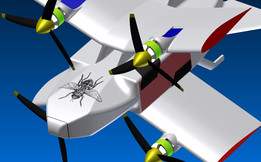
独立滑翔机牵引-继续(无约束幻想:)

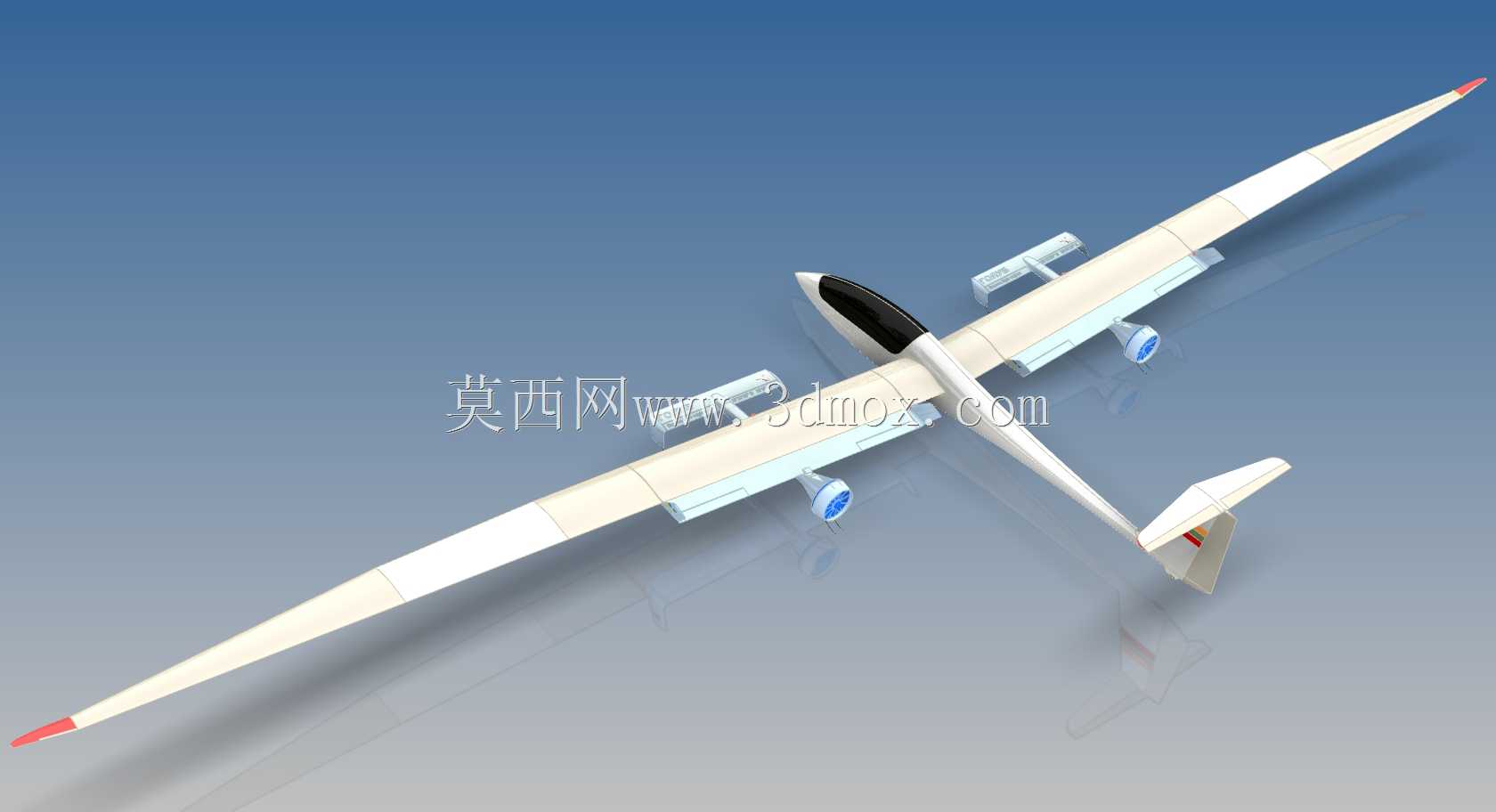


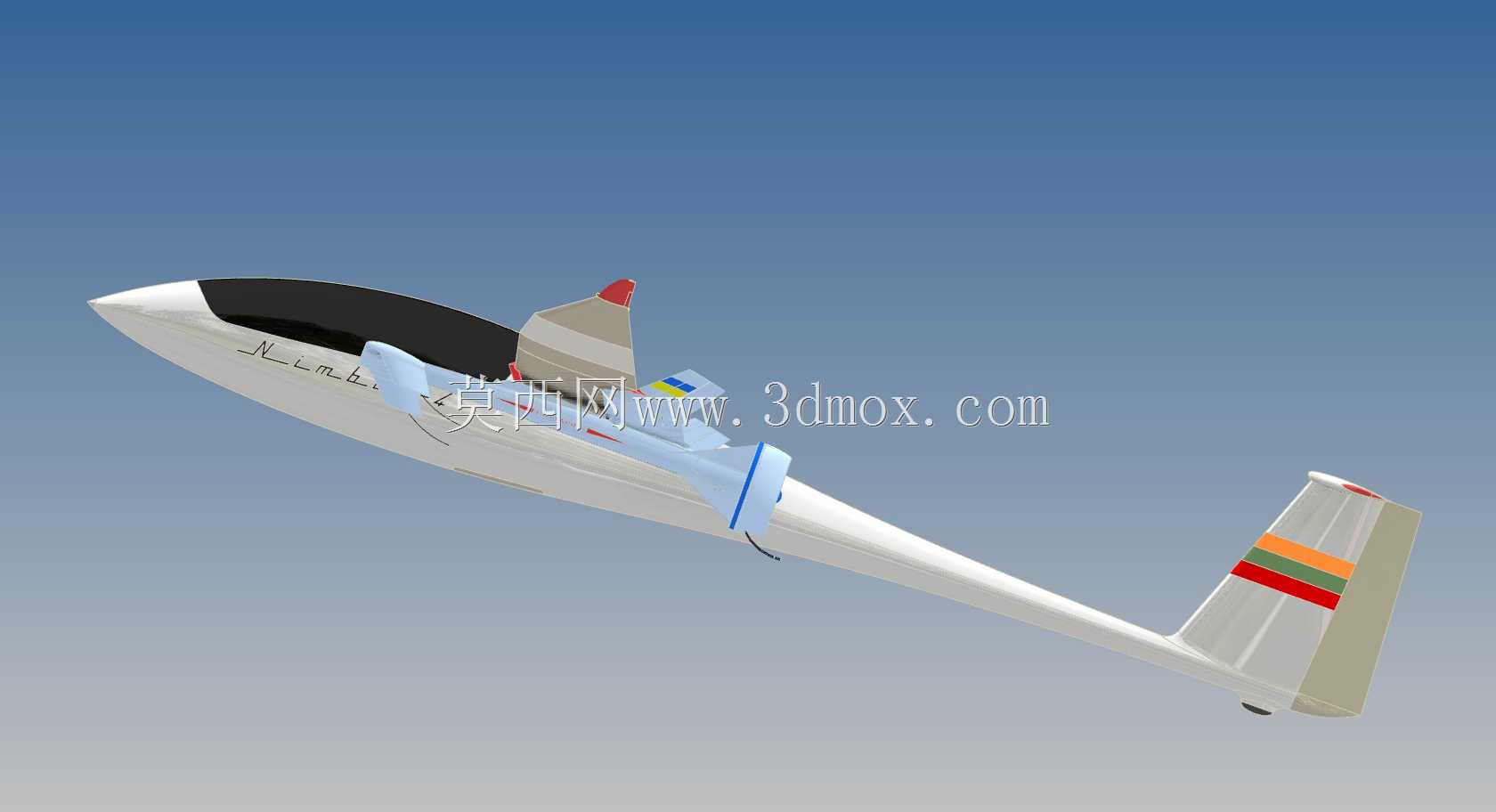



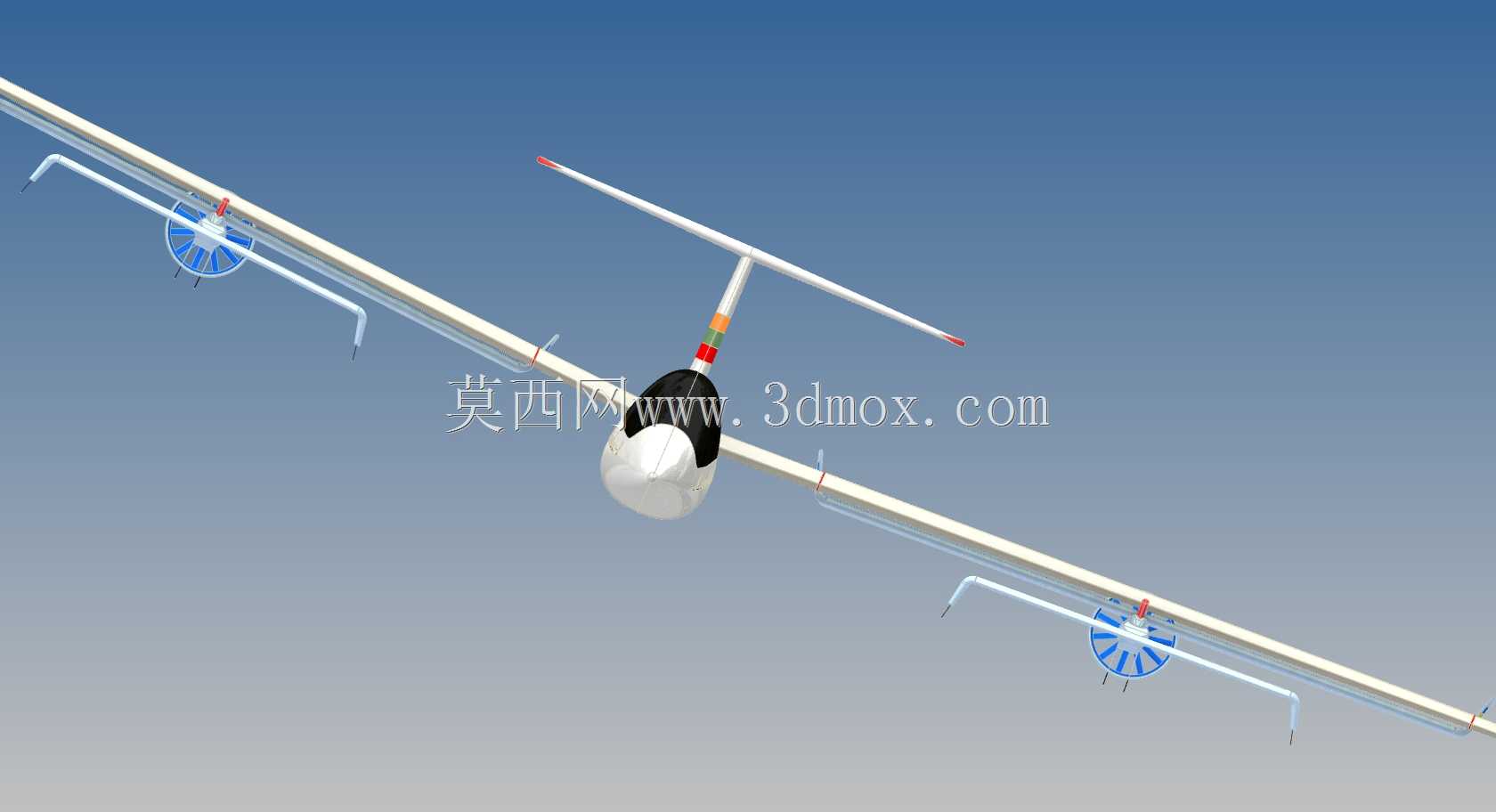
