小型取样刮刀





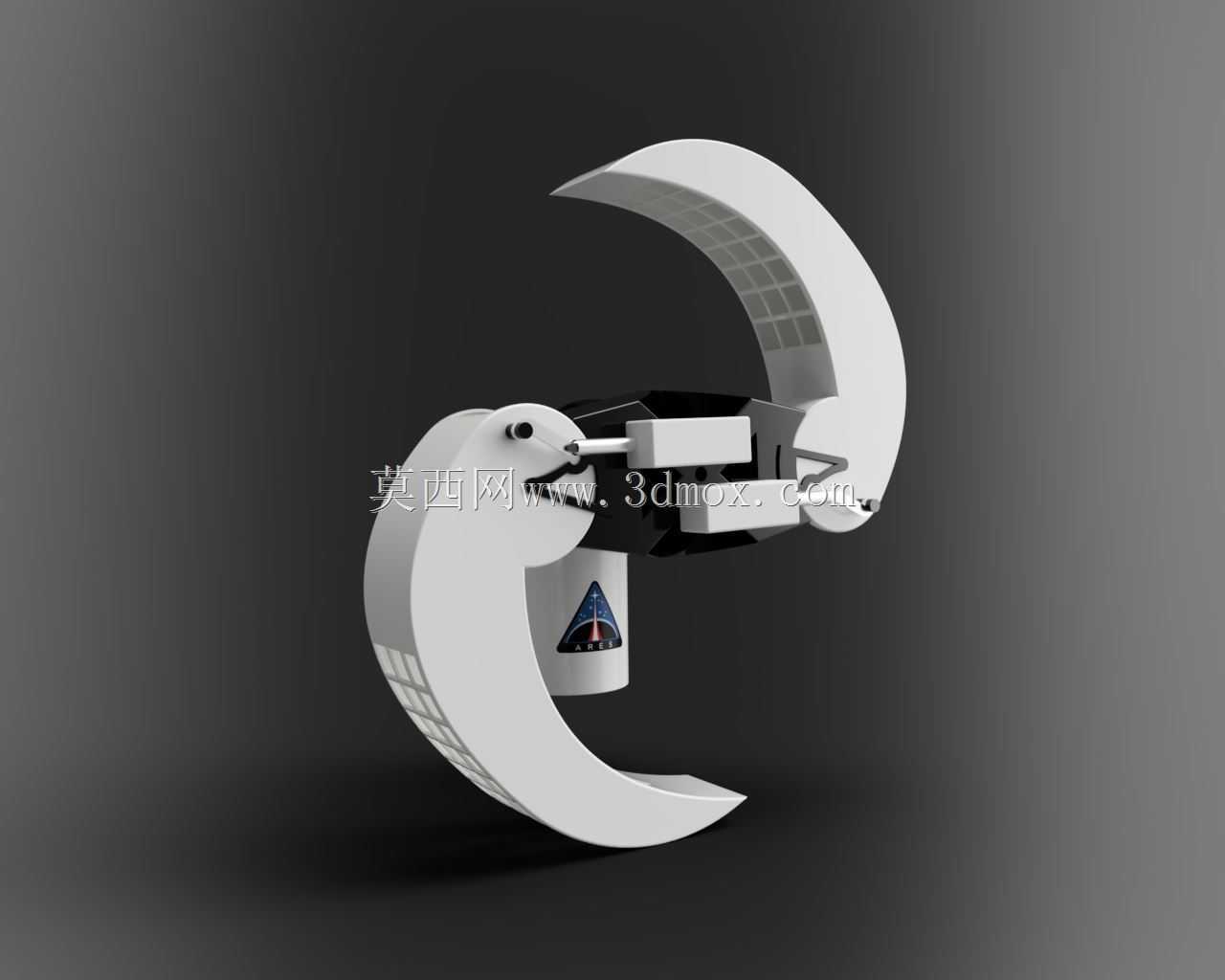
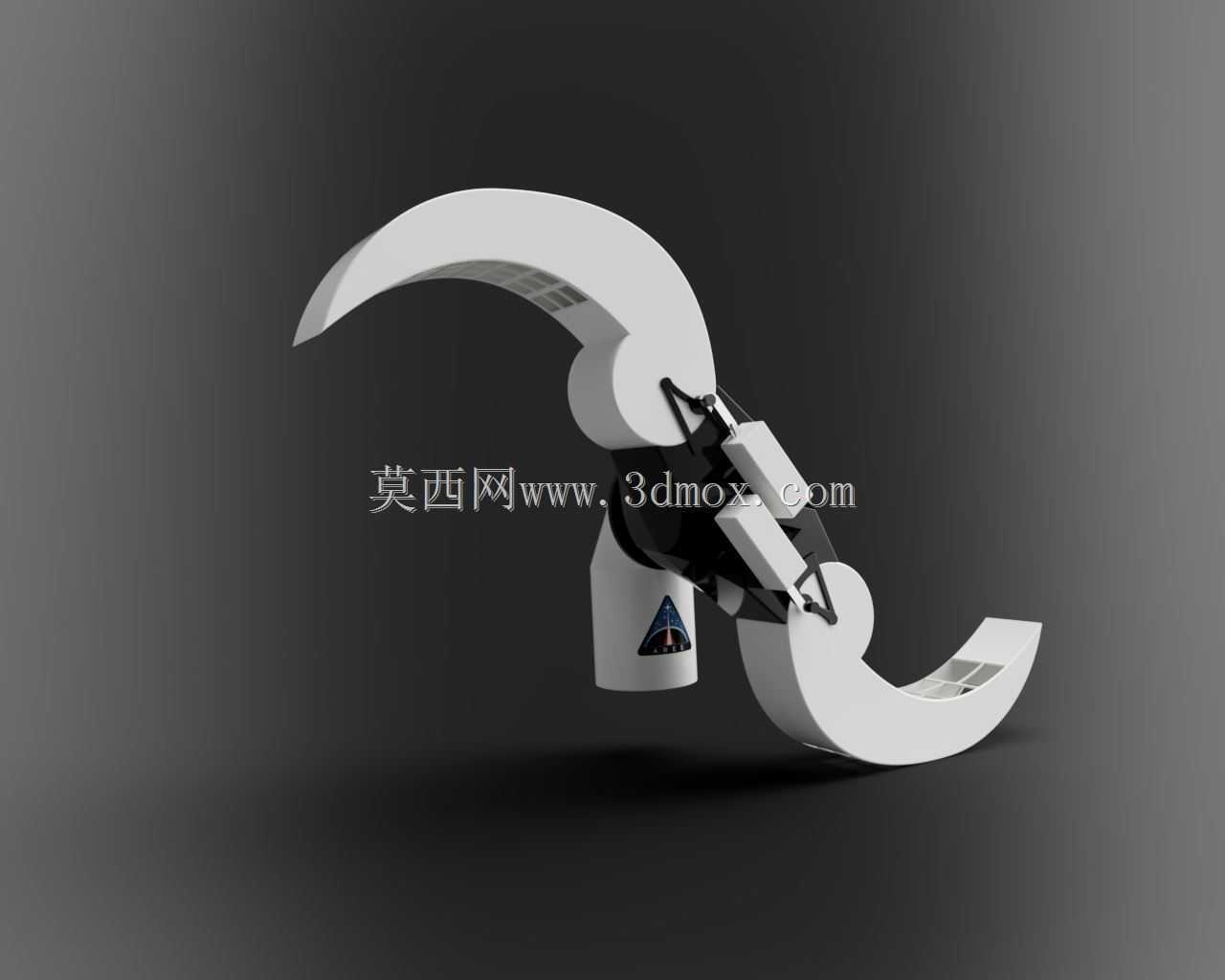
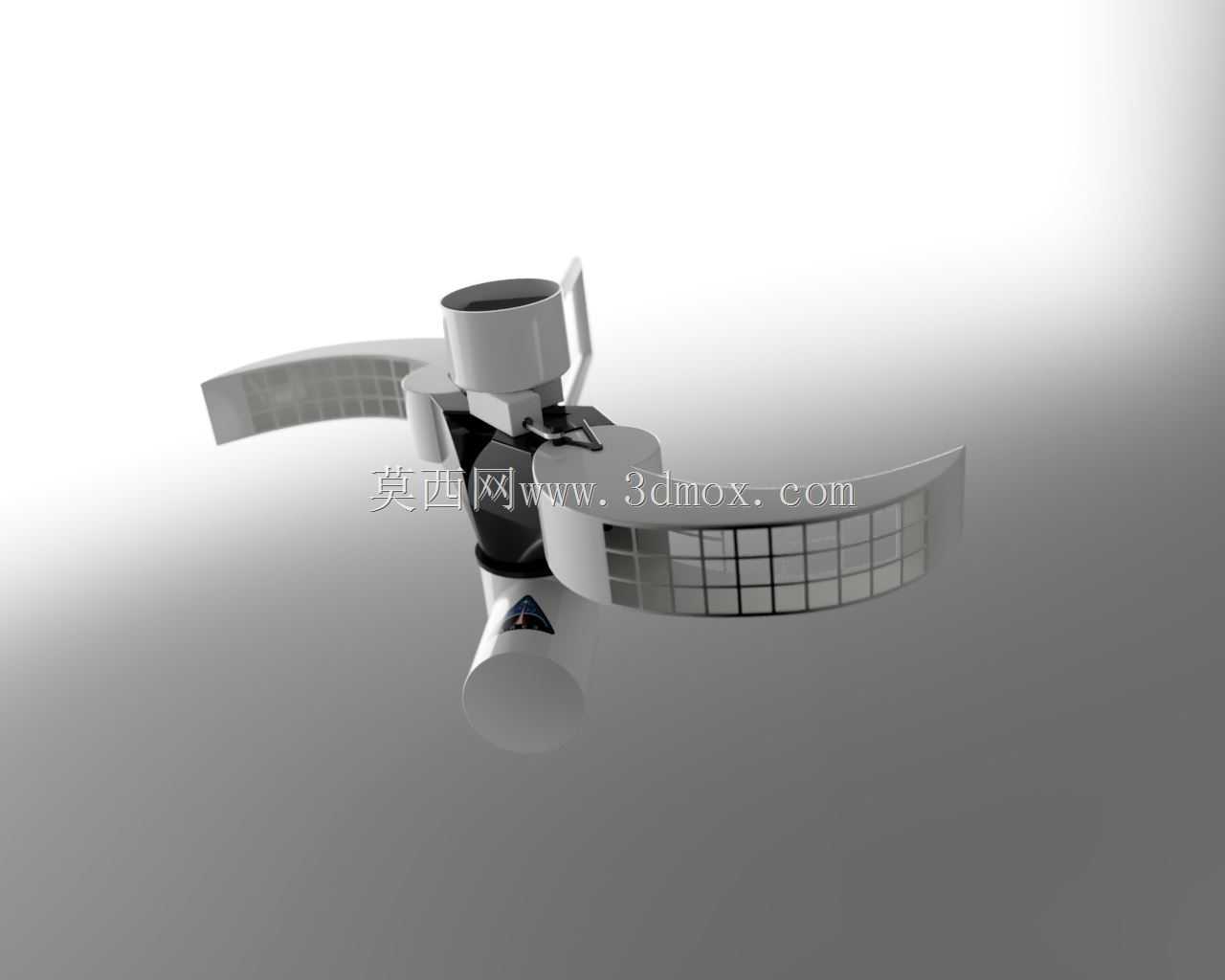




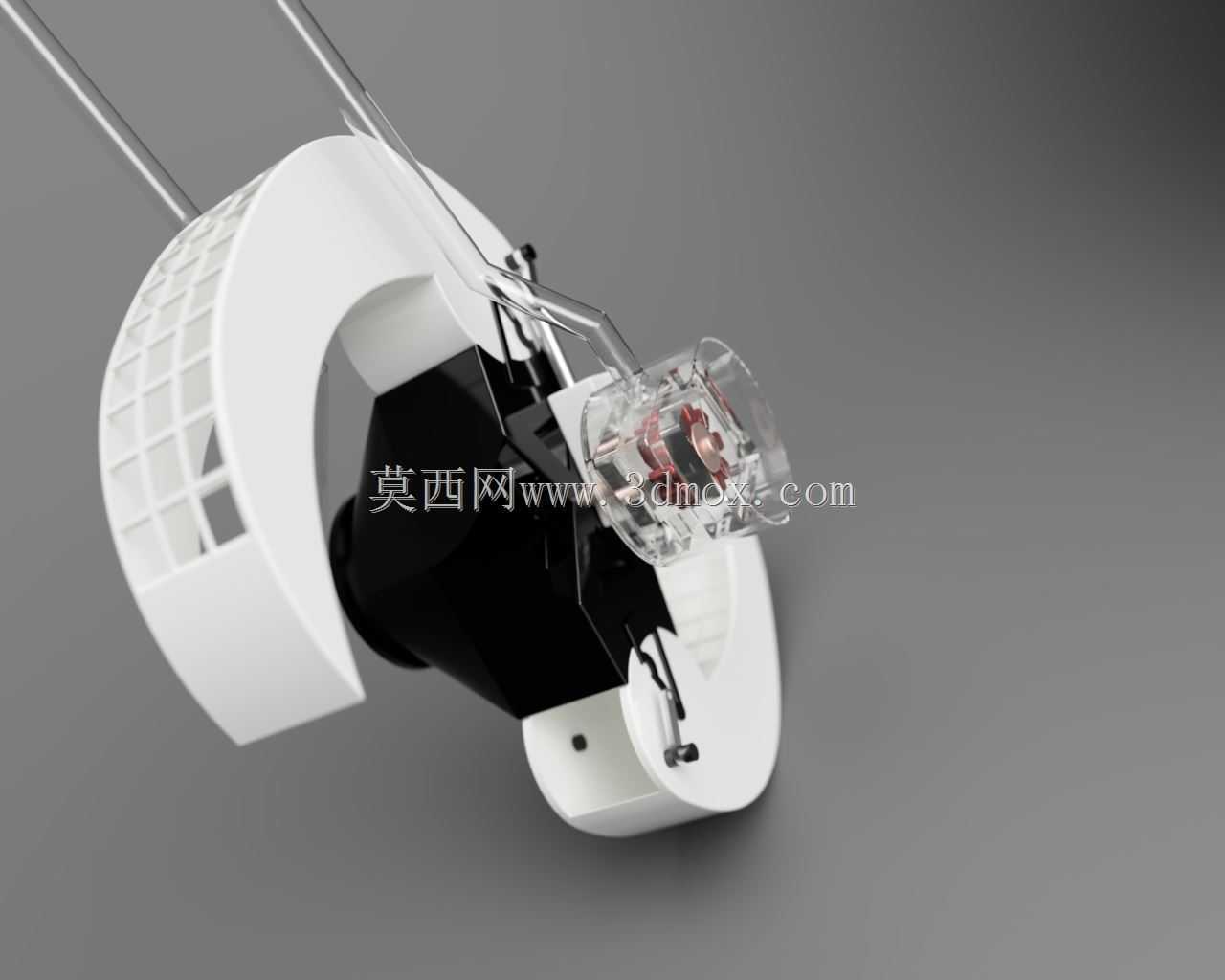
