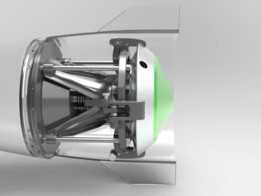
拉索鼓
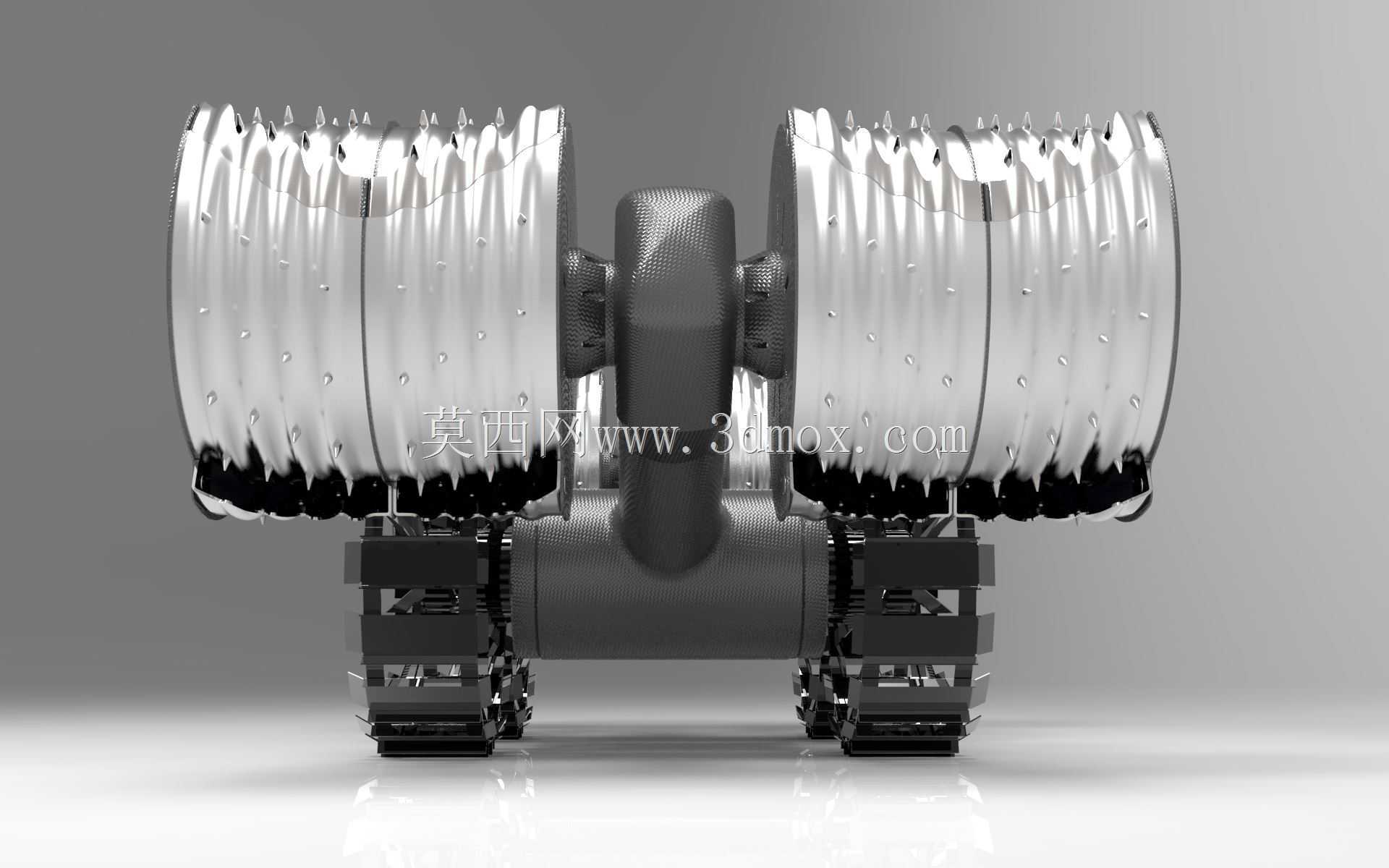
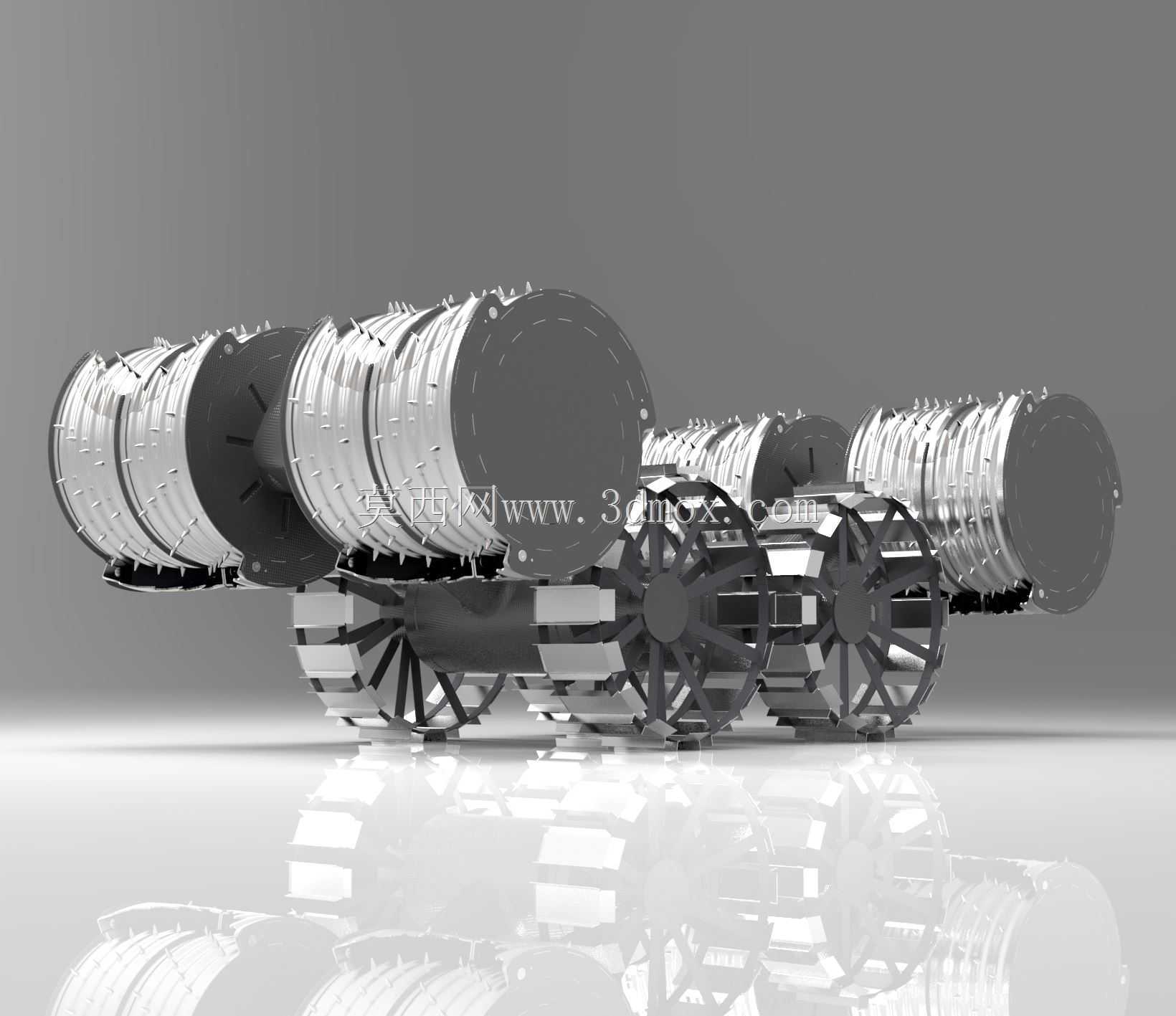

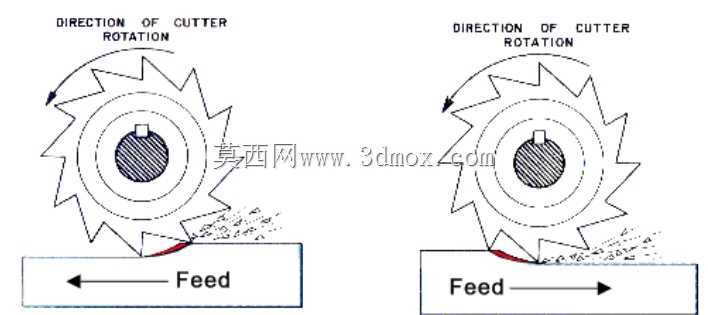
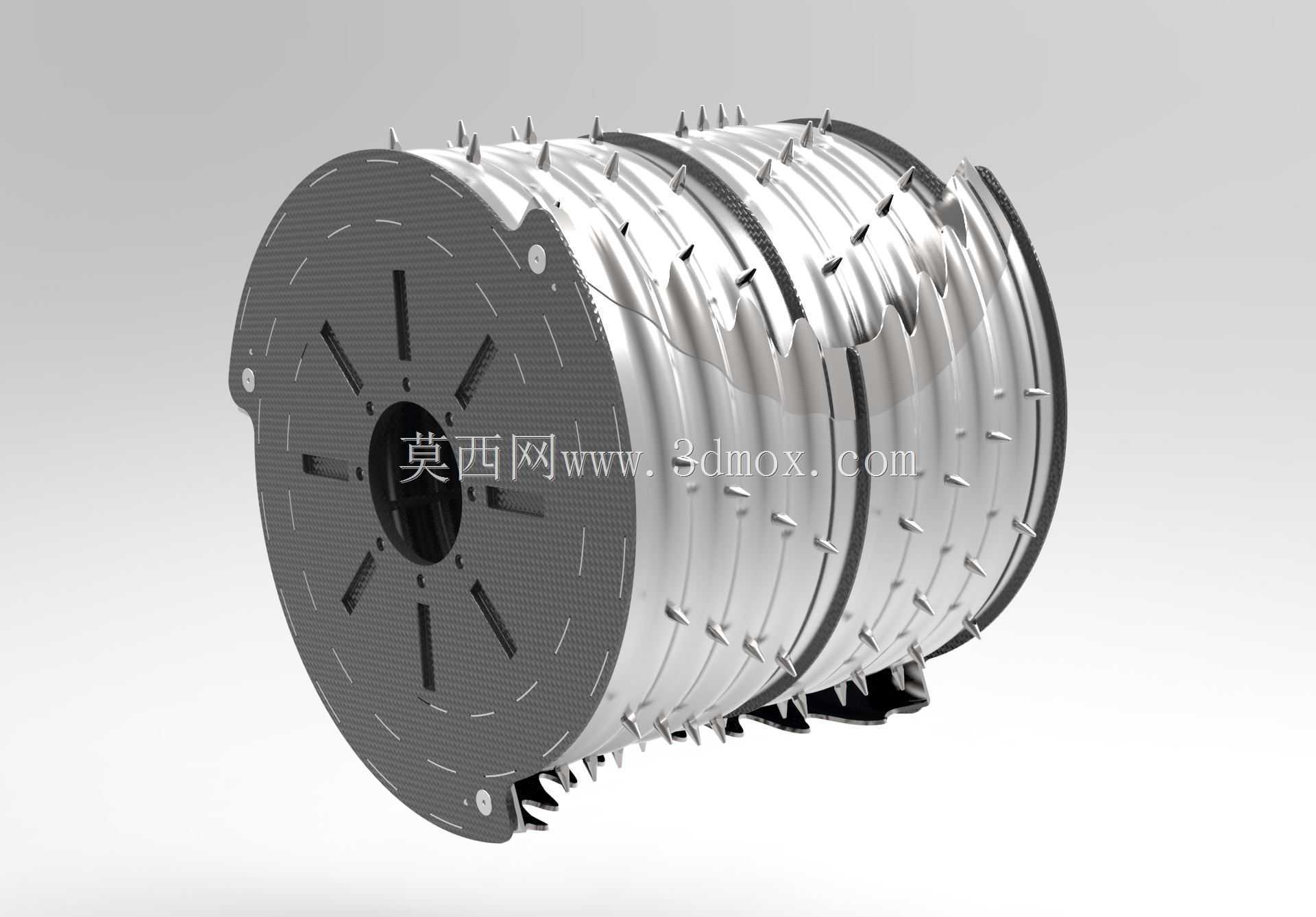




