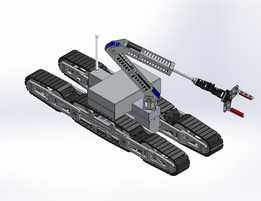
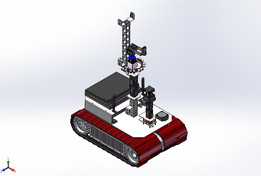
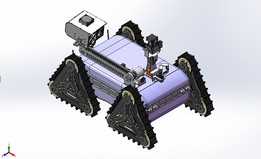
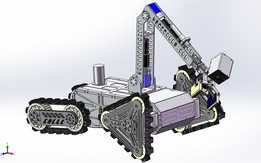
先进机动小型无人地面车辆(COF)
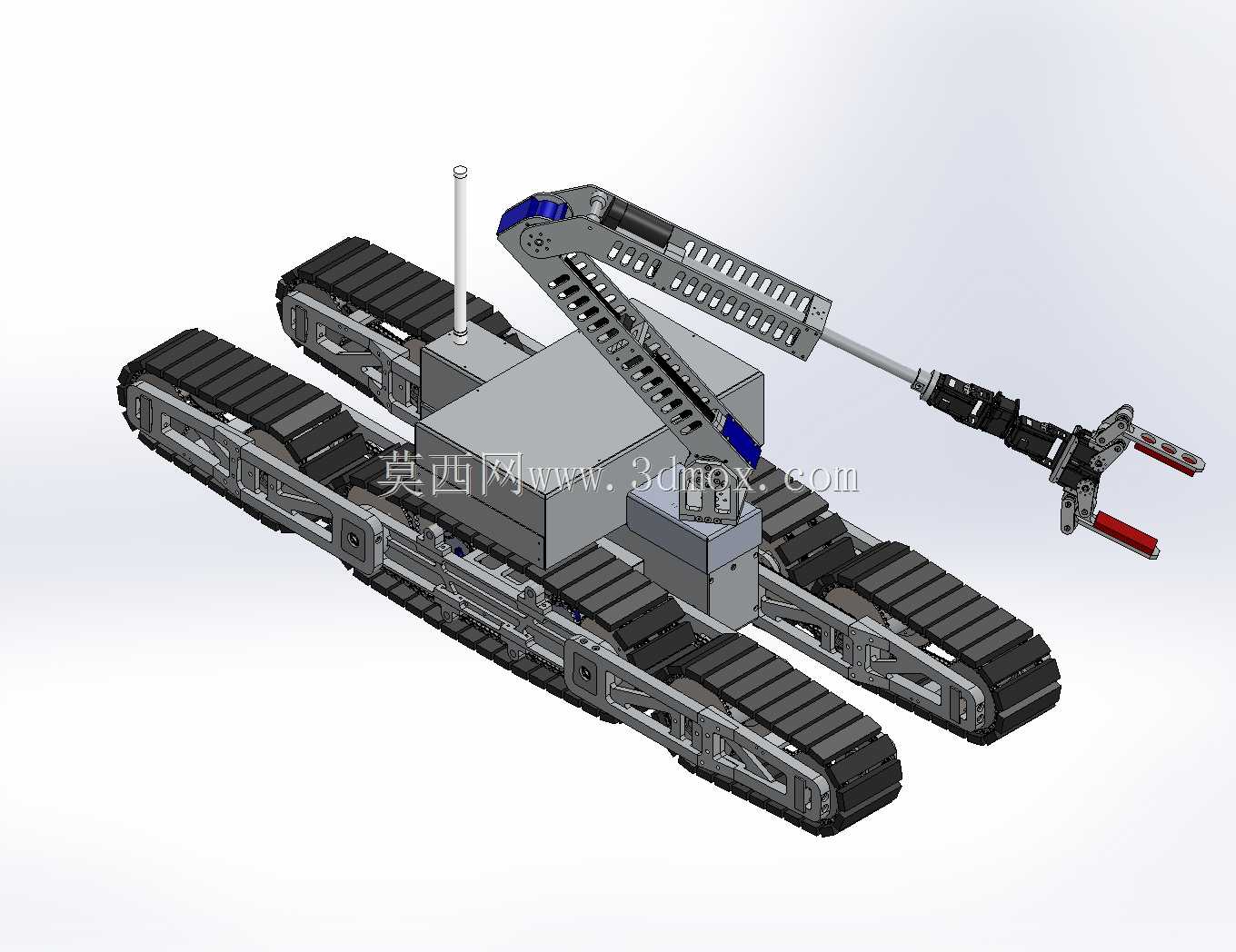




