于无线通信,有可能使用价格便宜的rf433mhz模块,并使用小型车载遥控发射器,工作距离可达50-100米。蓝牙模块是另一种选择,它使用手持式/智能手机/平板电脑设备以及专门为所需目的而创建的控制软件,有可能增加一个按钮(旁边的直流接头)手动操作的机制,不需要无线发射器/接收器。直流接头是优雅的解决方案,电力电子电池时,电池耗尽,另一种解决方案是手动转动扭锁pdate:As posible 轴锁连接解决方案,作为设计中的薄弱环节,在两部分之间增加了压装连接和焊接。轴内的孔直径也较大,用于轴润滑
标签:


- 模型大小 :71.96 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,STEP / IGES,Rendering,STEP / IGES,Rendering
