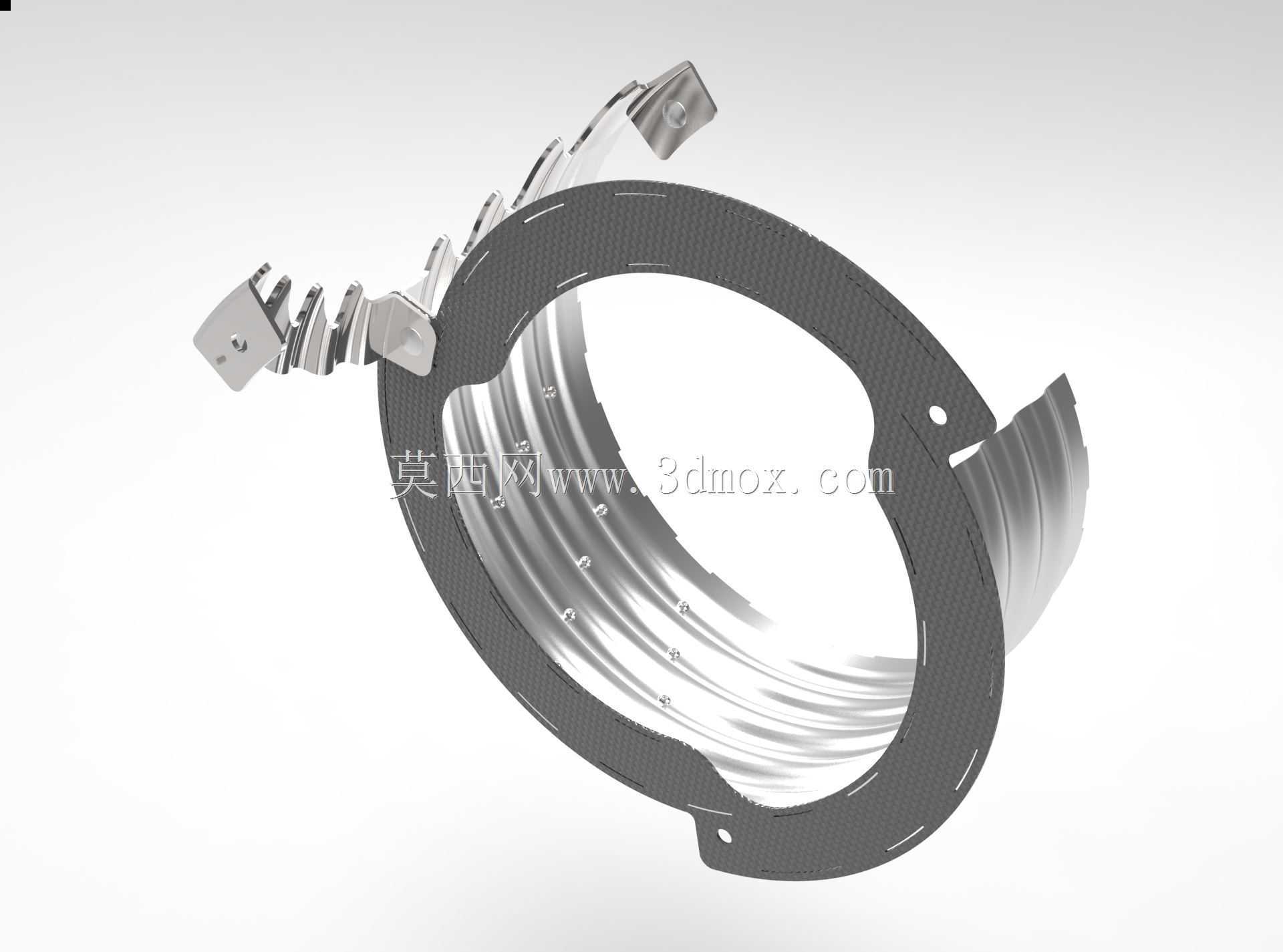

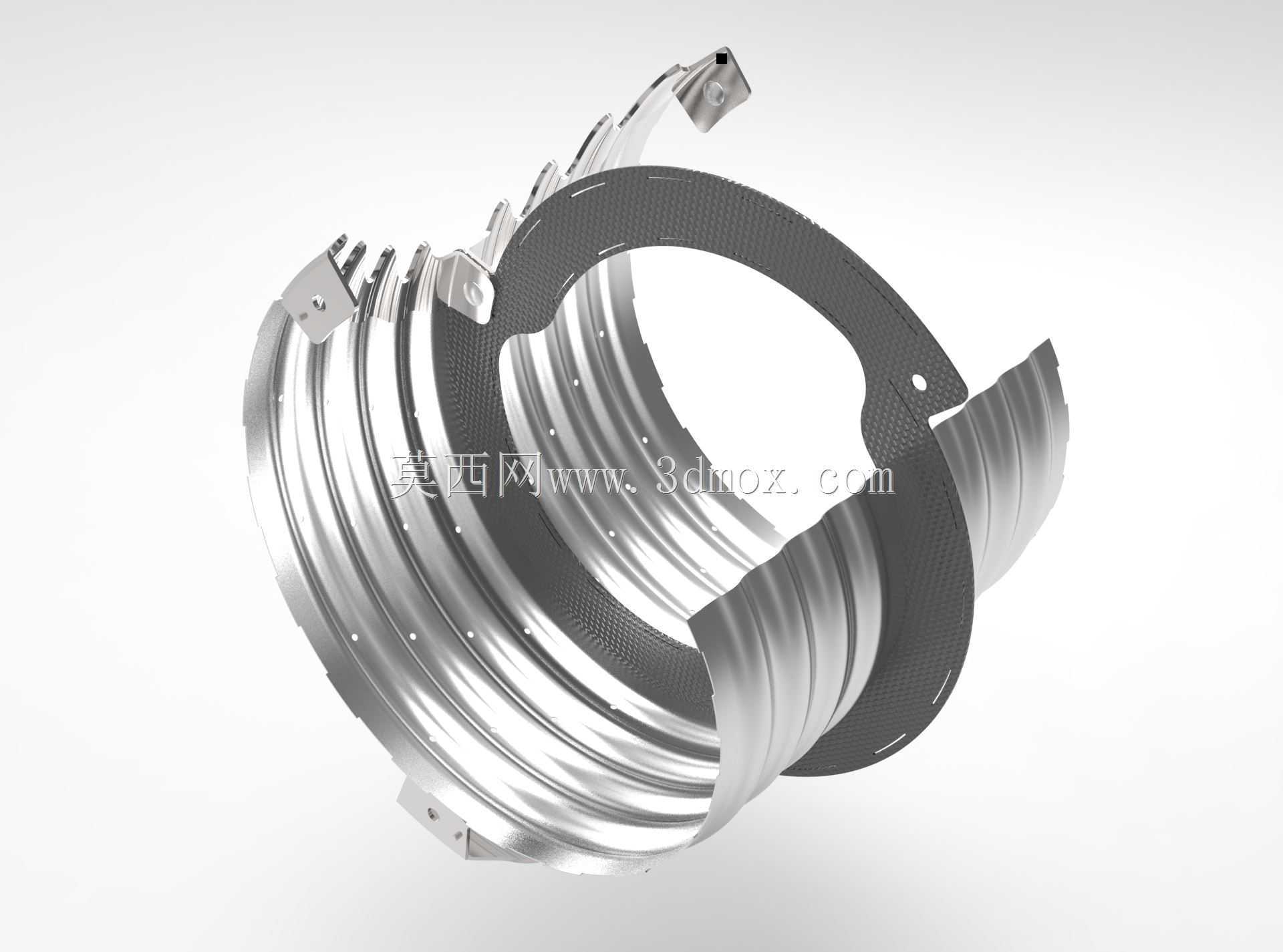



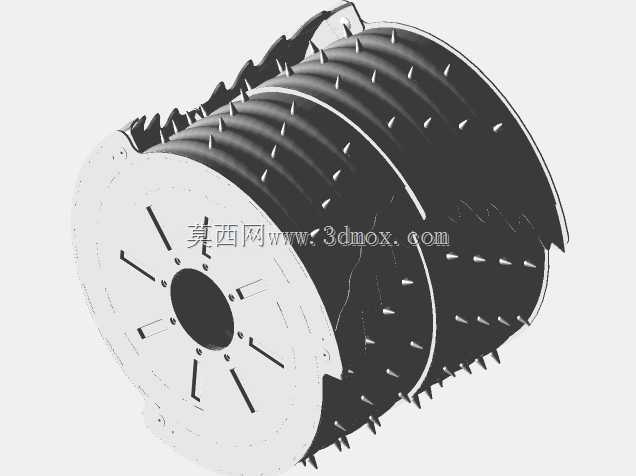
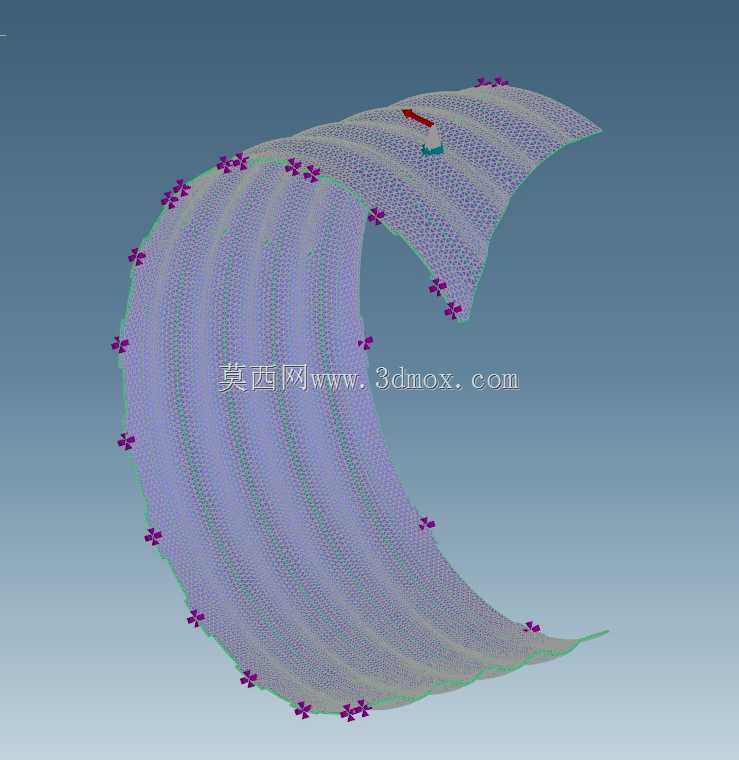
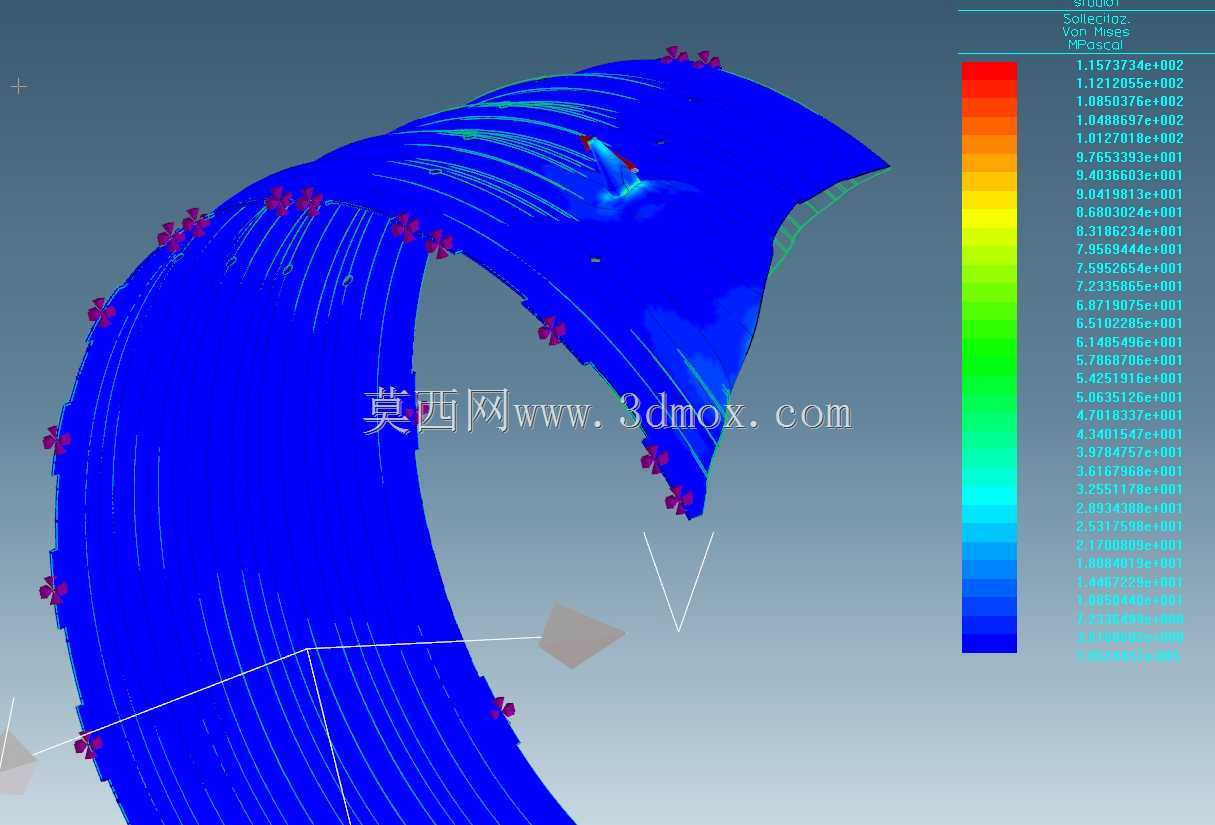
