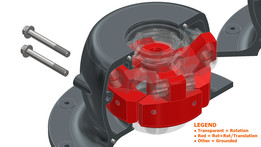
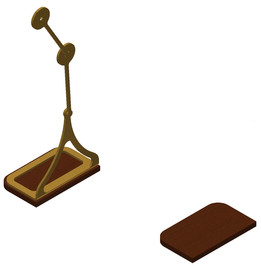
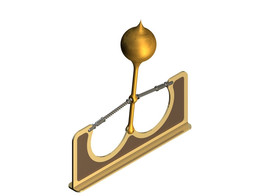
经典擒纵机构-反冲(普通)

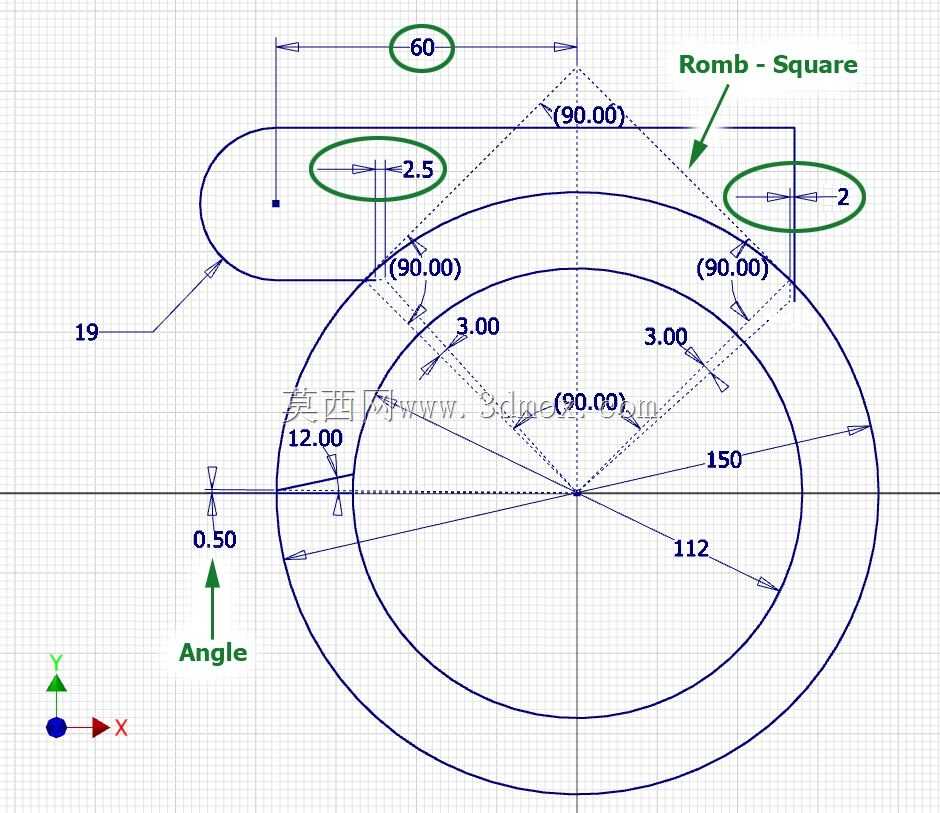
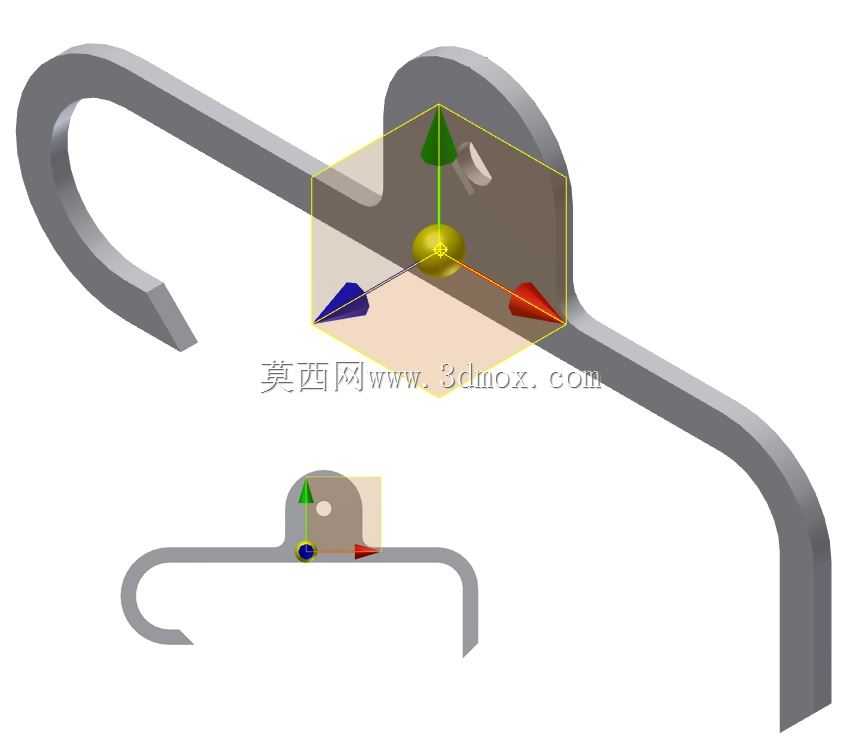