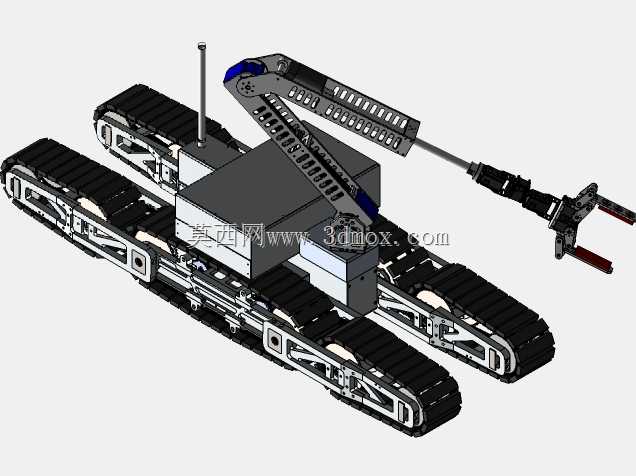
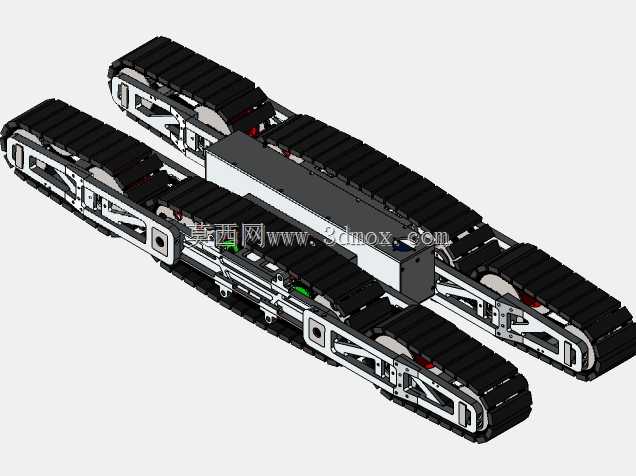
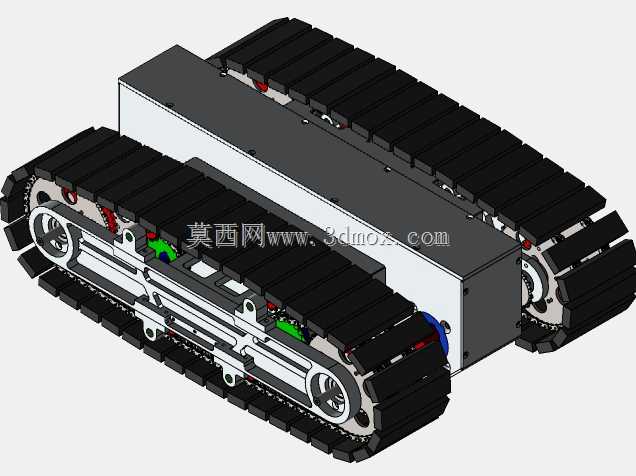

这个相当巨大的救援机器人的移动平台是专门为在矿井内工作而设计的。其可重构的履带式布局便于在受限空间中机动和通过大型障碍物。铁轨本身由涂有耐磨橡胶的金属链制成。因此,该机器人可以方便地穿越矿山中较为常见的砂石。机器人的动力地形由6个相同的有刷直流电机组成,这些电机提供足够的动力,可以在平坦的地面上爬升到60度的斜坡,并达到1.6米/秒的最大速度。这个机器人最初是由另一个团队设计和制造的,我被要求重新设计它,因为第一个原型有重大的技术问题。制造完成后,现有版本成功通过测试,并于2014年通过所有设计标准
------分隔线----------------------------

说点什么吧
- 全部评论(0)

还没有评论,快来抢沙发吧!
- 模型大小 :77.45 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,Rendering,SOLIDWORKS,Rendering,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,Rendering,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SO