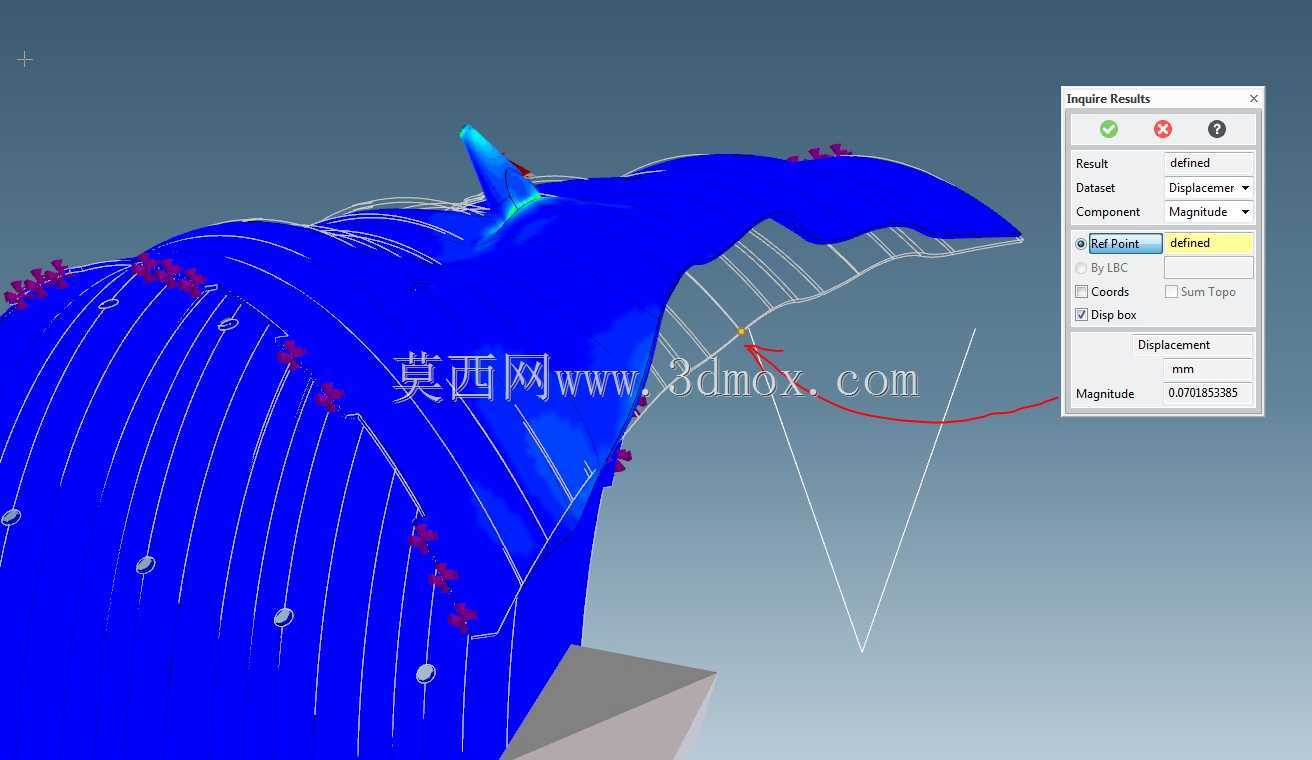
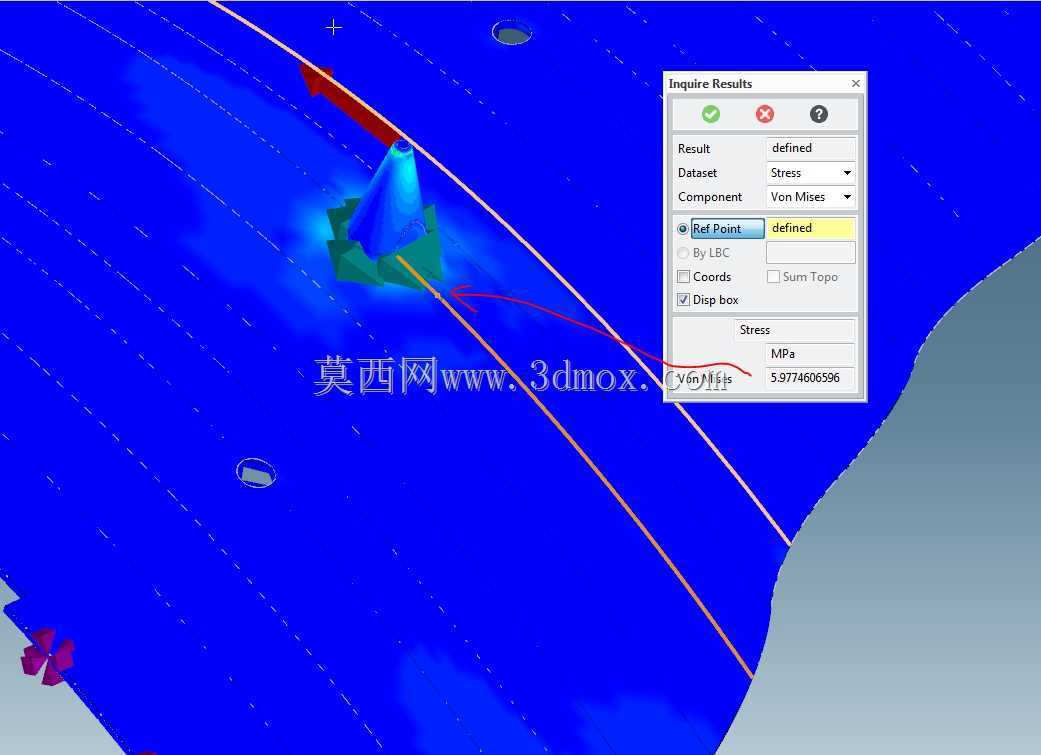
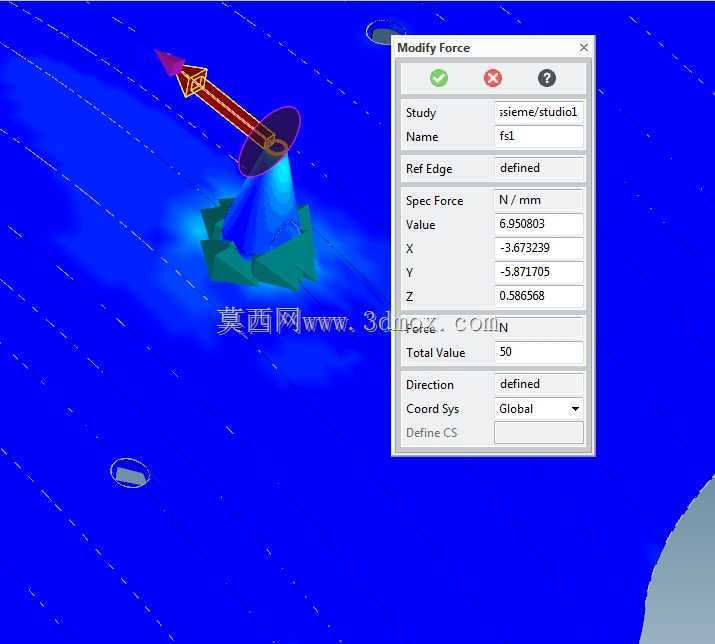
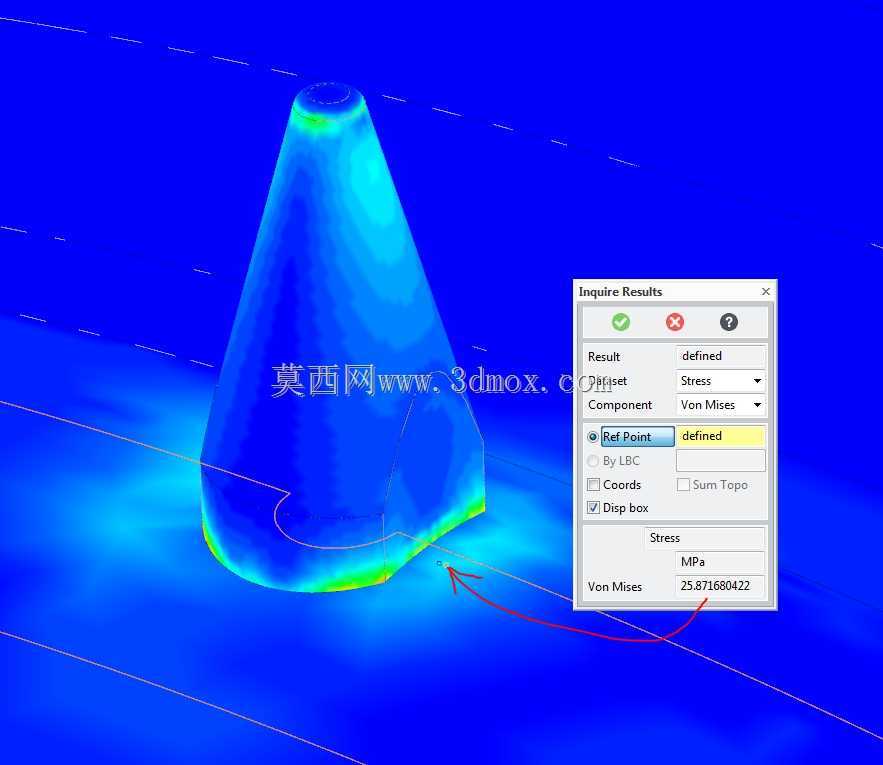
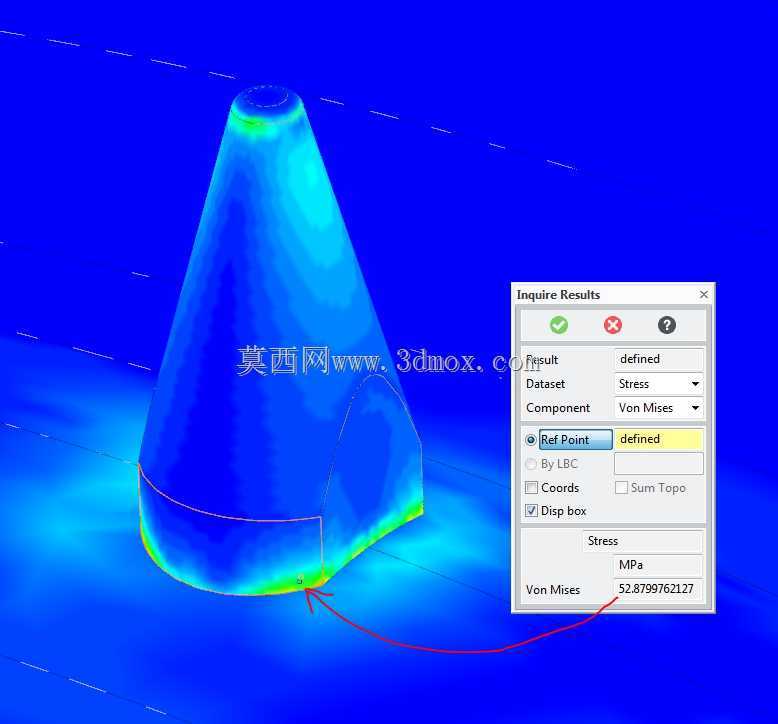
