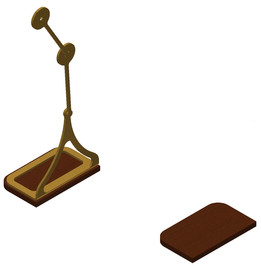
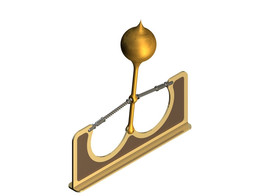
经典擒纵机构-格雷厄姆(BHI)

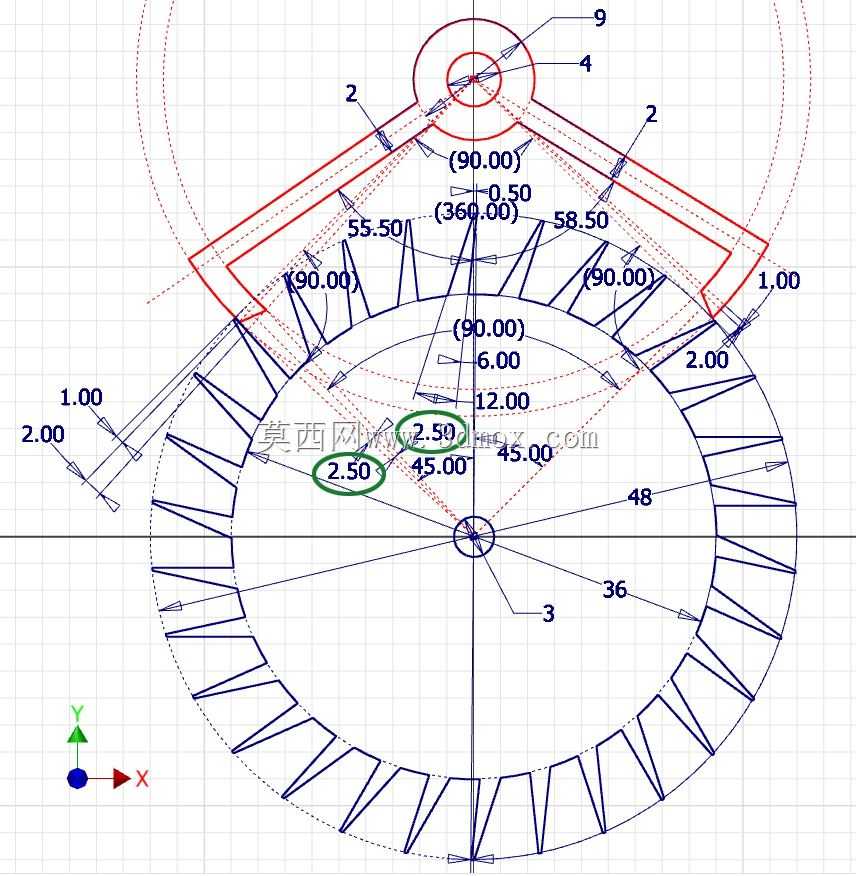





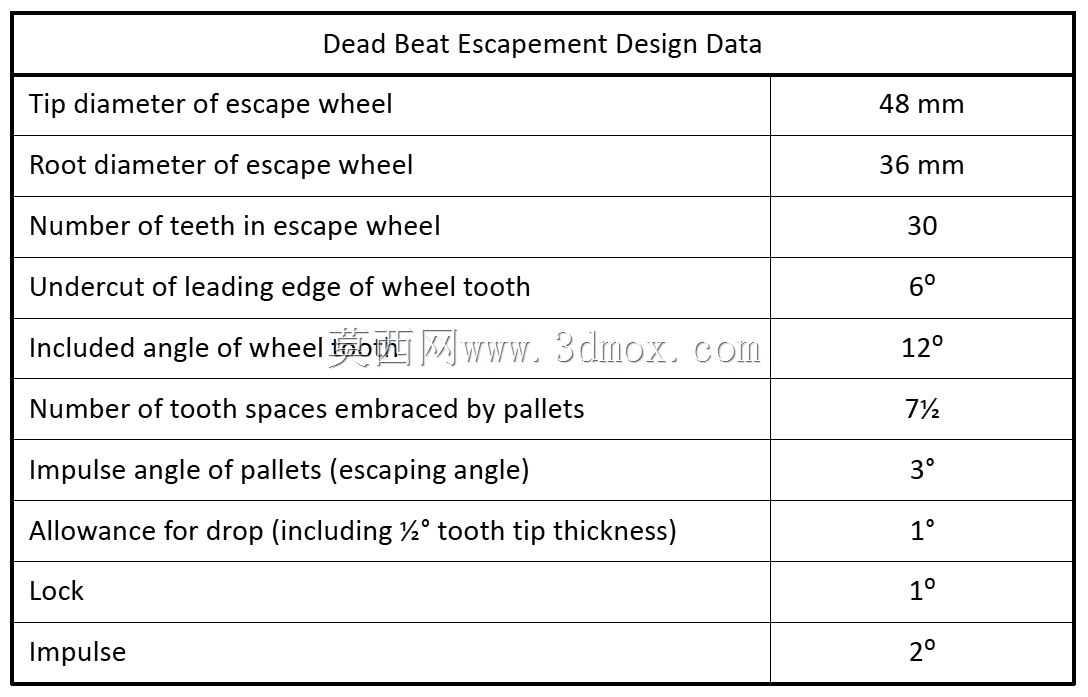
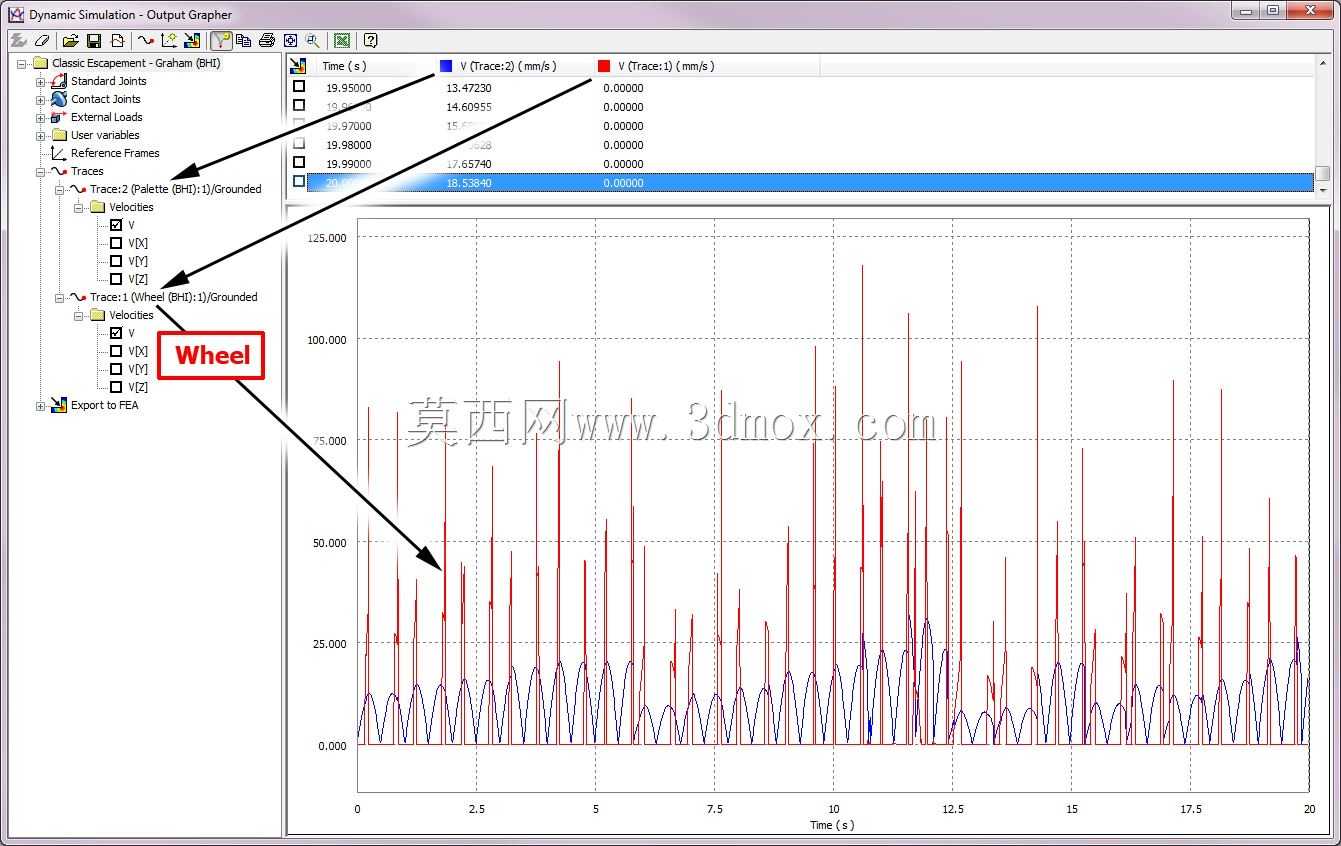
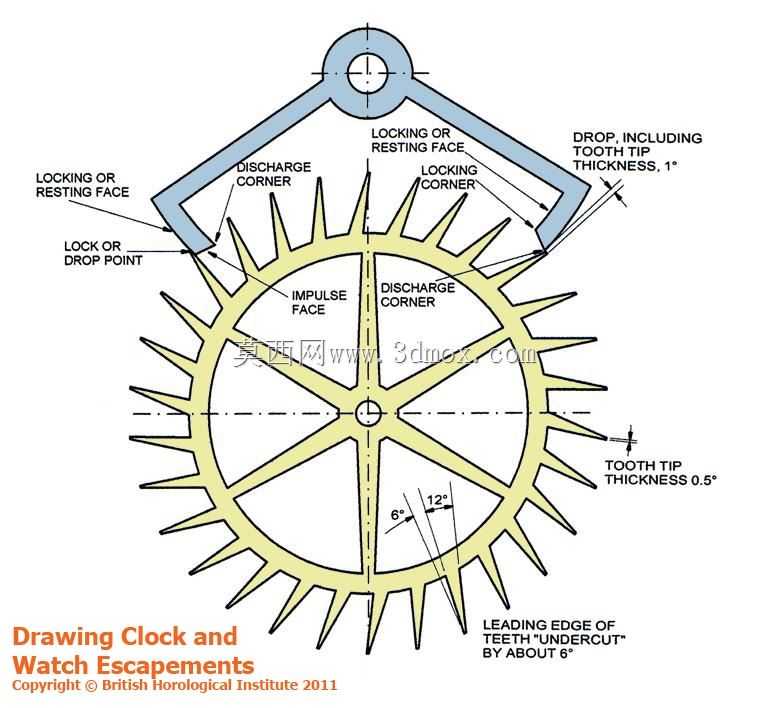








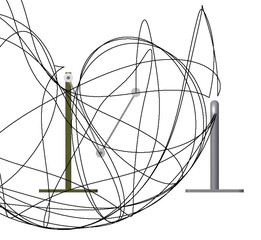
这个项目是与我以前的项目经典擒纵-格雷厄姆(理想)和(修改),所以你需要从那里学习地面信息。BHI代表“英国钟表研究所”。在发布了经典的擒纵项目后,我找到了很多新朋友。其中一位是来自台湾的郭健。他是许多擒纵机构模拟的了不起的作者。通过在Youtube上查阅他的作品来说服自己,下面是一个例子:https://youtu.be/D9UT6YwzmBU?list=PLqpsFd32qXg7H2MJ9fWJVfvUHX_Zvtxdn. 