Nober arduino机器人

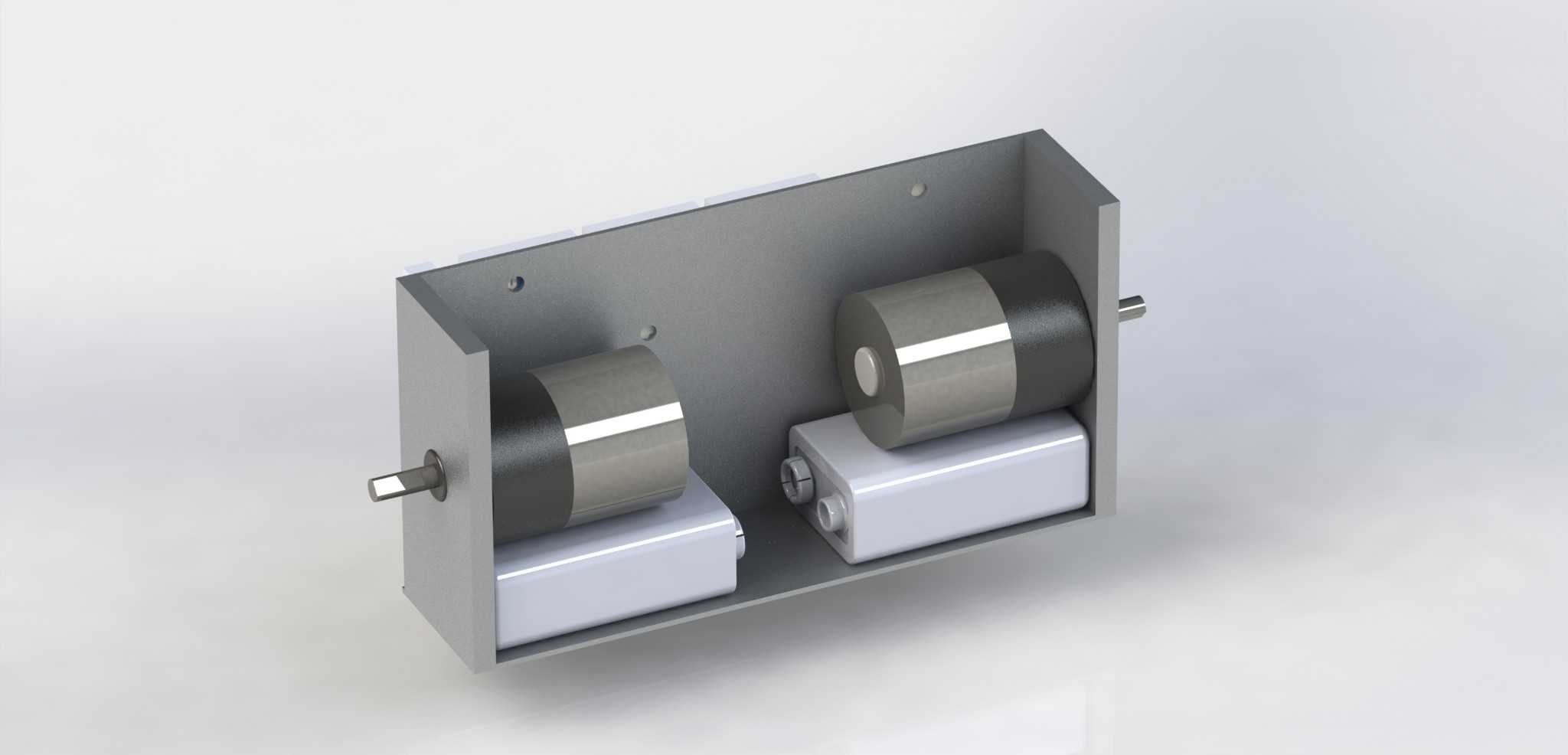
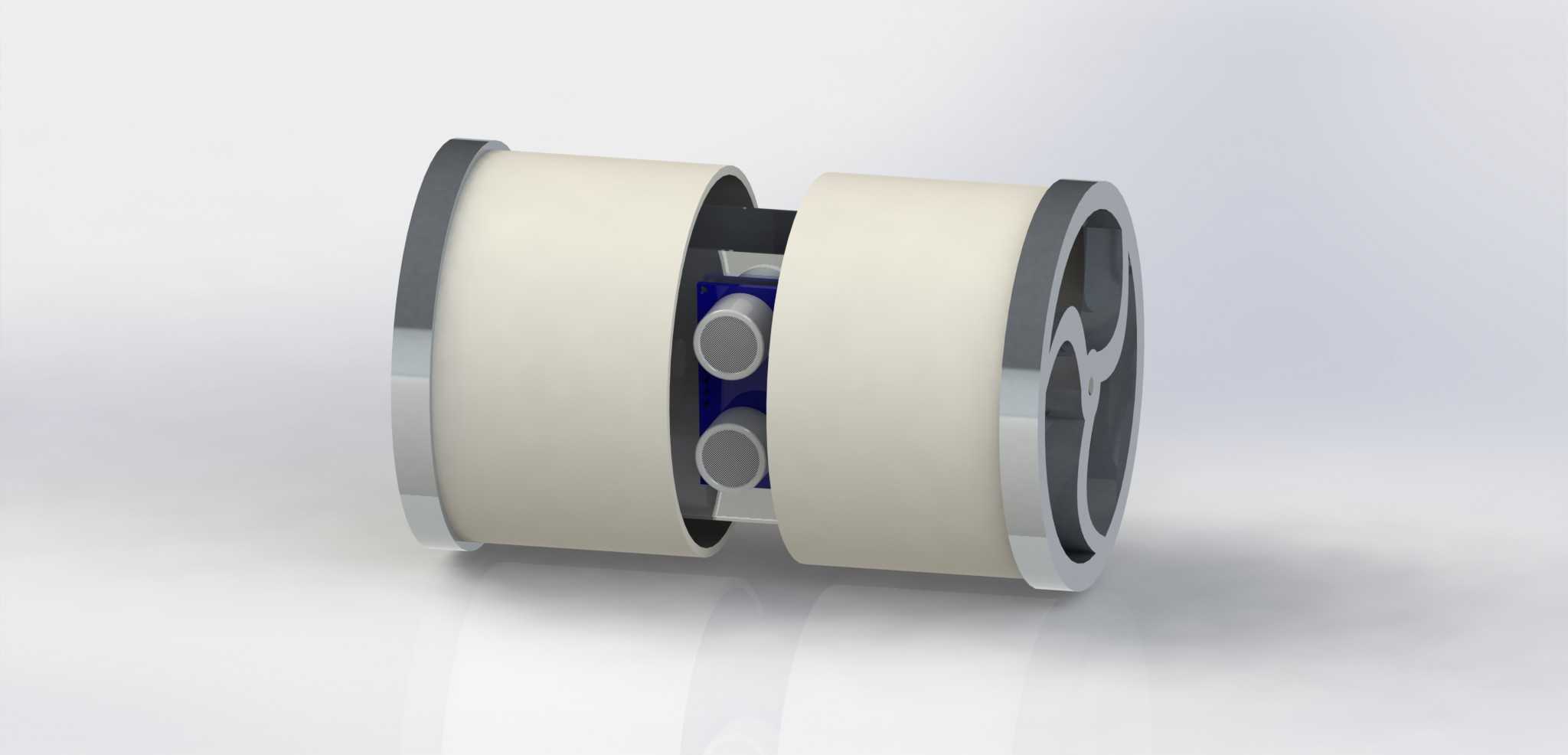
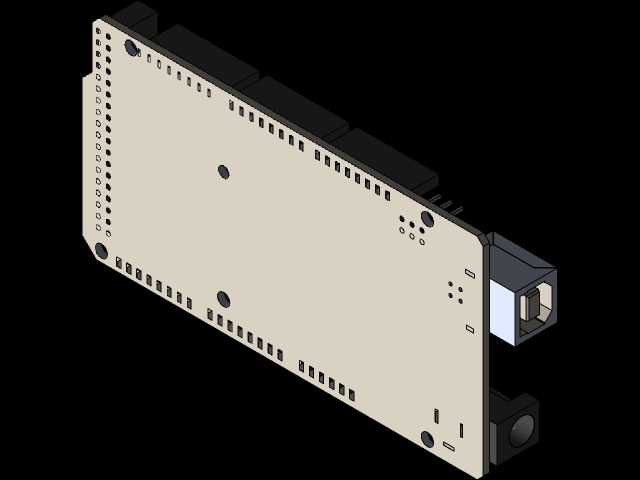
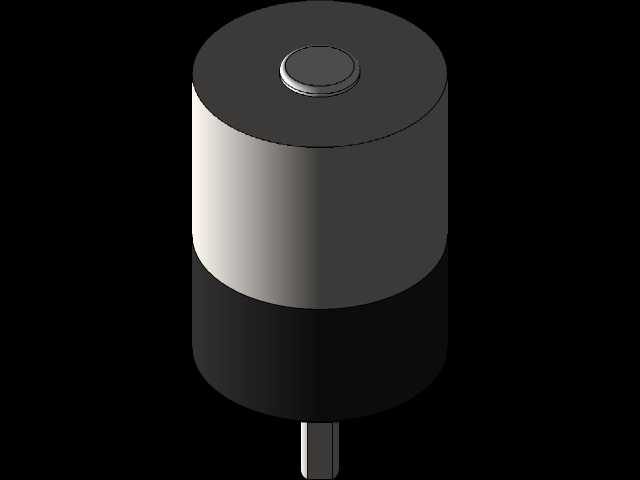

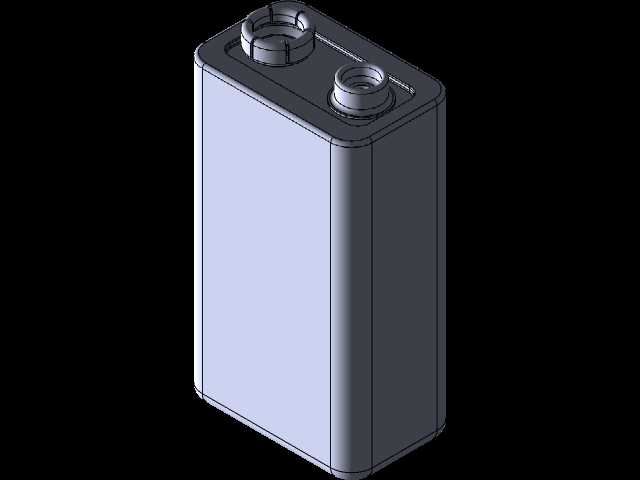
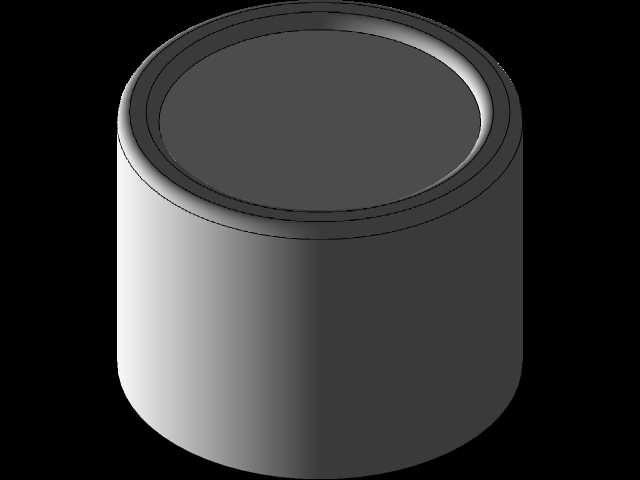
