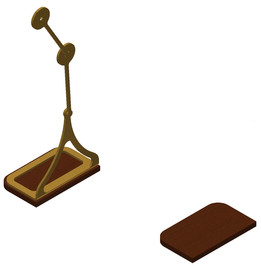
经典擒纵机构-格雷厄姆(理想)


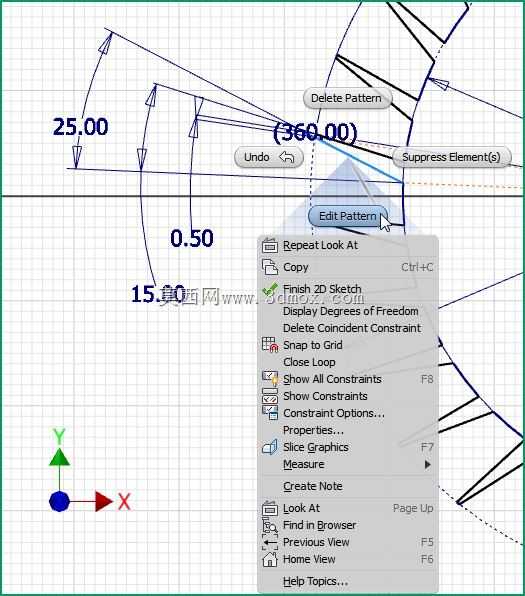
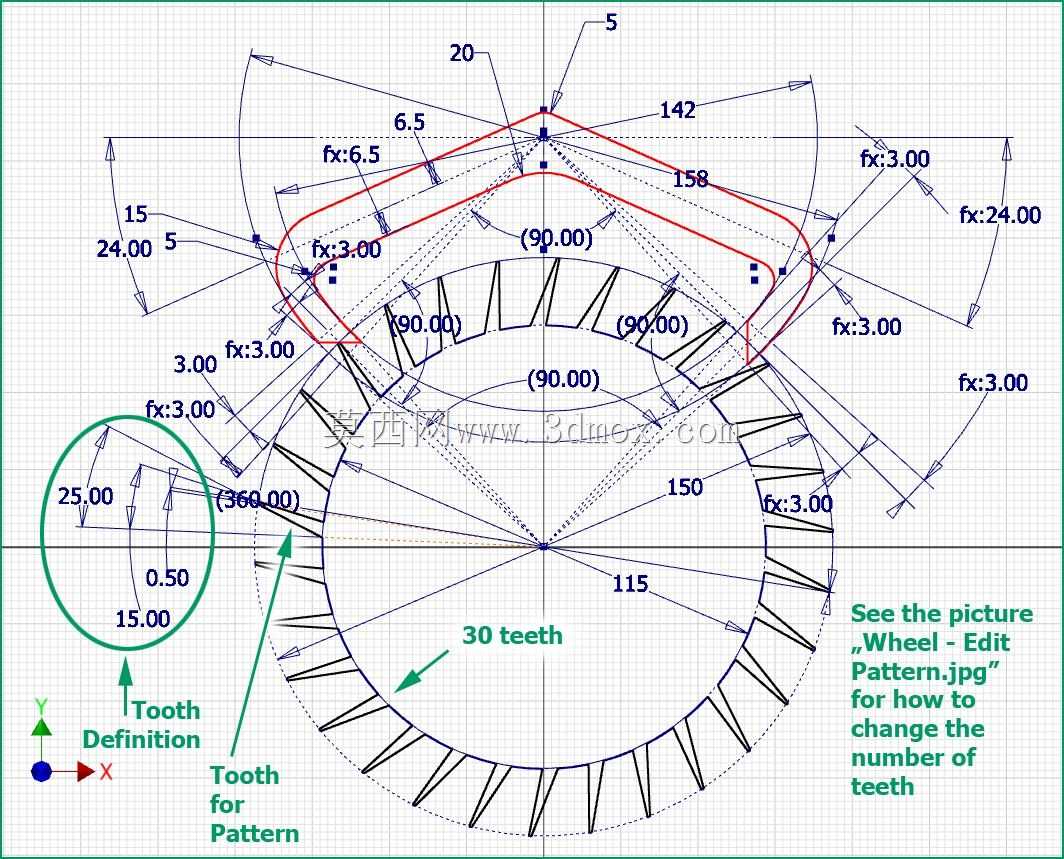
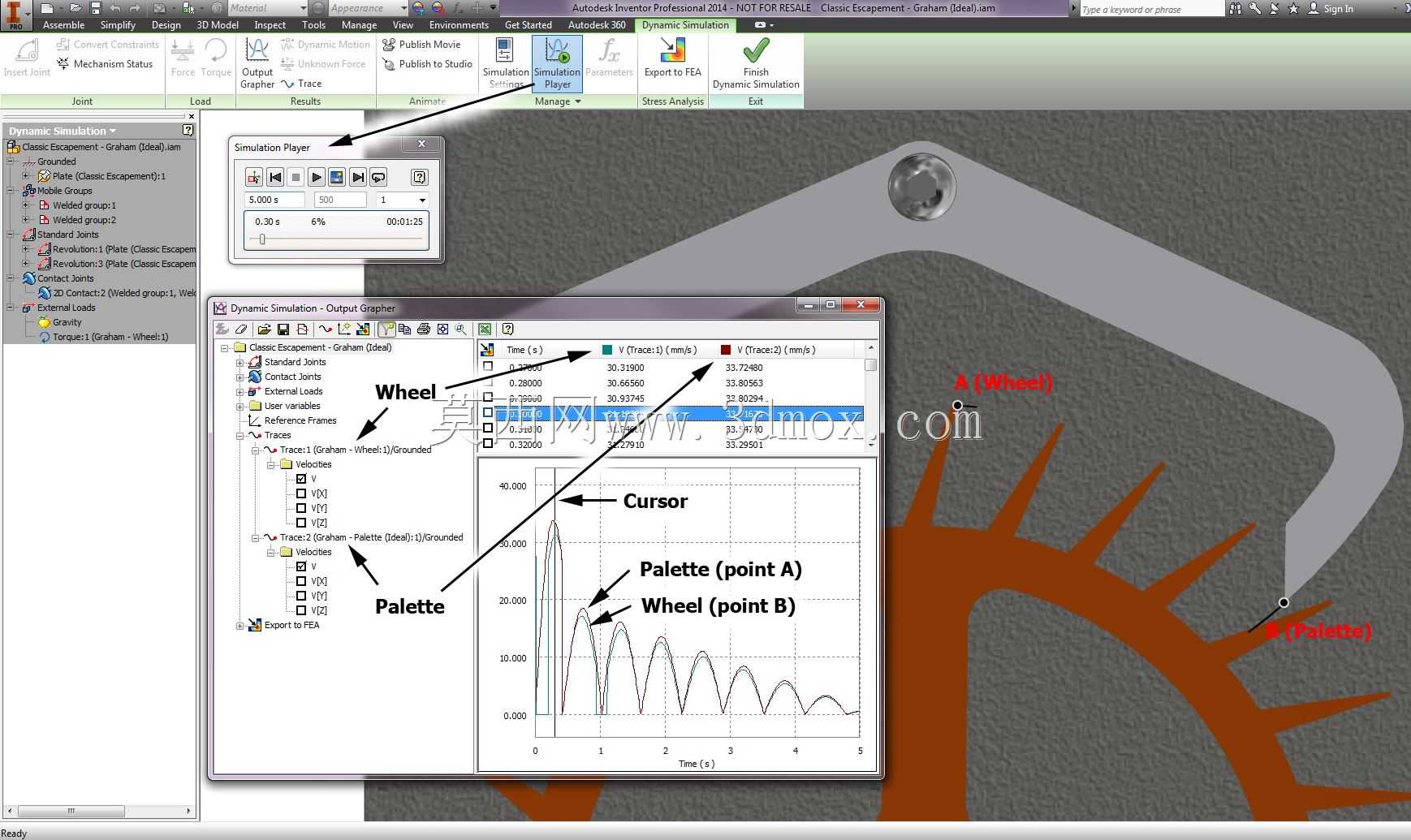


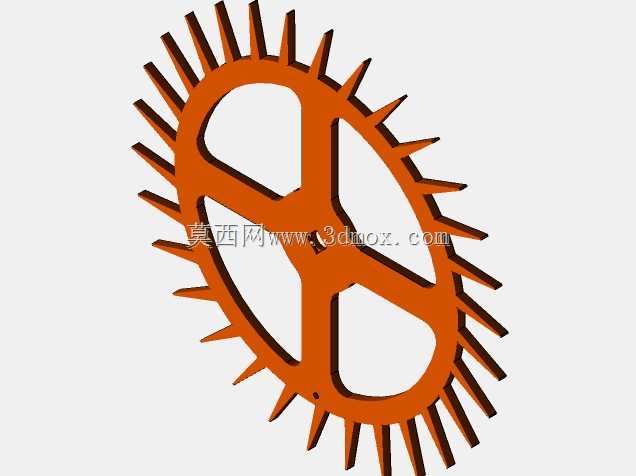




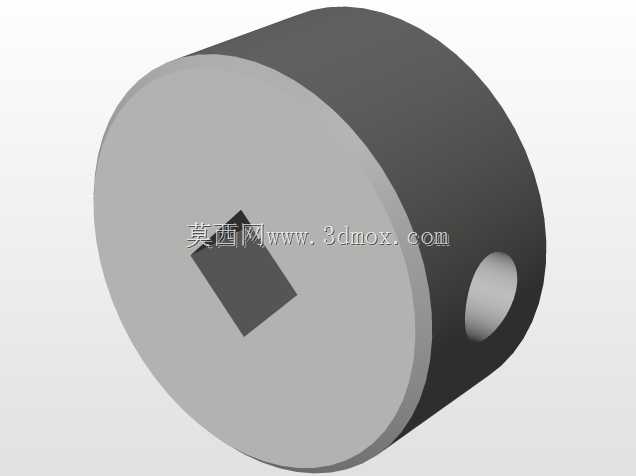
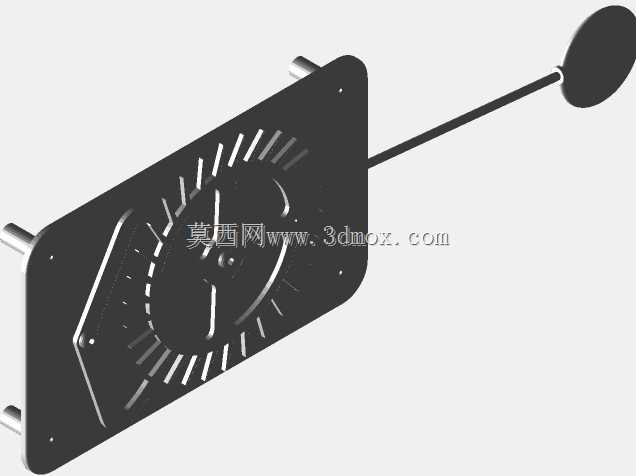

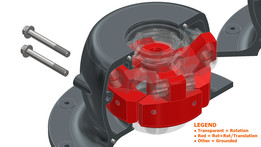
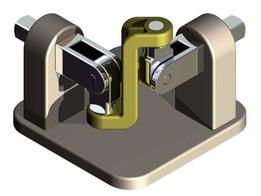
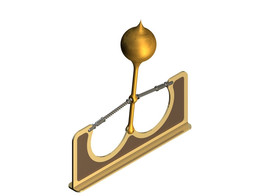
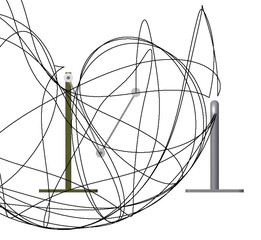
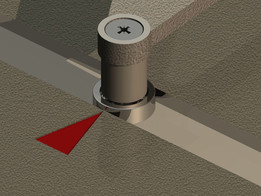
