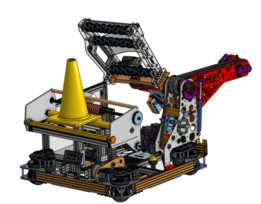
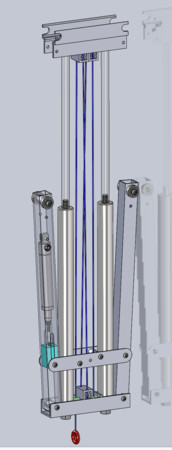
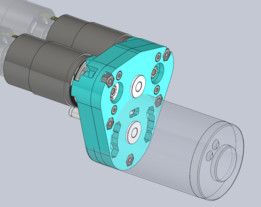
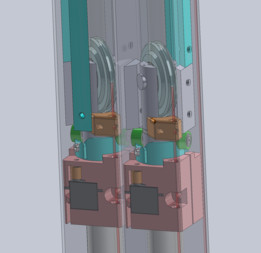
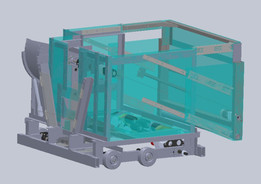
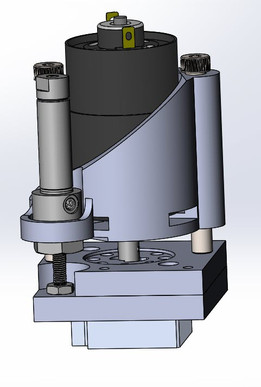
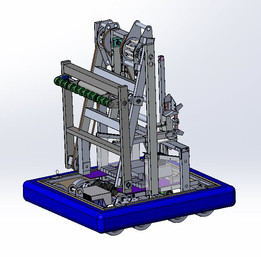
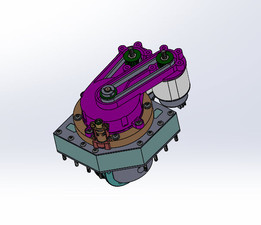
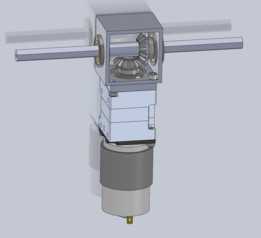
90度万向传动-斜接齿轮设计
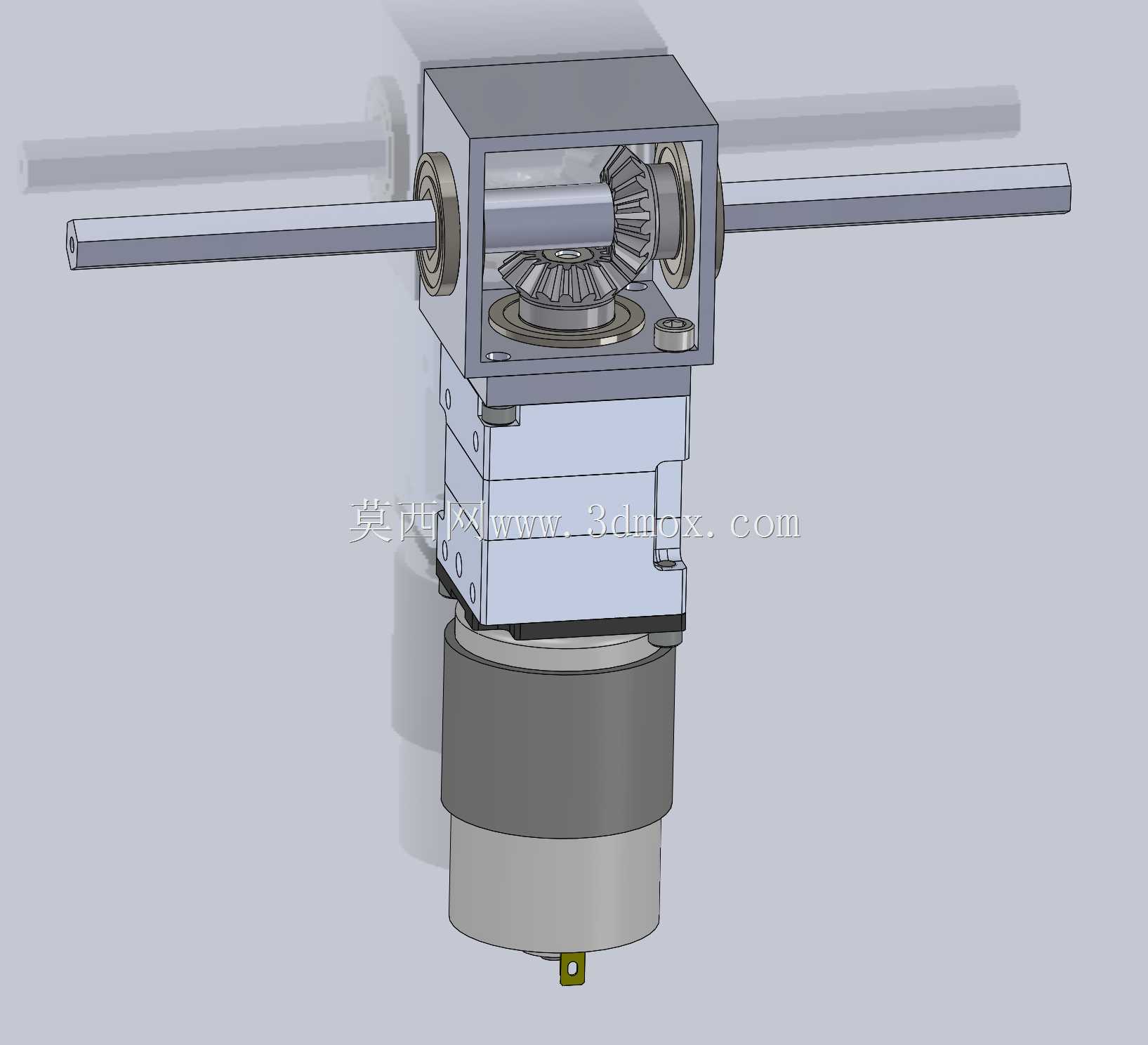