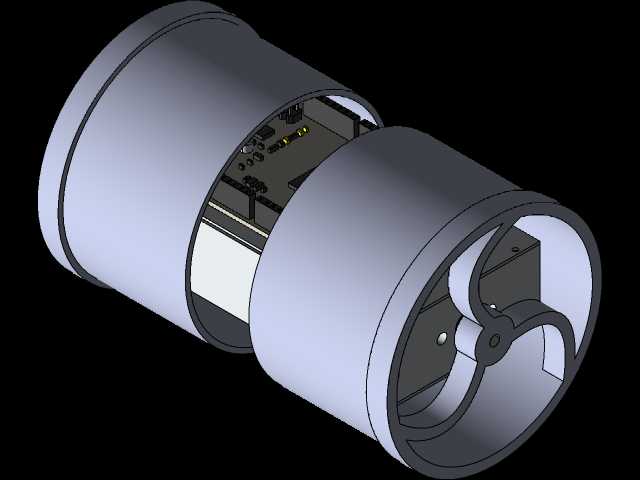
这是一个初学者机器人不能做太多的事情,只能开车四处躲避artlist:sensor:HC-SR04电机:L149.12.10μcntrl:Arduino Mega 2560电池:PP3 9v电池桥:还没有决定是不是电池就像一个平衡器,使重量下降的情况下,所以它一直保持垂直。我很快就会为我的学校项目打印出这个机器人,看看它能平衡得多好。也许我需要把更多的重量在底部,或者我可以使它不会这么快发生
------分隔线----------------------------

说点什么吧
- 全部评论(0)

还没有评论,快来抢沙发吧!
- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,Rendering,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,Rendering,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS