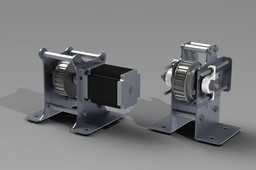
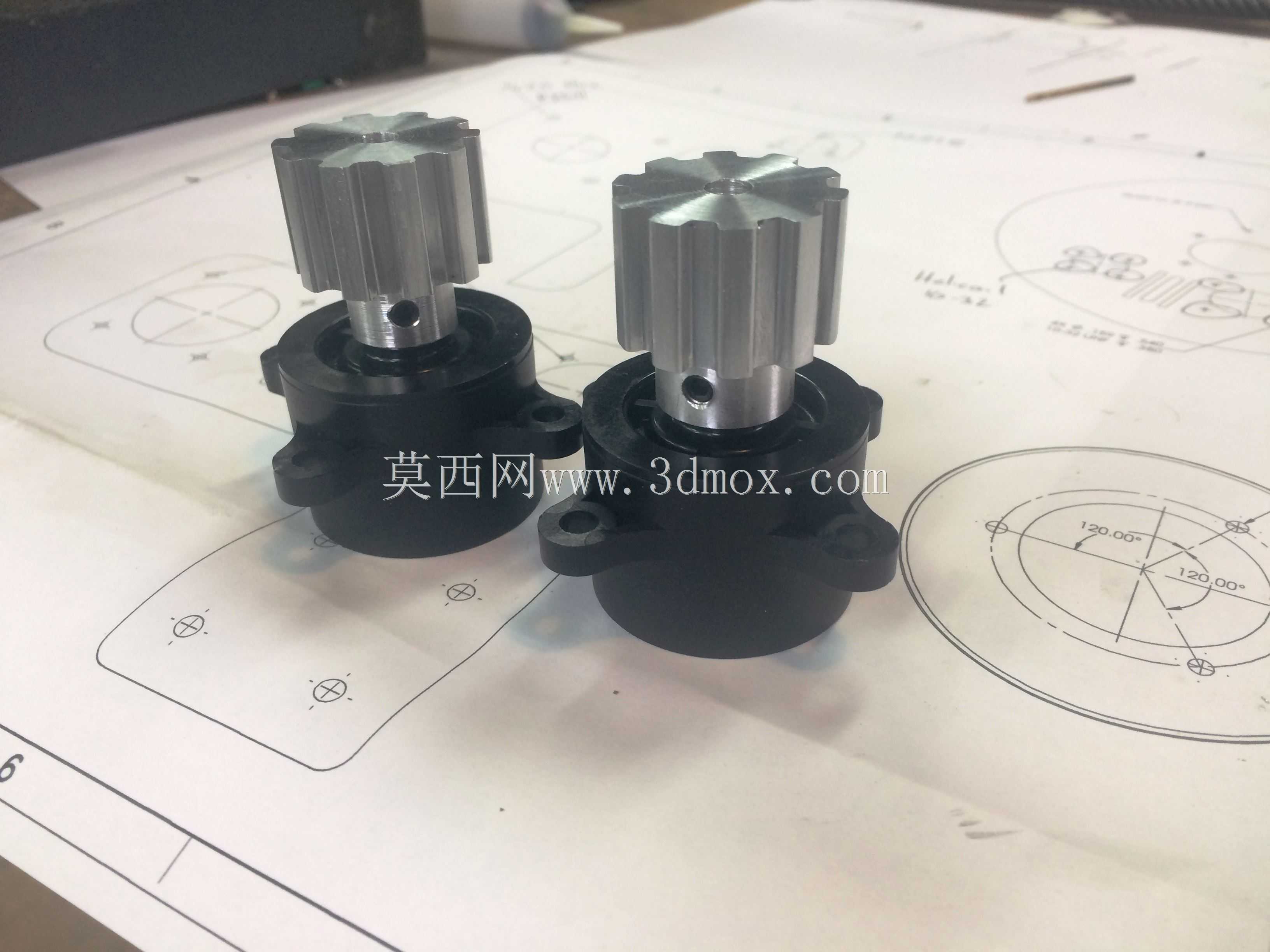
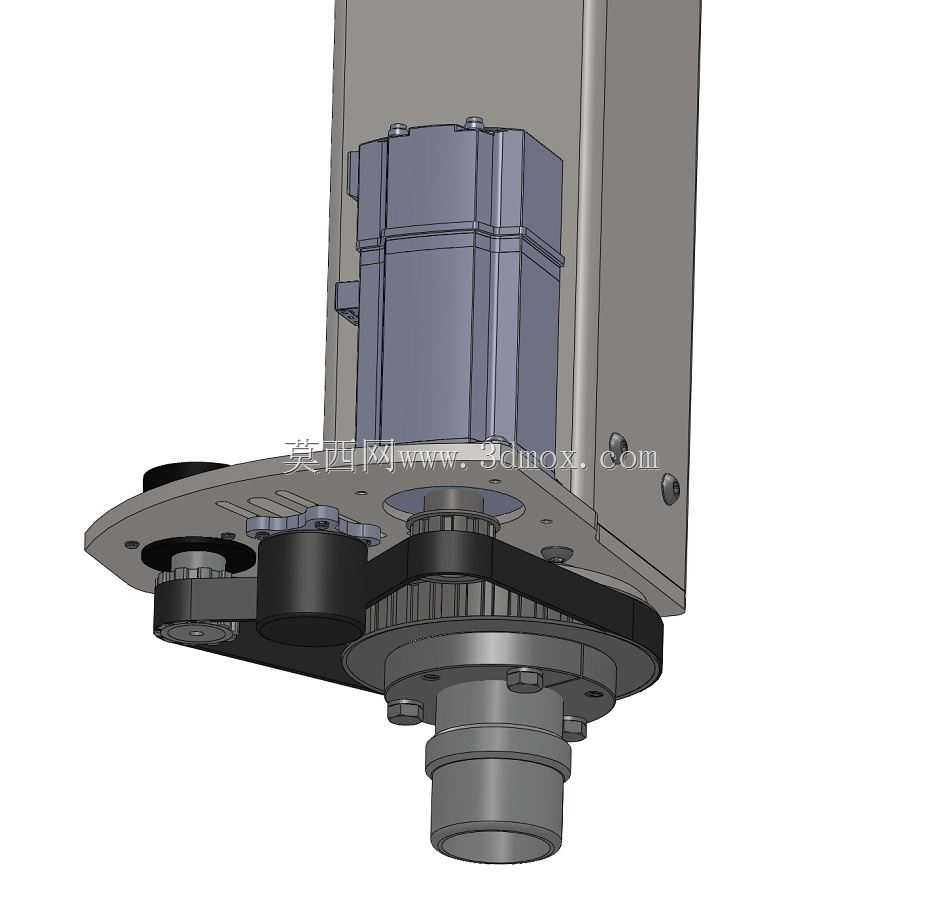