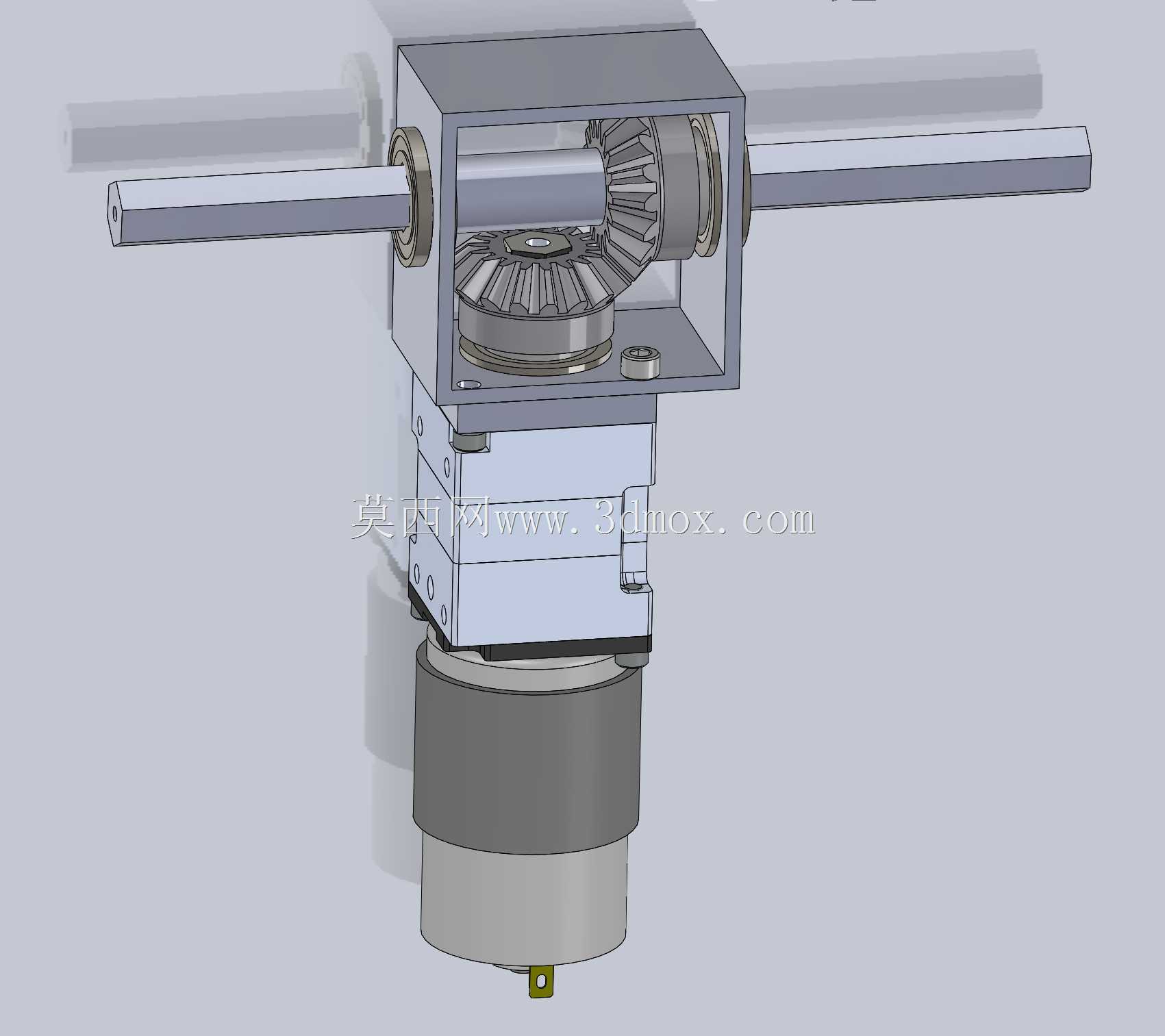
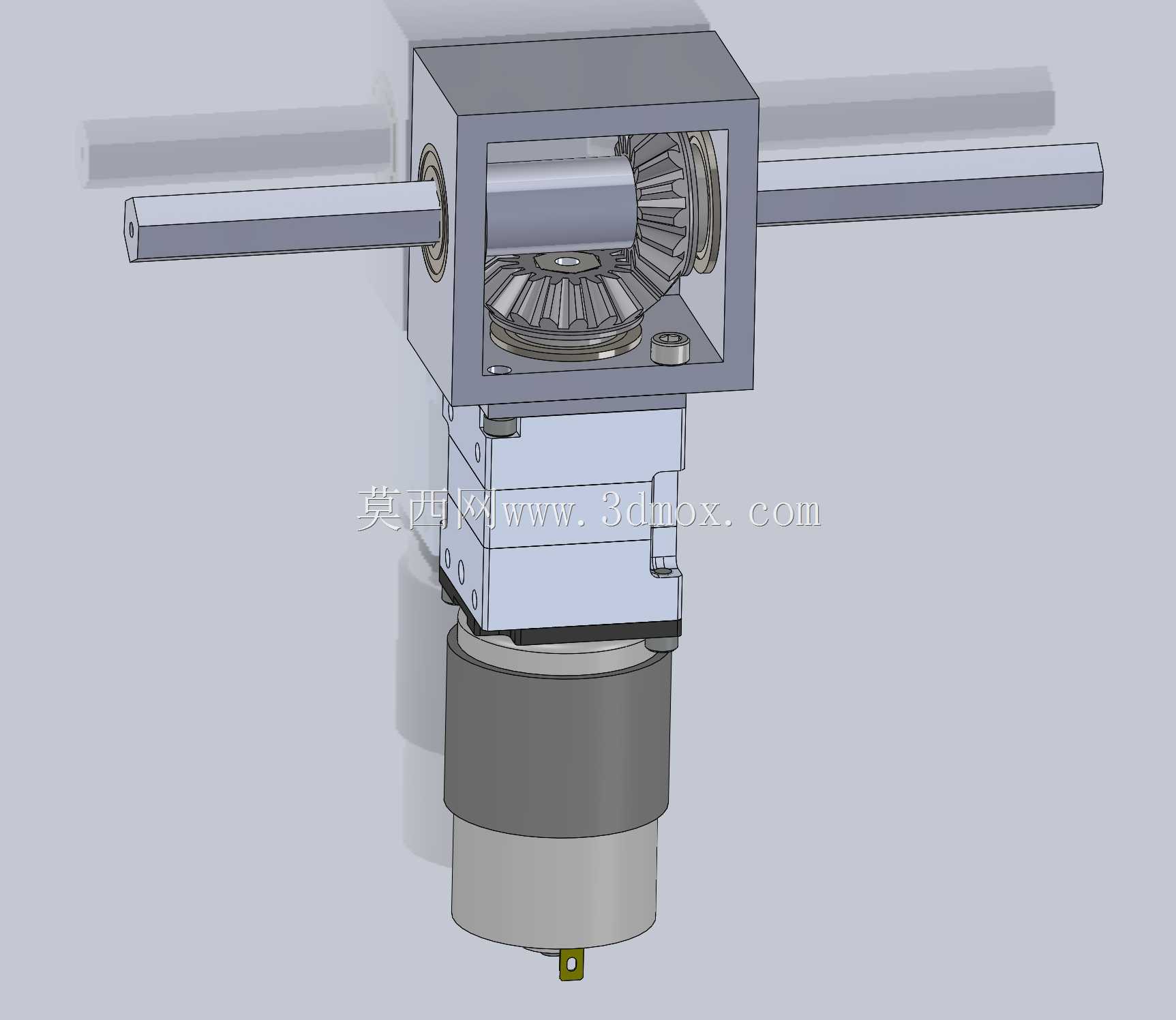
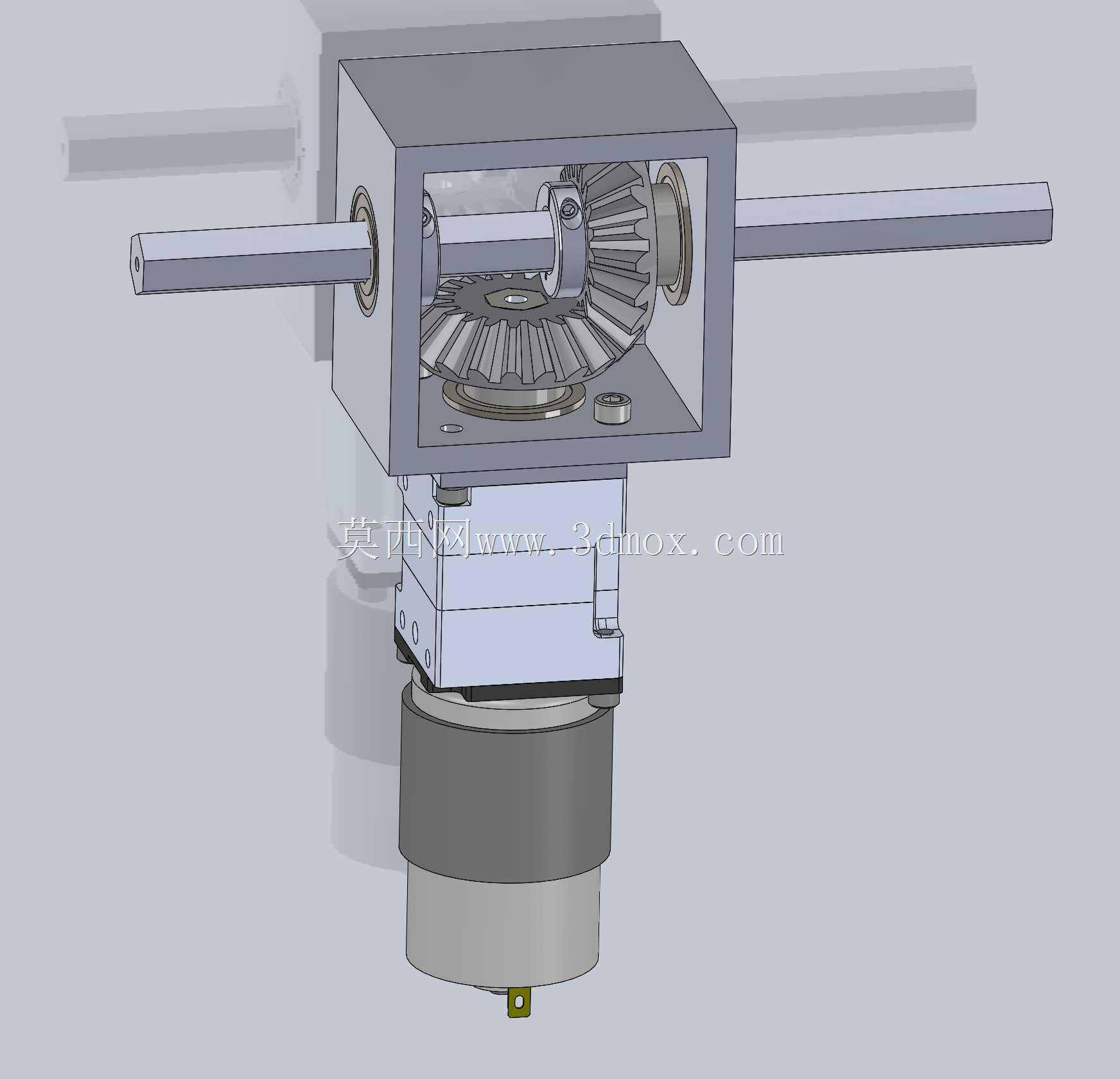
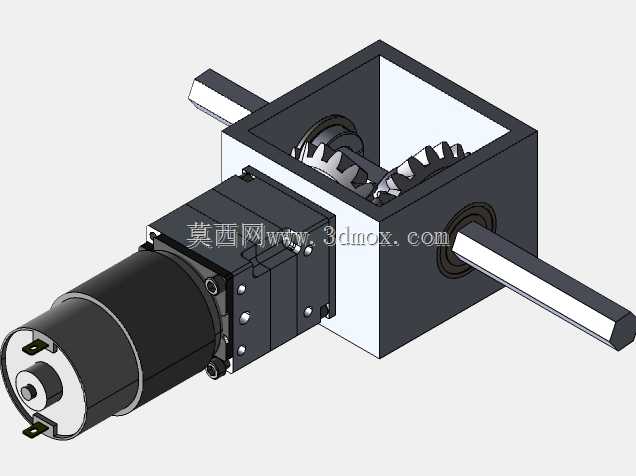
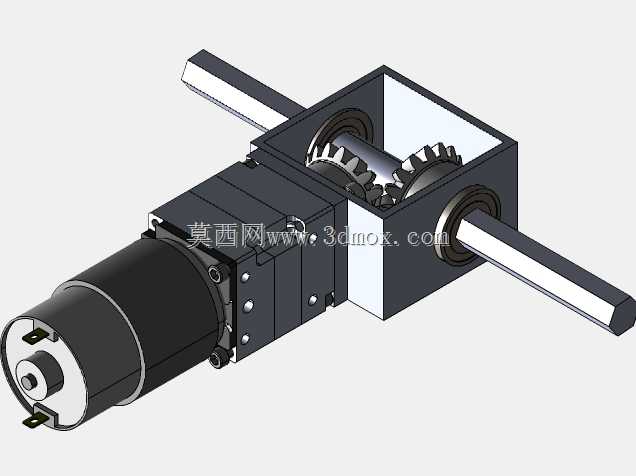
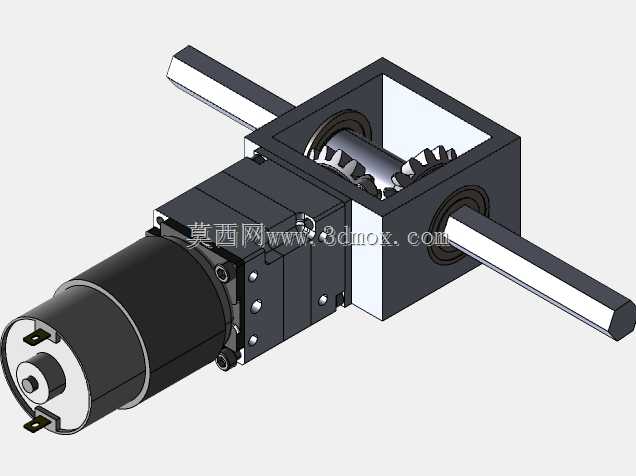

Vexpro VersaPlanetary4的90度驱动。每个都使用不同的马丁斜接齿轮(每个可从麦克马斯特获得)。轻型-16T@16DP (保守est 10:1比率,775Pro输入)2X2方管中型18T@12DP (保守估计30:1的比例,775Pro输入)2.5X2.5平方管(这种口味的两个副口味薄和厚――厚明显更强)重型20T@10DP (保守est 65:1比率,775Pro输入)3X3平方tubeNote保守估计值可能是真值的2/3(可能安全使用1.5-2倍)。