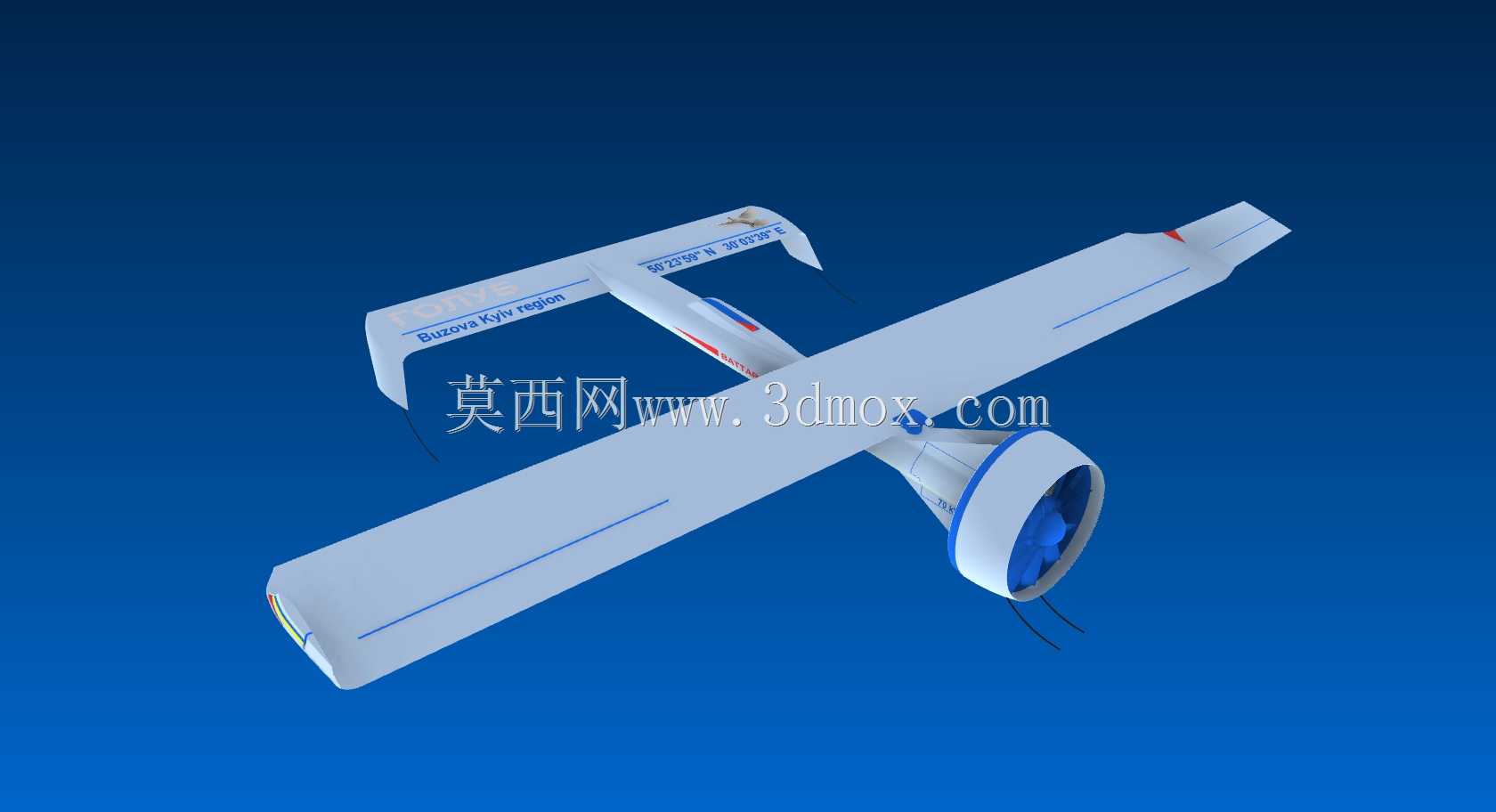
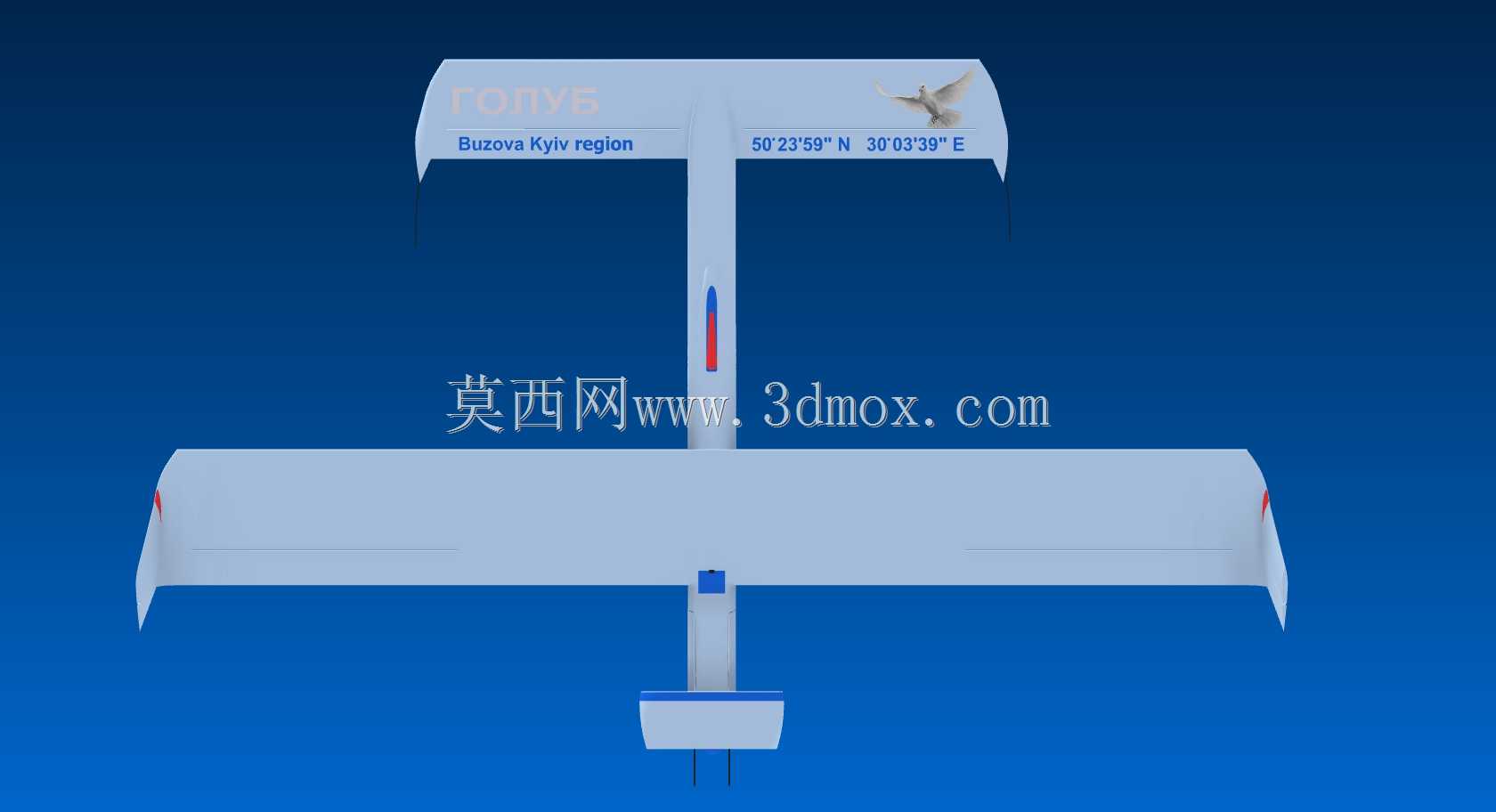
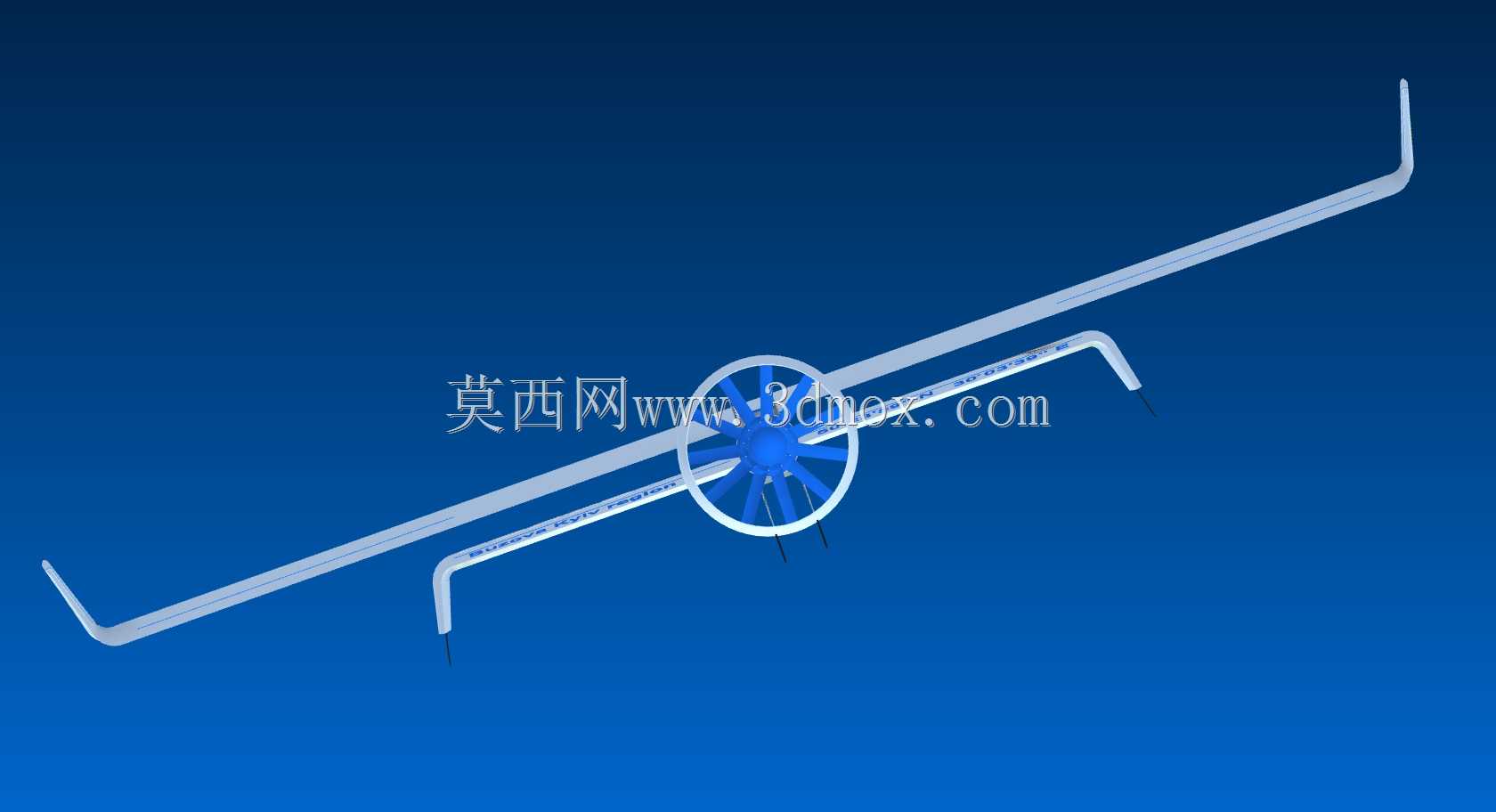


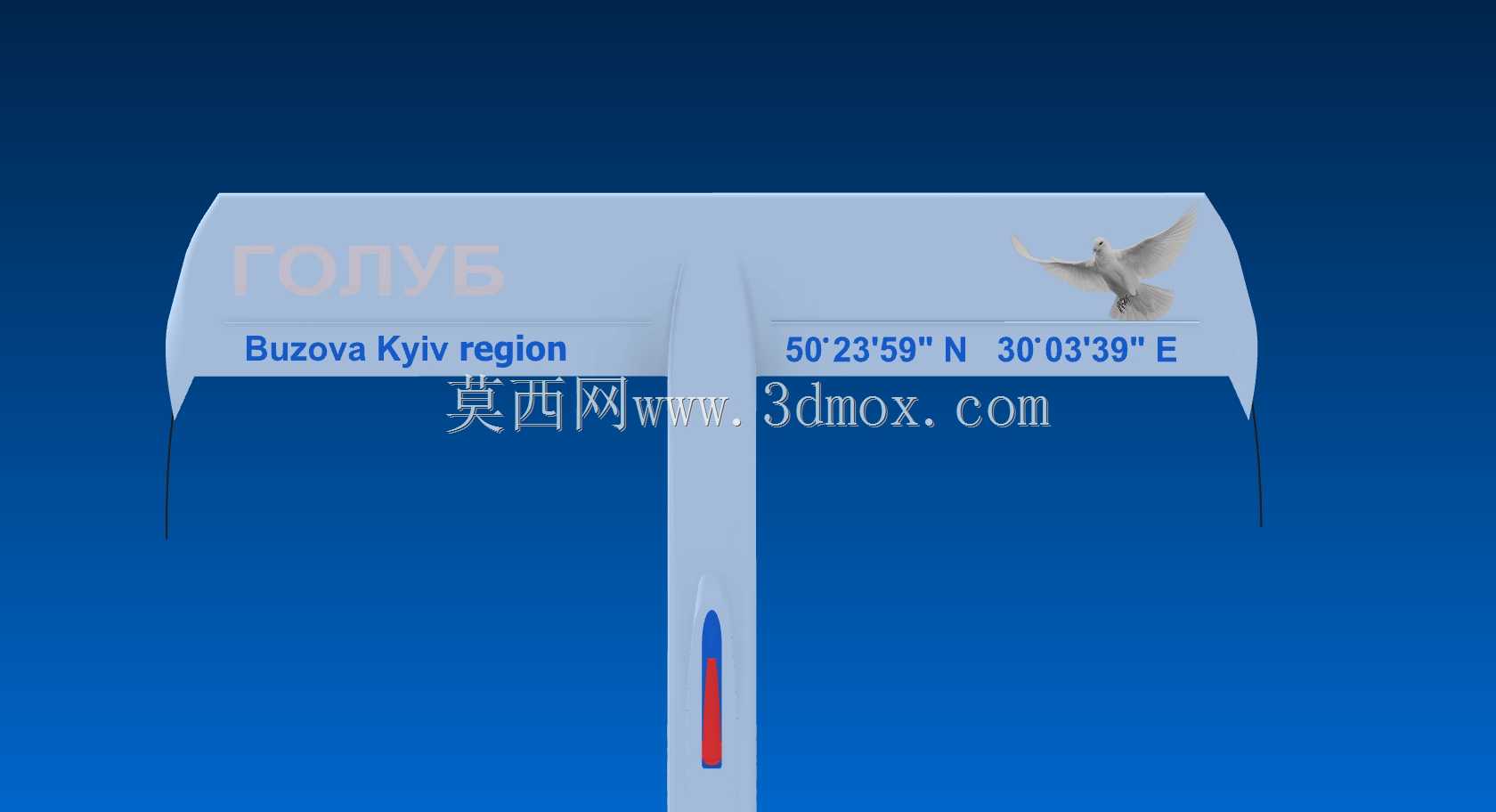