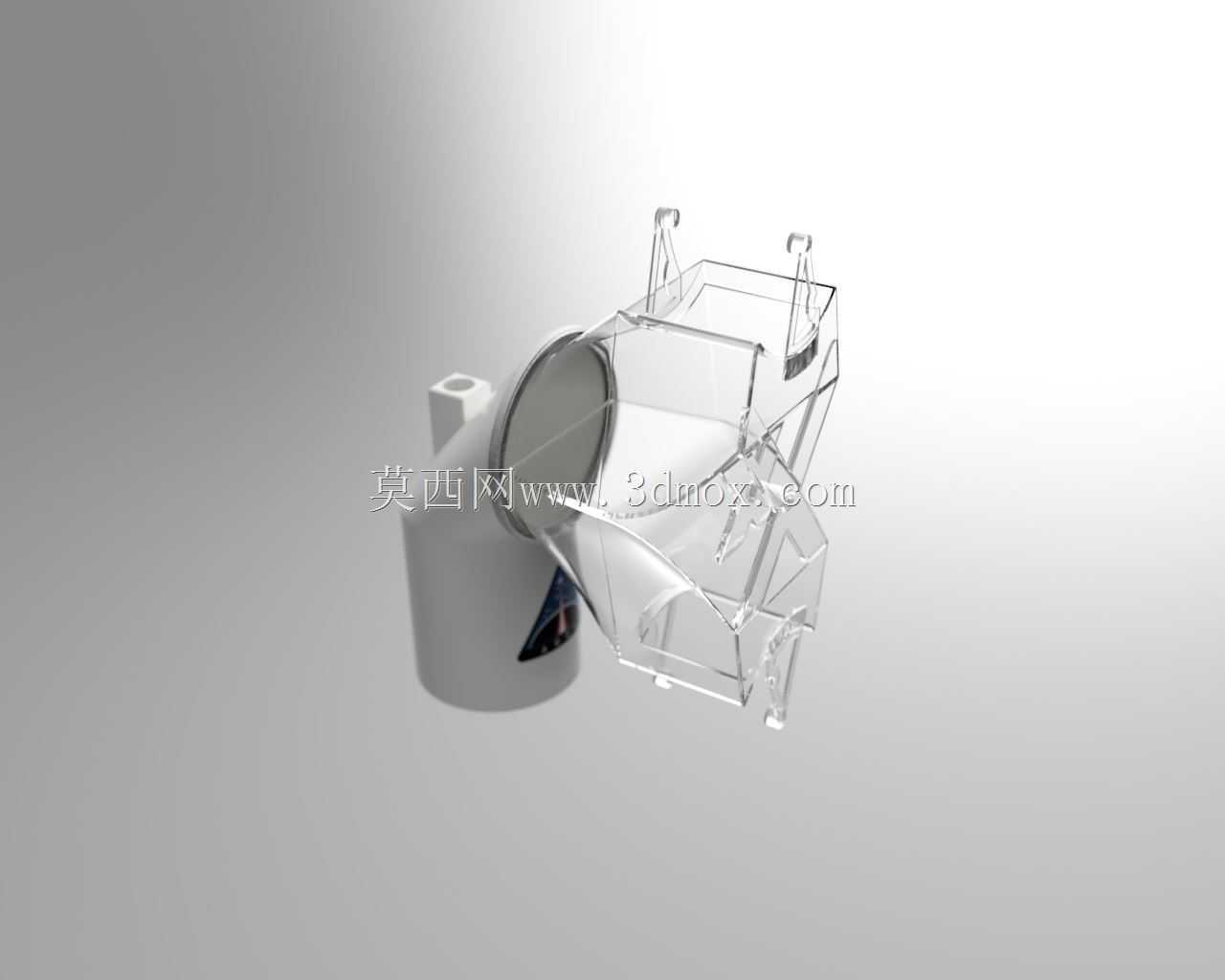









工作原理:1.刮板1和2最初关闭以占用较少空间,在线性执行器的帮助下按顺序展开。首先部署的是1号刮板,只能采集较大的表土(1~2cm)。然后,在步进电机的帮助下,系统(中间收集器、刮板1和刮板2)缓慢旋转(~5rpm)。4.采集的样本被转移到装有数字耳镜式摄像机(用于视觉确认)的容器中。然后,刮板1缩回,刮板2能够获得更细的表土(~<;1) 已部署。该过程将继续进行,直到收集到足够数量的表土(并目视确认)关键设计特征:1.由于其伸缩臂,整个系统非常紧凑。简单准确的选择性取样设计。可安装在车辆外围设备以及机械臂上。4。来自数字耳镜(如照相机)的图像可以用合适的算法进行处理,并且可以采取进一步的行动,以便自动或由地球上的任务控制人员进行精确采样。刮刀的设计使它只允许特定大小的表土,不会被卡住。整个车身由轻质铝合金(Al-6065)7制成,重量约为286g,不包括电子部件。8.所有接线均固定在空心支架内。满足所有必要的要求和条件。我个人喜欢并学到了很多关于设计和渲染的知识。感谢和NASA-ARES组织了如此创新的挑战!祝剩下的参赛者一切顺利。干杯
标签:


- 模型大小 :17.22 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,Rendering,STL,STL,STL,STL,STL,STL,STL,STL,STL,STL,STL,STL,Rendering