此外,麦克马斯特出售未硬化的牙齿,硬化的牙齿(马丁制造的)将提供另外1.5-2倍的配给。为圣诞节重新设计!在构建其中一个的基础上,在此re中进行了一些更改/改进-release:- fixed 一些尺寸和粘性问题-简化了外壳(放弃了一些齿轮的倾斜控制,但基于第一个样品,这不会是一个问题)而不是简单的制造-包括图纸的住房和齿轮修改(更像草图,但信息有)-做了一个厚和薄的中间版本(18T12DP齿轮)-齿轮是一个野兽。我很惊讶在你手里它有多结实。我怀疑,有了厚厚的住房,它将几乎牢不可破――或者说,它将不是最薄弱的环节,副总裁将首先失败。只是直觉,但是…-拆下最大齿轮型号(20T10DP齿轮)的盖,使壳体更厚。我很有信心,这个变速箱将比副总裁更强大。我希望你喜欢这个设计。更新:2016-12-08A解决了很多棘手的问题。首先,20T10DP齿轮的改性长度是错误的。还有,运动工业公司提供的马丁齿轮的硬化齿~50%的成本上升,但值得16T16DP 3/8“孔硬化齿=每个HM1616$37(相对于麦克马斯特6529K11$22)--18T12DP 1/2”孔硬化齿=每个HM1218$48(相对于麦克马斯特6529K17$31)--20T10DP 1/2“孔硬化齿=每个HM1020A$61(相对于麦克马斯特6529K23$43)Joe J。原生CAD文件在Solidworks中--使用配置可以轻松地在设计选项之间切换。所有文件都在PackAndGo Zip文件中。JJUPDATE 2016-12-22:阿图尔指给我看马丁的这张桌子。http://www.martinsprocket.com/docs/default-source/catalog-gears/miter-gears.pdf?sfvrsn=14They 每个斜接齿轮都有HP额定值。利用这个,我可以得到一个最大有效比率(由Martin推荐――这将是相当保守的)。这是我想要的get:ONCE AGAIN,让我强调一下,对于第一个机器人来说,这些数字是保守的,但这是一个很好的参考点,而且很容易。