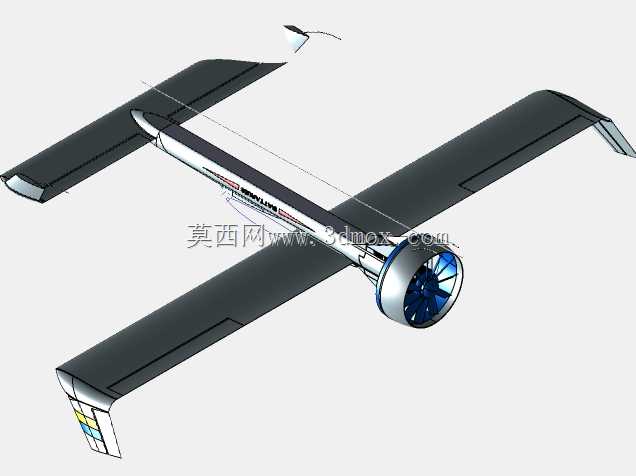
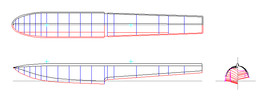
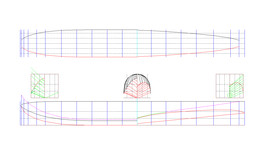
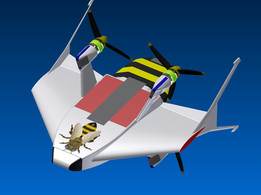