操作原理rassor滚筒的作用类似于铣刀,清除一层土壤并将其保留在空腔中。因此,最佳形状是一个螺旋,它将表土带到滚筒内,并通过反向转动将其释放。与铣刀一样,它可以顺时针或逆时针旋转,正如您在附件中看到的,结果是不同的。在我的模型中,如果滚筒逆时针旋转,装载口的边缘撞击从上到下移动的土壤外层,而逆时针方向它总是与地面接触,在提升过程中移除一层。每个旋转方向都有利弊。在第一种情况下,如果有一块大石头,它会被打入地面,阻碍旋转,而在第二种情况下,石头也会被提起并远离地面上爬行的一系列钉子,打碎压实的土壤并移除石头,但在第二种情况下,旋转产生前进阻力。我不知道rassor系统是否预见到完全由人工智能控制的驱动力,重要的是需要灵活处理最不同的操作情况。除了已经预见到的移动,我建议增加一个180度的翻转臂,如所附视频中所示,该臂支撑着一对鼓。通过这种简单的添加,旋转方向可以很容易地改变。除了这种内置机制,必须记住,四个鼓必须由两个镜面反射对组成,通过改变驱动法兰的安装侧,可以获得许多操作组合。继续与铣削工具进行类比,嘴的边缘必须具有螺旋形,以减少旋转阻力,并且必须对称布置,以避免支撑臂上的侧向推力。原则上,除了已经提供的更为简单的标准外,我更倾向于避免移动部件=考虑到恶劣的操作环境,更高的可靠性存在灰尘、温度变化和微重力的条件。作为负载能力,我可以假设25-30个字的施工技术。rassor机器人使用手臂帮助其前进,并在意外落入孔中时恢复正确位置,滚筒必须足够坚固,以承受不同方向的作用力。侧盘采用1.5和2 mm厚的碳纤维制成,而螺旋形蜗壳采用航空铝制成。与福特tri motor和Junkers Ju-52等几架著名飞机的机翼相似,它们的波纹外形具有很强的阻力。使用带有波纹辊的小型压延机,从普通1 mm厚的矩形铝板开始,可以很容易地冷成型此轮廓。我附上FEA验证的图像,该图像显示了钉子边缘50 N推力引起的小变形。这些钉子是钛合金制成的,锁紧螺钉是不锈钢制成的钢。装载喷嘴由一块3 mm厚的钛合金板加固,钛合金板的形状为齿形。整个滚筒使用铝铆钉组装,并通过驱动法兰的螺钉固定。尺寸在允许范围内,滚筒总重量为4864 kg


- 模型大小 :201.43 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,Rendering,STL,Rendering,Rend