表土高级收集器(RAC)


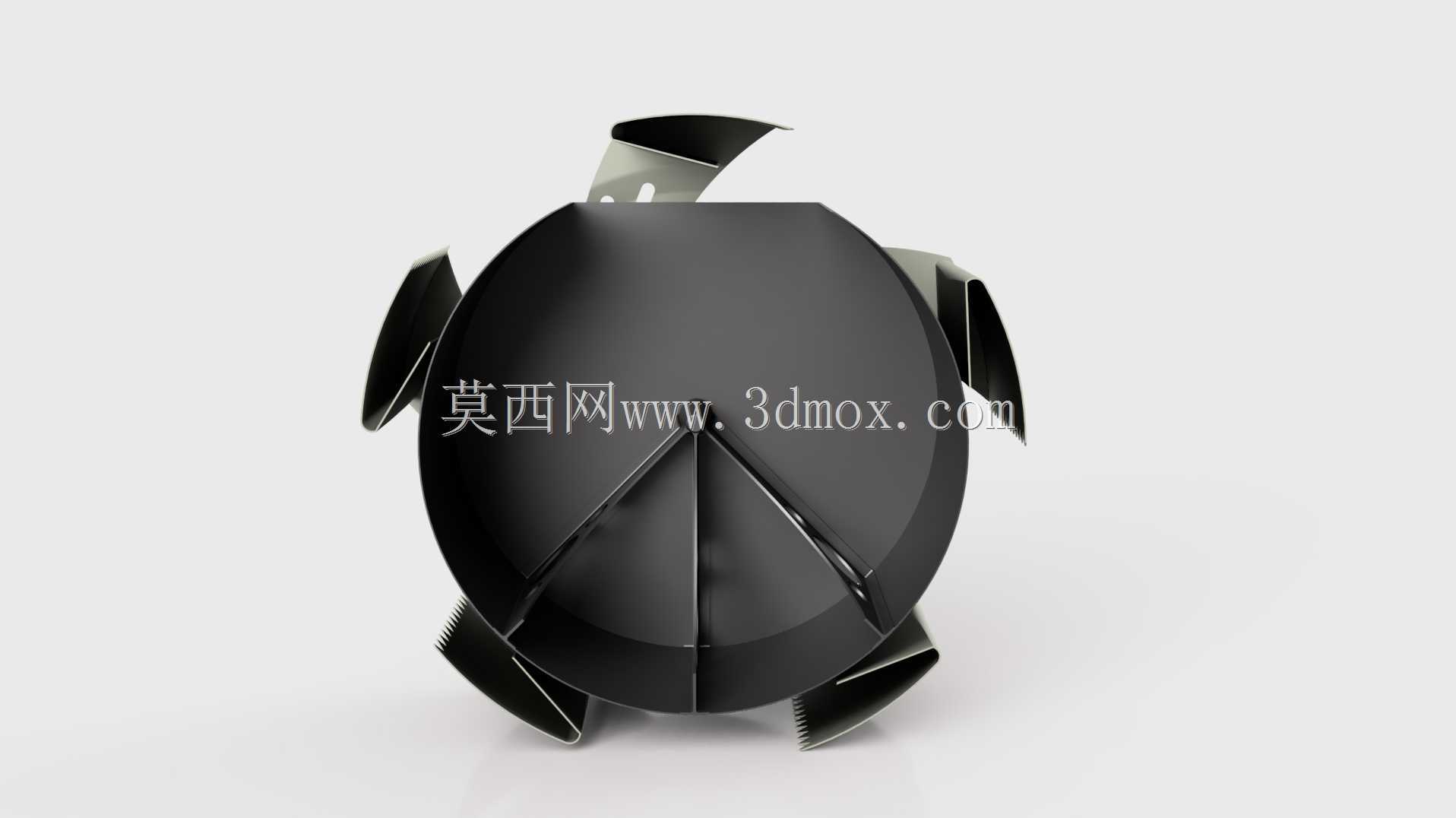

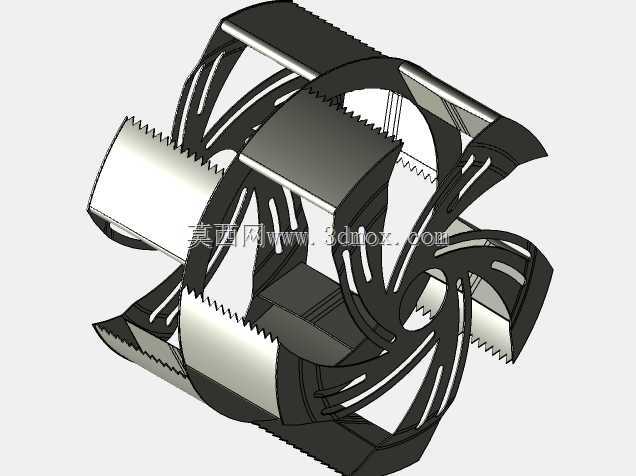



该设计由两个主要部分组成:开顶铲斗和旋转铲。它在铲斗轴的每一端使用两个单向轴承(楔块离合器轴承),如设计中使用的Tsubaki BB25-2K-K。其中一个铲斗轴连接到旋转外铲的主轴,然后连接到RASSOR主驱动轴。当外部电铲逆时针旋转时,轴承的离合器将锁定并传递扭矩,以向下旋转铲斗开口。电铲顺时针旋转以收集表土,并在到达顶部时将其倒入铲斗中。铲斗装满后,可通过逆时针方向旋转外铲卸下铲斗。卸载过程完成后,铲斗开始顺时针旋转,铲斗将借助重力返回其原始位置(开口面朝上)。这可以通过将铲斗质心从轴上降低来实现。一旦主轴停止旋转,多余的表土不会溢出,重力应保持铲斗开口在顶部。当铲斗装满时,它最多可容纳31.5升表土,这是允许容积(57.2升)的55%。理论上,电铲应在大约17至20圈内装满铲斗,并可在2圈内卸载。其质量为4.8 kg,采用6061铝合金材料
标签:
------分隔线----------------------------
- 上一篇:教程:Solidworks 2017
- 下一篇:美国宇航局月球取样演示

说点什么吧
- 全部评论(0)

还没有评论,快来抢沙发吧!
- 模型大小 :16.63 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STL,STEP / IGES,Rendering,STEP / IGES,STEP / IGES,STEP / IGES,STEP / IGES