基于马克V.的《钟表擒纵机构》一书。海德里克(版权所有1997年)作为一个良好的来源,我试图提出严格的擒纵设计的本质。这本书是公开的(http://www.nawcc-index.net/Articles/Headrick-EscMechanics.pdf),所以你可以阅读和比较(与书)我在这里提出的一切。我的意图是创建一系列的项目致力于这个主题-正如你将看到的-但只涉及几何方面。实际上,你可以用我的项目作为理解这本书的精确模拟。我建议您下载本书,以便在计算机脱机时使用。所有零件、部件和仿真/动画都是使用Inventor 2014制作的,因此一些特定的参考资料与此软件绑定在一起。从这本书中你可以了解到,有三种经典的擒纵机构:格雷厄姆(死节拍)、反冲和瑞士杠杆。“死节拍”一词在第21页的书中有解释。实际上,由于它们的圆形,调色盘臂沿着轮齿滑动,因此在锁定期间车轮是静止的。更多详情请参见:https://youtu.be/D9UT6YwzmBU. 相比之下,反冲擒纵机构允许车轮向后旋转,因此在锁定期间,拨禾轮实际上是“反冲”的。这种效果可以在我以前的项目“擒纵器”MacDowall(305)中注意到。一个巨大的反冲也可以注意到在我以前的(原始)项目擒纵-防滑爪解决方案。第一步是创建两个部分的几何图形:轮子和调色板,作为机构的主要互联部分。