通过阅读第一个数据(圆形托盘无差拍擒纵机构),我们现在了解了逃逸角,锁脉冲等术语,不是吗?更重要的是,通过阅读同一个项目的描述,你可以了解到很多关于死节拍逃逸,与罚款参考。例如,乔治・格雷厄姆(George Graham)生活在1673-1751年间,他的绝活发明于1715年问世。霍肯(Ken hou)向我们推荐了一本英国钟表学会(British horrology Institute)的书作为参考。题目是《绘制钟表擒纵器,远程学习课程》,作者大卫普尔,FBHI 2011-http://bhi.co.uk/. 你可以在这里阅读更多关于这本书的内容:http://bhi.co.uk/training-education/distance-learning/After 仔细研究了BHI的书,我决定制作我的“格雷厄姆擒纵机构(修改)”的另一个版本。此版本使用BHI手册中的信息。我敢在盘子的表面加上一个希腊主题――为了好玩,事实上……当你决定创造一个精确的机械擒纵机构时,你必须选择格雷厄姆的死节拍擒纵机构。其余的细节与我提到的项目类似(理想的和修改的)。然而,由于我们所做的一切只是为了好玩,一个通知可能是有用的。我的擒纵机构项目的所有剪辑(视频)都呈现从起点开始的运动,而不是移动部件当前的稳定运动。起始力矩是非常重要的,因为我们想知道机械装置是如何克服惯性而达到稳定运动的。如果使用Inventor,则可以更改运动仿真的设置,甚至更改零件的尺寸,以查看产生的移动的敏感程度。例如,当杆长250 mm时,1 N mm的扭矩似乎是合适的值。更改一个或另一个值(或两者都更改!)你可以看到系统如何停止或摆幅变得太大。此外,摆锤的起始斜率也很重要,也就是说,卷绕后,摆锤以中等斜率发射,必须在短时间内使机构稳定运动,由于我没有钟表方面的专业知识,我肯定我没有为所有参数选择合适的值,您一定会注意到,如果您研究图片“Output Grapher(20s).jpg”(请记住我以前项目中的A点和B点)。如您所见,蓝色图形(对应于调色板,即钟摆)表示非均匀的最大速度。对于一个专家的眼睛,这是不好的!对不起,我没有时间再搜索来修复这些异常情况。幸运的是,你拥有所有的数据来为自己或告诉我们…享受吧


- 模型大小 :7.14 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :Autodesk Inventor,STL,Rendering,STEP / IGES,Rendering,Autodesk Inventor,Autodesk I