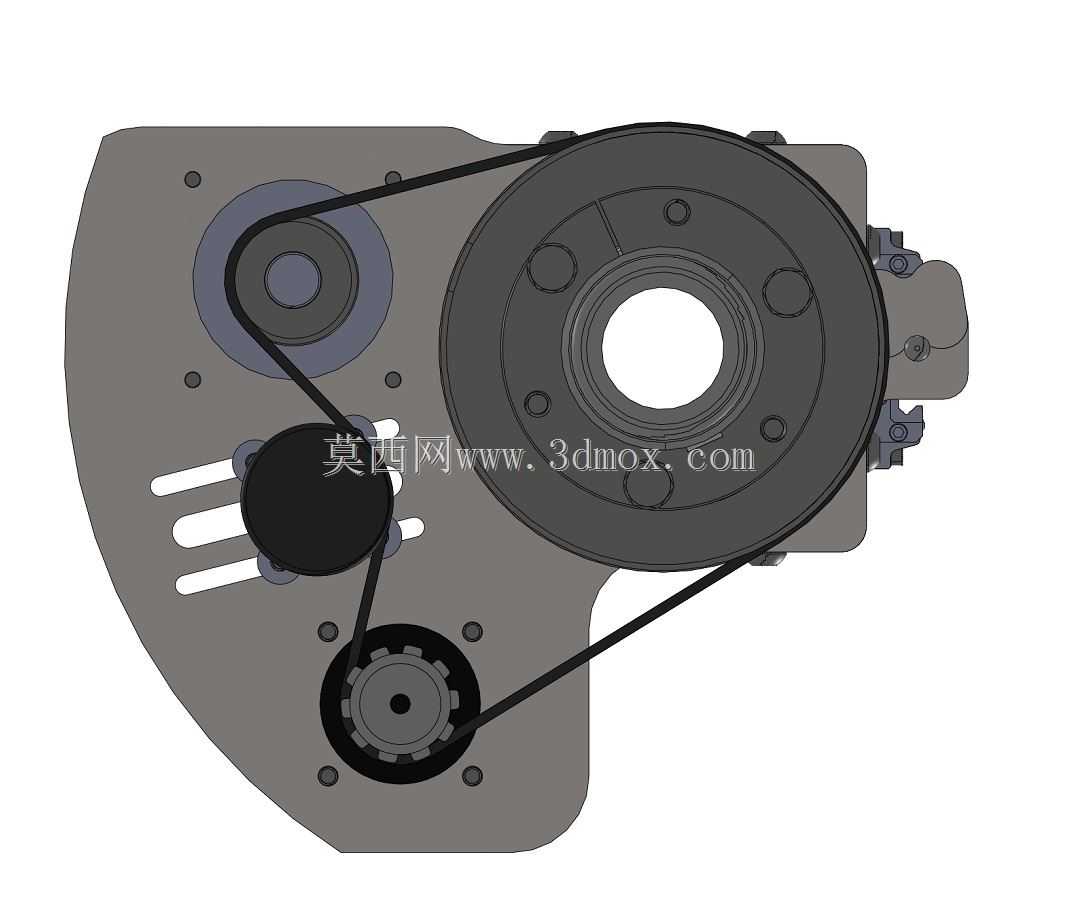
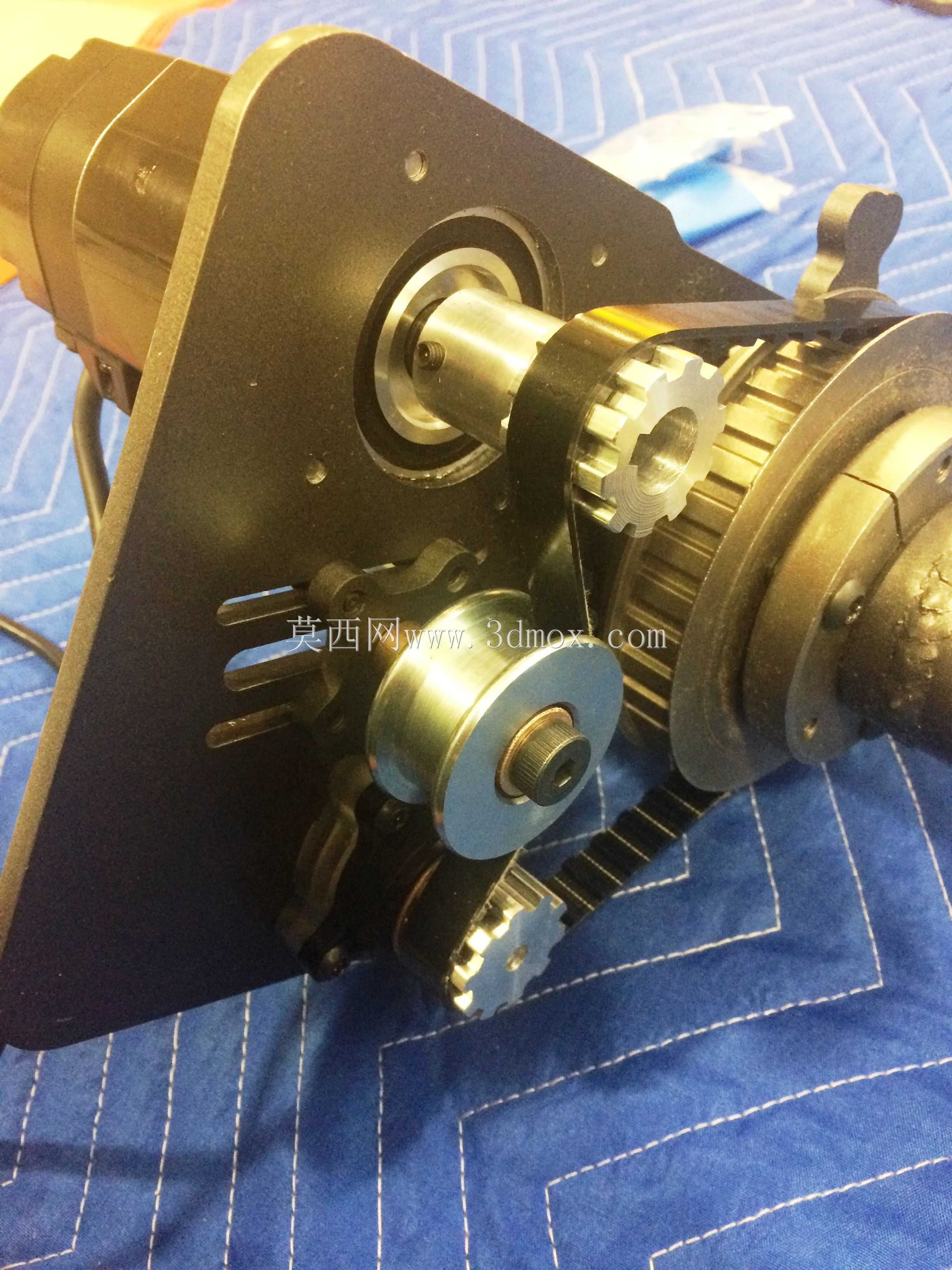