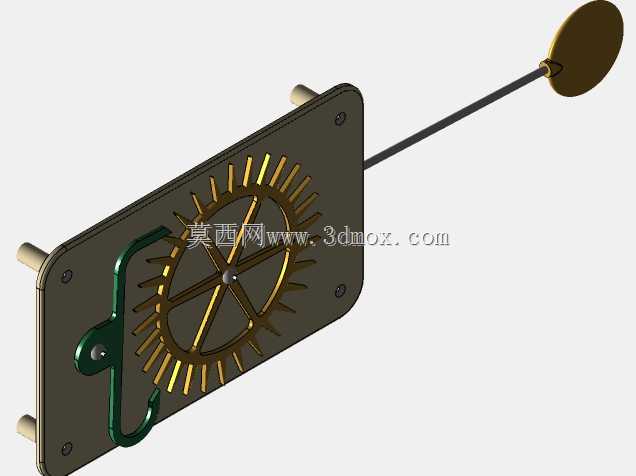





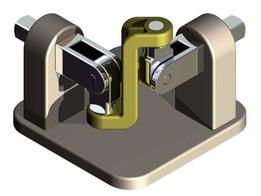
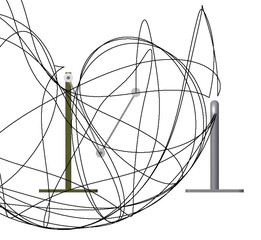
这个项目是基于书钟表擒纵力学马克五。海德里克(版权所有1997年)作为一个良好的来源。这本书是公开的(http://www.nawcc-index.net/Articles/Headrick-EscMechanics.pdf),所以你可以阅读和比较(与书)我在这里提出的一切。实际上,你可以用我的项目作为理解这本书的精确模拟。我建议你下载这本书,以便在电脑脱机时使用。所有零件、部件和仿真/动画都是使用Inventor 2014制作的,因此一些特定的参照会绑定到此软件。从这本书中你可以了解到,有三种经典的擒纵机构:格雷厄姆(死拍)、反冲和瑞士杠杆。我以前的项目介绍了格雷厄姆(死拍)擒纵机构,现在我介绍了反冲擒纵机构。本书第16页对此项目进行了解释。与格雷厄姆擒纵机构的区别在于,车轮也有向后运动,而不仅仅是向前运动。这是因为调色板的左臂没有任何积极的作用――给摆锤提供能量――而是推回轮子。这种效应可以解释为一种反冲,就像有人将时钟的弹簧卷起来一样,不是吗?这样一来,摆锤的一小部分能量就会返回到卷轴上。问题是由于后向运动难以控制而导致精度下降。后坐力擒纵机构有一些变体。这里介绍了最常见的一种,托盘看起来像一个弯曲的酒吧。该机构的设计是基于格雷厄姆(理想)擒纵机构的设计,如本书第16页的图片所示。包括在我的项目是“基本素描.jpg”的图片。在这里你可以看到格雷厄姆(理想)设计的活动线的重要的一半-尺寸3°. 书中写道:“稍微缩短入口托盘,稍微向外移动出口托盘,平行于格雷厄姆出口托盘的脉冲面”。进入托盘是左臂,退出托盘是右臂。“轻微”缩短和移动的尺寸分别为2.5 mm和2 mm。创建了托盘,您可以看到质量中心有点偏心(经典的擒纵-反冲(Common)-palete.jpg)。为了减小偏心率,左臂的特征尺寸减小到60 mm。同样,如果使用Inventor(2014、2015…),通过输入环境/动态模拟,可以设置以更改系统的工作方式。例如,可以将施加在捡拾盘上的扭矩从6 N mm更改为另一个值。也可以将杆的长度从400 mm更改为400 mm。观察发生了什么,并尝试其他值,直到你得到一个稳定的,均匀的运动,摆了很长一段时间here:Rudimentary: https://youtu.be/pOie2rMdN6k (小反冲)入口下降专业调整:https://youtu.be/Q6hC31fEN2I (明显的反冲)


- 模型大小 :5.96 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,Autodesk Inventor,STEP / IGES,Autodesk Inventor,Rendering,Autodesk Inventor,Autodesk Inven