我拿着Nimbus-4滑翔机在Antanas Sulskis的上演示了我的系统-非常感谢。。。在这样的设计中,使用Nimbus-4机身看起来更令人印象深刻。。。?ГОЛУБ? (与前一个版本的根本区别是使用了硬翼来让模块飞到发射场。牵引车的刚性翼在挂接配置中起到了滑翔翼的作用;因此,滑翔机本身的襟翼在起飞过程中不使用。将牵引物与滑翔机对接时不需要任何额外的独立元件。牵引设计是多功能的,只需适应类似类型的不同滑翔机(如Nida或Nimbus)。通过转动与滑翔机机翼后缘平行的机翼来实现自适应。断开牵引车后,它的机翼是自动设置严格垂直于飞行。牵引车有一个“鸭”的空气动力学设计,没有失去平衡(升力是由机翼和水平尾翼创造的)。根本上:升力中心和重心的滑翔机加牵引系统,确保稳定和可控性只靠滑翔机的舵。系统提升力的增加允许牵引质量增加至50 kg,这些是额外的电池-能源消耗-电机飞行时间。EMRAX 188电机,重量6.8 kg峰值功率70 kW连续功率28 kW 7000 RPME-BAMO-D3控制器,重量6.5 kg电池元件3.6 V 1500 mAh 8C(12 A)尺寸76x40x6.5 mm重量35 g600元件-3.2 kWh-21 kg 10-12 min工作原理-见*.doc文件
标签:


- 模型大小 :116.18 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :AutoCAD,STEP / IGES,AutoCAD,STEP / IGES,Other,Rendering