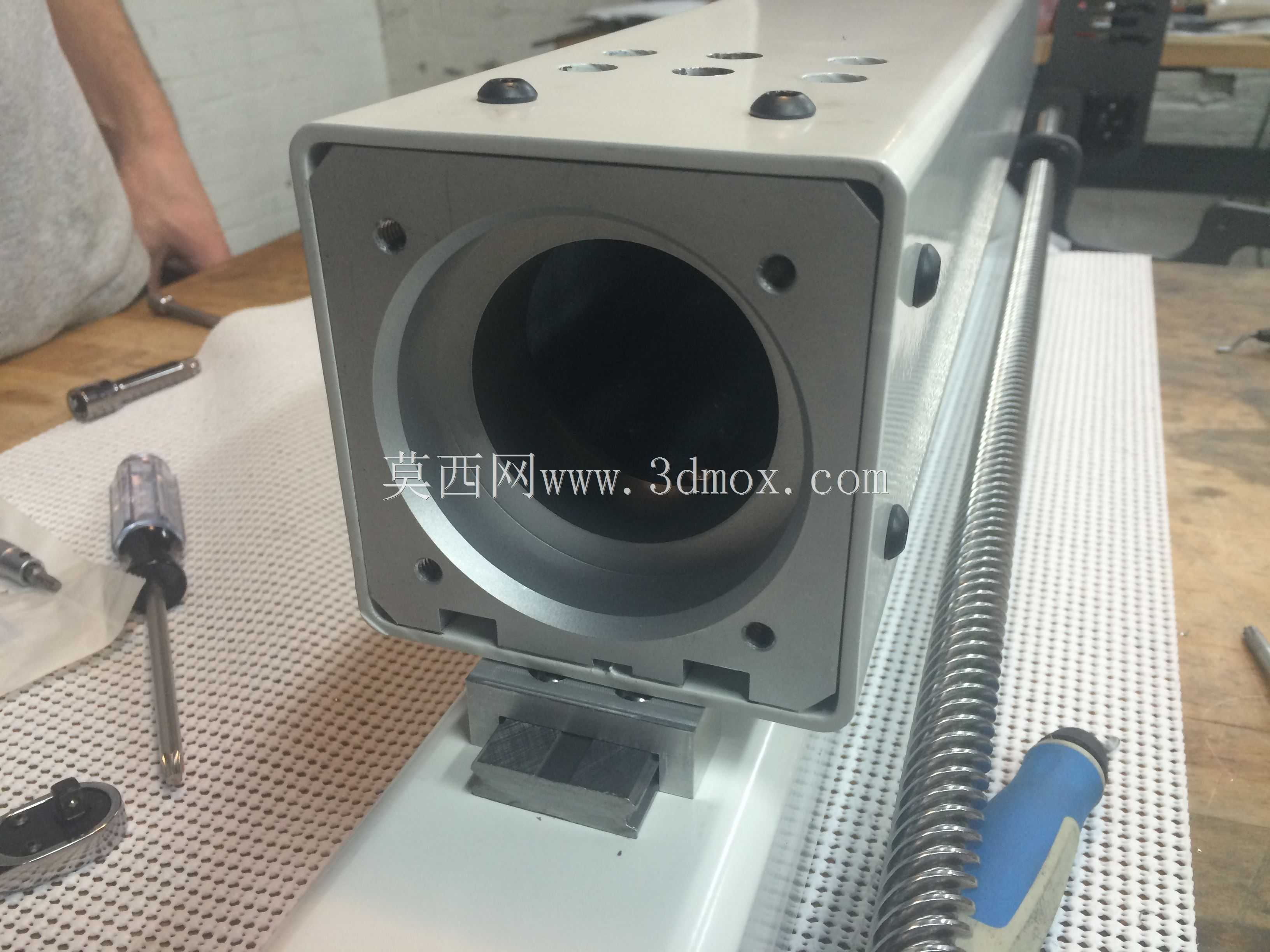
旋转末端执行器
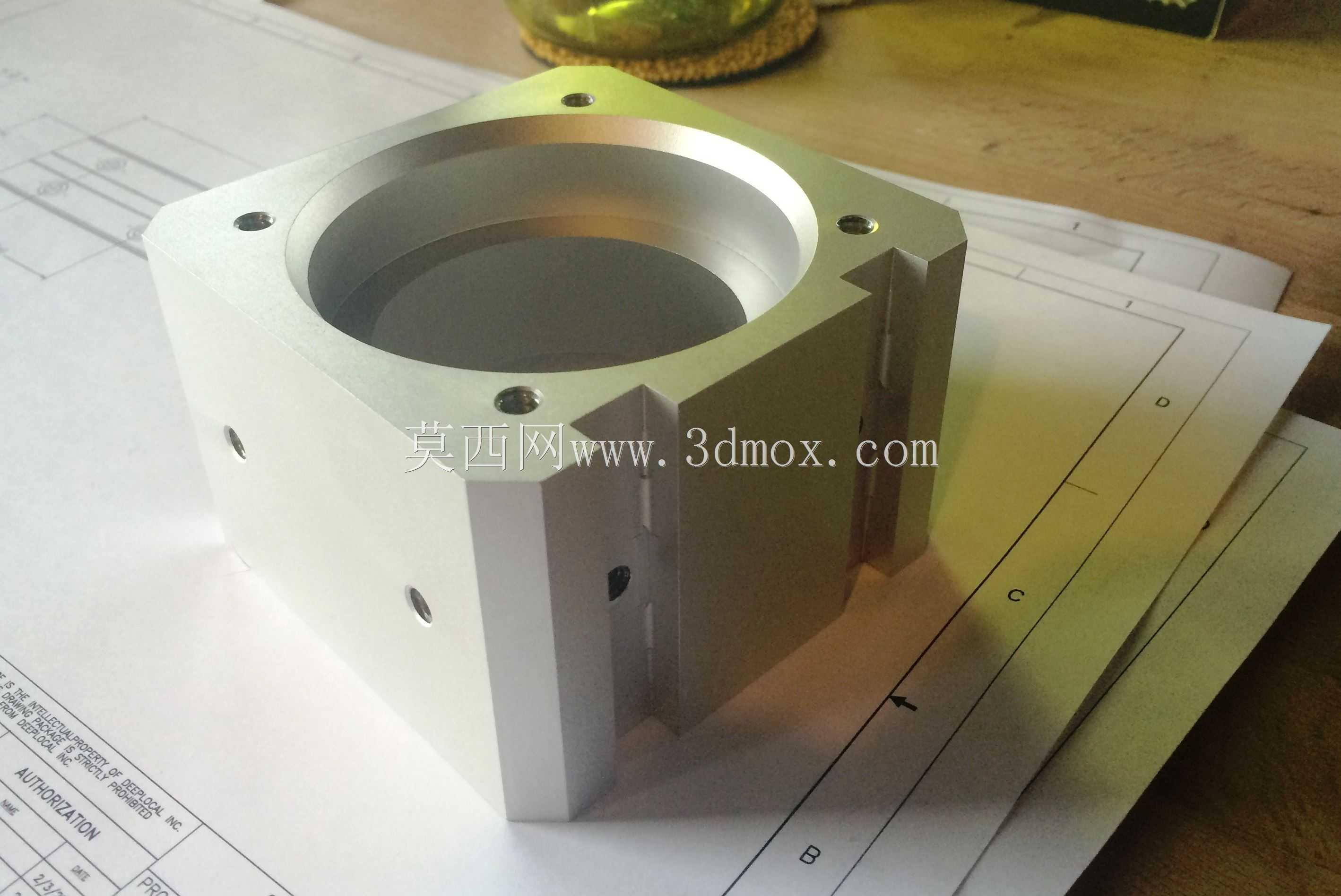
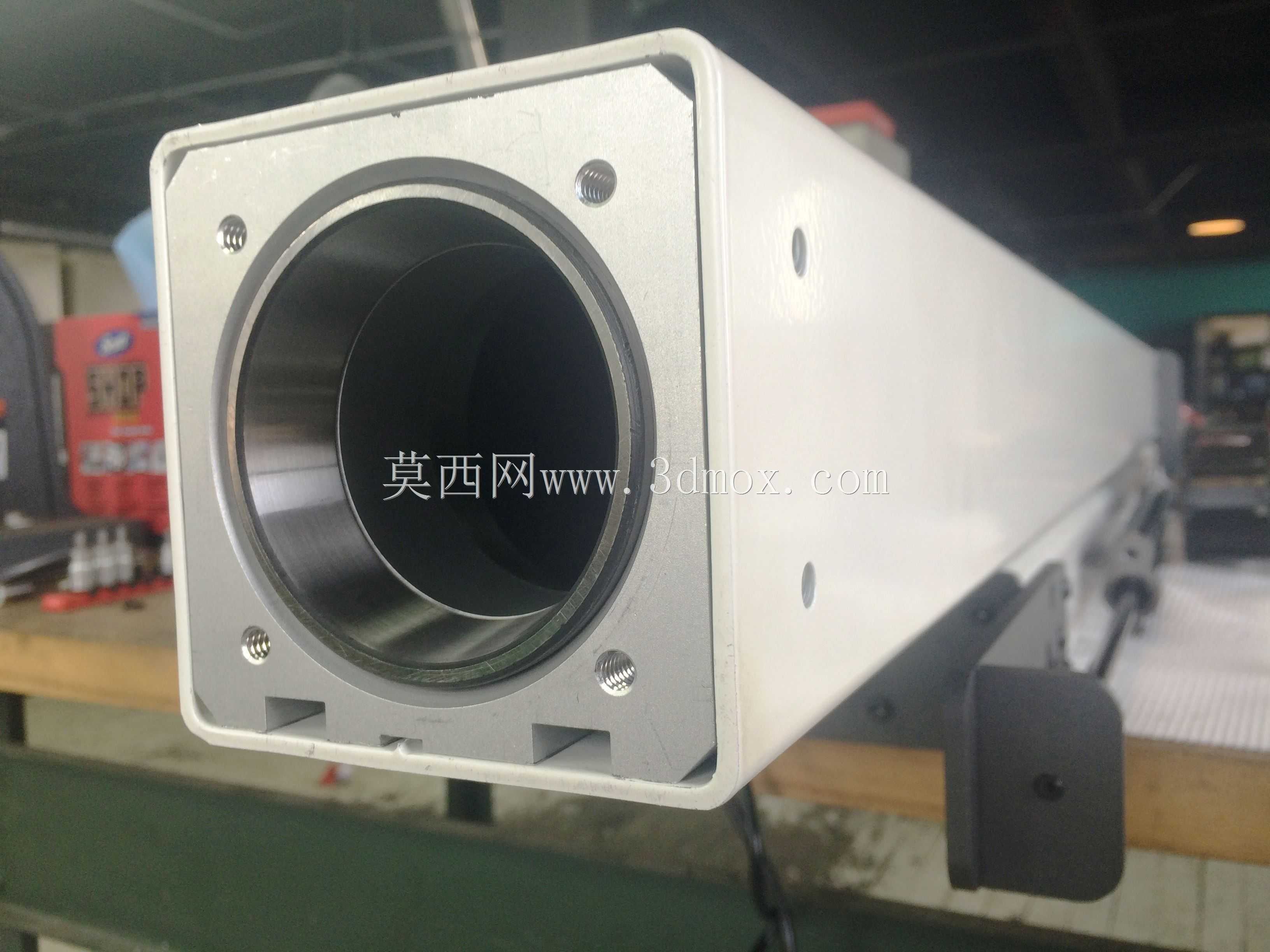