YMMV.使用10RPM数字(有效失速)=~1Rad/secBig gear HM1020将为0.05HP=37Watts=37N-m,因此最大有效比为50:1(37N-m/0.71N-m失速扭矩)。我得到类似的数字使用50RPM大齿轮HM1020:0。3HP@50RPM =223W@5 Rad/秒=>;43N-m=>;最大有效传动比60:1Mid齿轮HM1218。002HP@10RPM =15W@1 Rad/sec=>;15N-m=>;最大有效传动比20:1Mid齿轮HM1218。015HP@50RPM =112W@5 Rad/秒=>;21N-m=>;最大有效传动比30:1小齿轮HM1616 0。02HP@25RPM =15W@2.5 Rad/秒=>;6N-m=>;最大有效传动比6:1小齿轮HM1616 0。04HP@25RPM =30W@5 Rad/秒=>;6N-m=>;最大有效比率8:1其他注意事项。***这些是为775Pro提供的,但并不总是这样。***这些数字使用的是有效比率而不是实际比率。我会在VP上使用80-90%每个阶段,例如,如果你使用(3)5:1的比率,你会有一个125:1的实际比率,但在考虑效率后,有效比率在70:1和90:1之间。***最后,让我再次强调一下,对于第一个机器人应用来说,这些数字是保守的。***许多FRC成员熟悉的Vex 15T 12DP齿轮,假设齿变硬了,也可以放在马丁的桌子上。HM1215 0型。1HP@50RPM =75W@5 Rad/秒=>;14N-m=>;最大有效比20:1


- 模型大小 :110.94 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,Other,STEP / IGES,STEP / IGES,Rendering,STEP / IGES,Other,Rendering,Other,Other,Other,Other,Rendering,Other