几何学有第一个版本-理想的机制。理想的版本是非常紧密,没有间隙,其目的是建立两个部分的几何结构。在考虑这个版本之后,我们将稍微修改调色板,以使机制正常工作。这就是为什么我提出两个不同的项目:理想的格雷厄姆擒纵机构(这一个)和修改格雷厄姆擒纵机构(下一个)。第一个项目在第11页之前的书中解释:“5:模拟的重要性”。首先,您必须查看显示Inventor草图“Wheel-palete.jpg”的图片。这幅画解释了几何构造是如何形成的。轮齿的小平面为0.5度(不是毫米)。你必须考虑菱形正方形,它有四个驱动尺寸标注(90.00)。它将调色板与控制盘连接起来。第10页的书中解释了这两种尺寸的原因。另一种尺寸是自然正确的,因为它们是半径,并且与同一个圆相切。观看视频时,你会立即看到调色板的移动,这是由于与调色板相连的钟摆。很难看出车轮也被迫顺时针旋转。如果你仔细看一看,你就会明白,当调色板也是顺时针旋转(第二次摆动)时,只有施加在轮子上的运动才能使它旋转。当机械装置从后面呈现时,您会明白,必须将线和砝码缠绕在卷筒上才能产生运动。它们不存在,因为在Inventor的运动仿真中不允许使用螺纹/绳索。取而代之的是,在卷筒上施加一个扭矩(20 N・mm)。无论如何,擒纵机构不能正常工作。事实上,由于没有间隙允许车轮继续移动,所以车轮被调色板挡在两个齿之间。调色板(和钟摆)正在减慢它们的运动,最后,它们将完全停止。这个问题将在我的下一个项目中解决(见经典的擒纵机构-格雷厄姆(修改))。其中包括文件“Output Grapher(5s).jpg”,您可以看到两个移动部件的缓慢移动。进入环境/动态模拟并运行一次模拟,然后单击“输出图示器”工具亲自查看。查看下一个项目(经典擒纵机构-Graham(已修改))以查看零件的正确移动。注意您将注意到小偏心孔(?2毫米)。将其放置在那里是为了引起动态模拟模块的注意,以便自动为车轮创建旋转接头。如果没有此孔,Inventor中关节的自动创建将排除车轮,因为自动移动不会获得此零件。我不想在运动仿真的设置中更改关节的自动创建,也不想更改零件、进入/离开运动仿真并查看更改。另一种方法是手动插入关节,进入/离开运动仿真似乎更复杂。享受吧

- 全部评论(0)

- 模型大小 :7.06 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :Autodesk Inventor,STEP / IGES,Autodesk Inventor,STL,Rendering,Autodesk Inventor