通过产生一个螺栓式伺服驱动的皮带驱动装置,为机器人元件的末端增加了一个自由度。该装置用于监测和定位长臂上的末端执行器。伺服电机与张紧器、旋转阻尼器和夹持式快速断开皮带轮连接,以旋转主轴总成。主轴通过转动轴环和轴承螺母安装在铣削轴承座中的两个锥形轴承上。主轴是中空的,以便电线、管子等通过


- 模型大小 :33.6 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :Rendering,STEP / IGES,Rendering


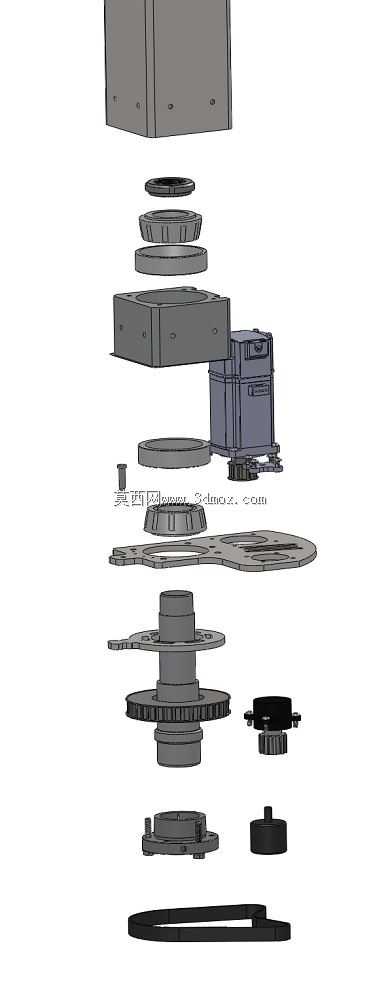




通过产生一个螺栓式伺服驱动的皮带驱动装置,为机器人元件的末端增加了一个自由度。该装置用于监测和定位长臂上的末端执行器。伺服电机与张紧器、旋转阻尼器和夹持式快速断开皮带轮连接,以旋转主轴总成。主轴通过转动轴环和轴承螺母安装在铣削轴承座中的两个锥形轴承上。主轴是中空的,以便电线、管子等通过