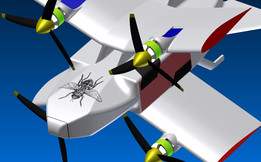
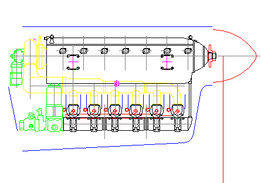
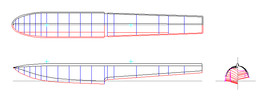
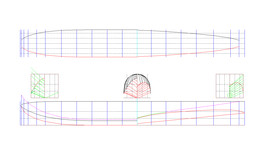
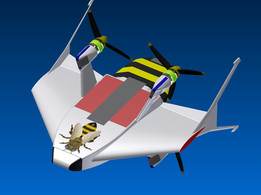
独立滑翔机牵引(概念系统)
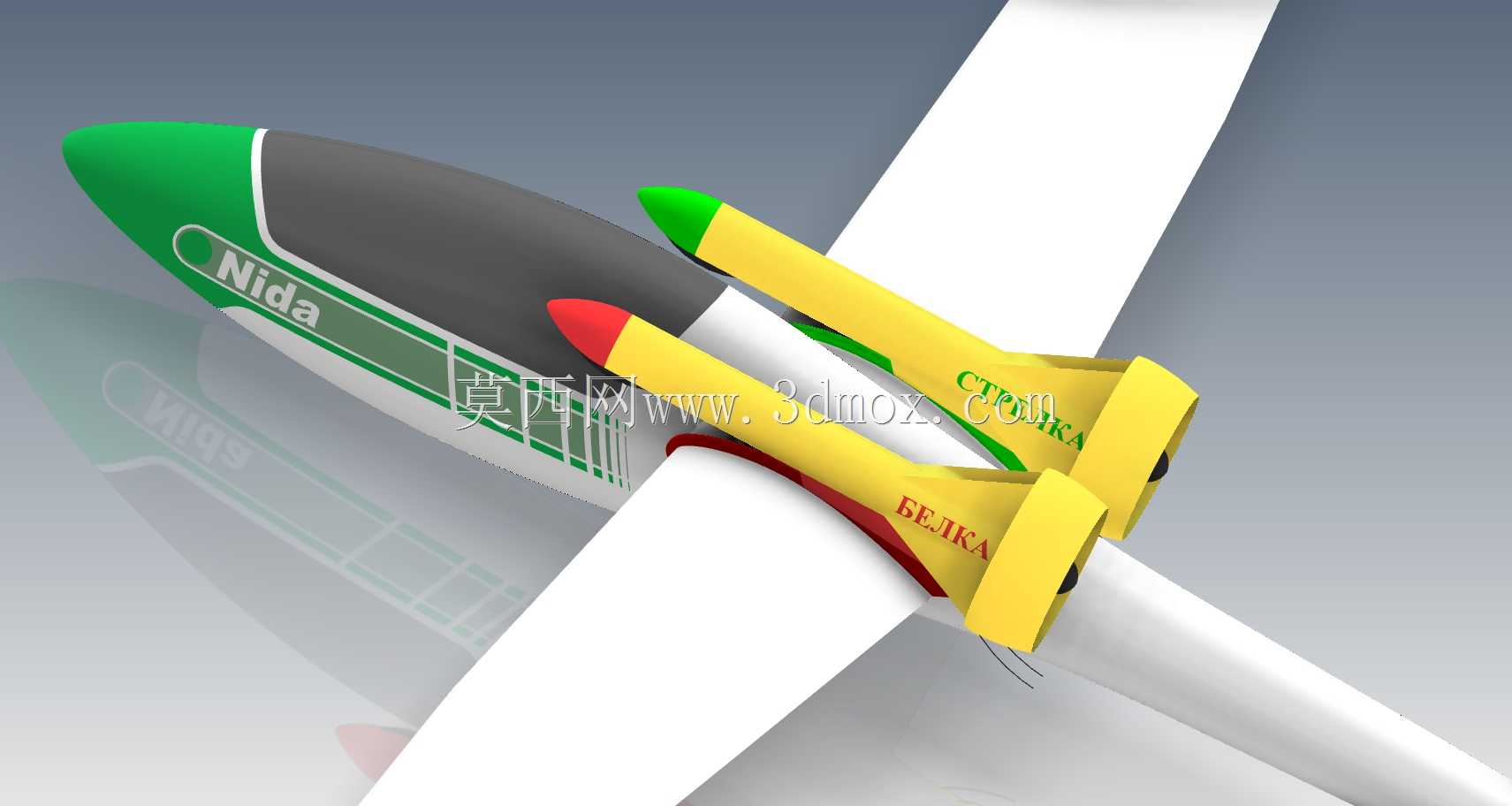
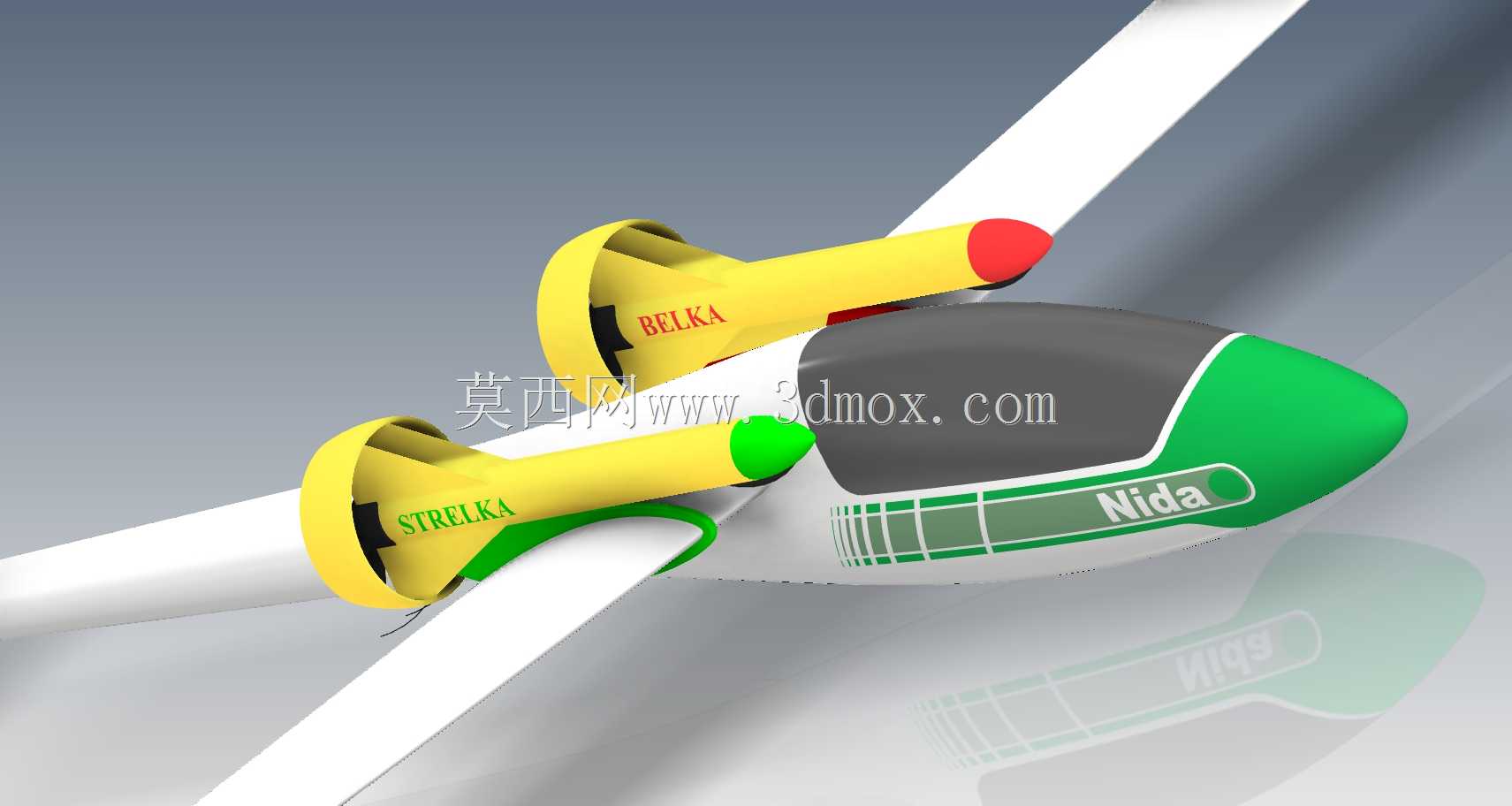
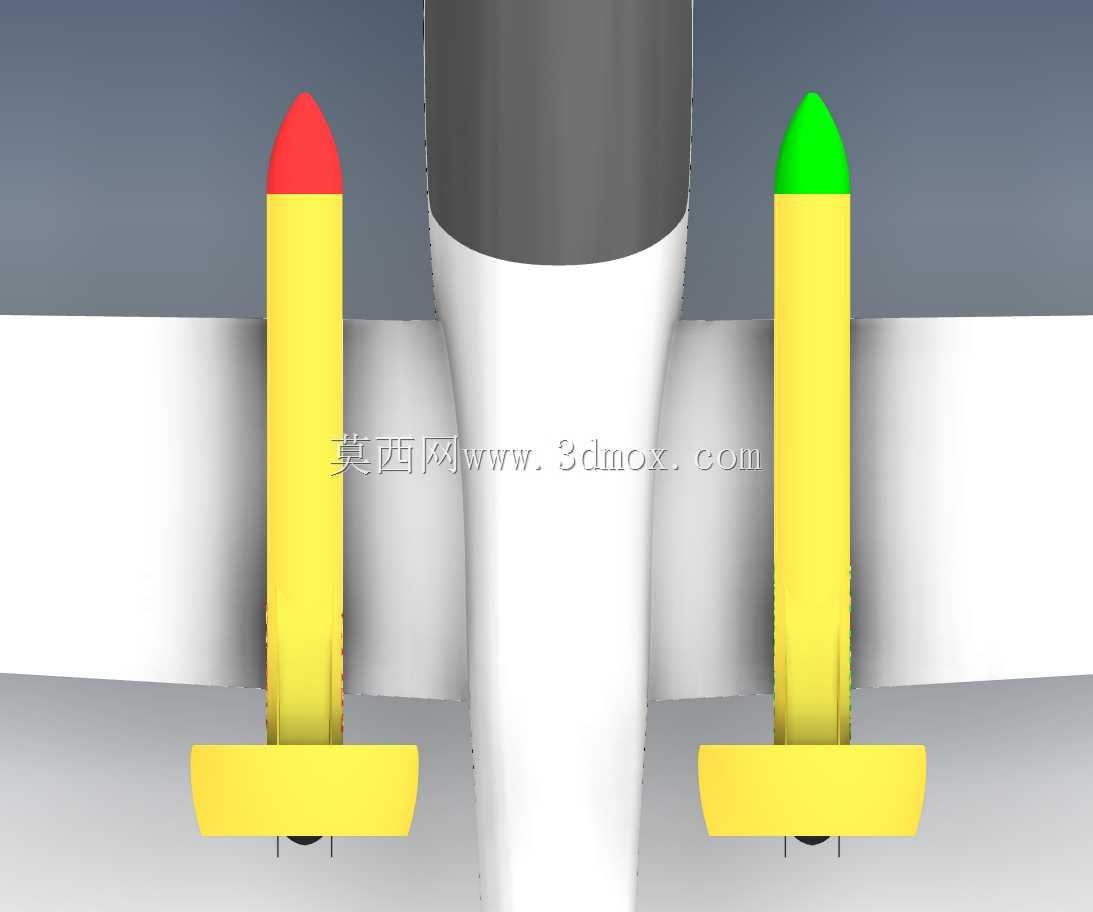
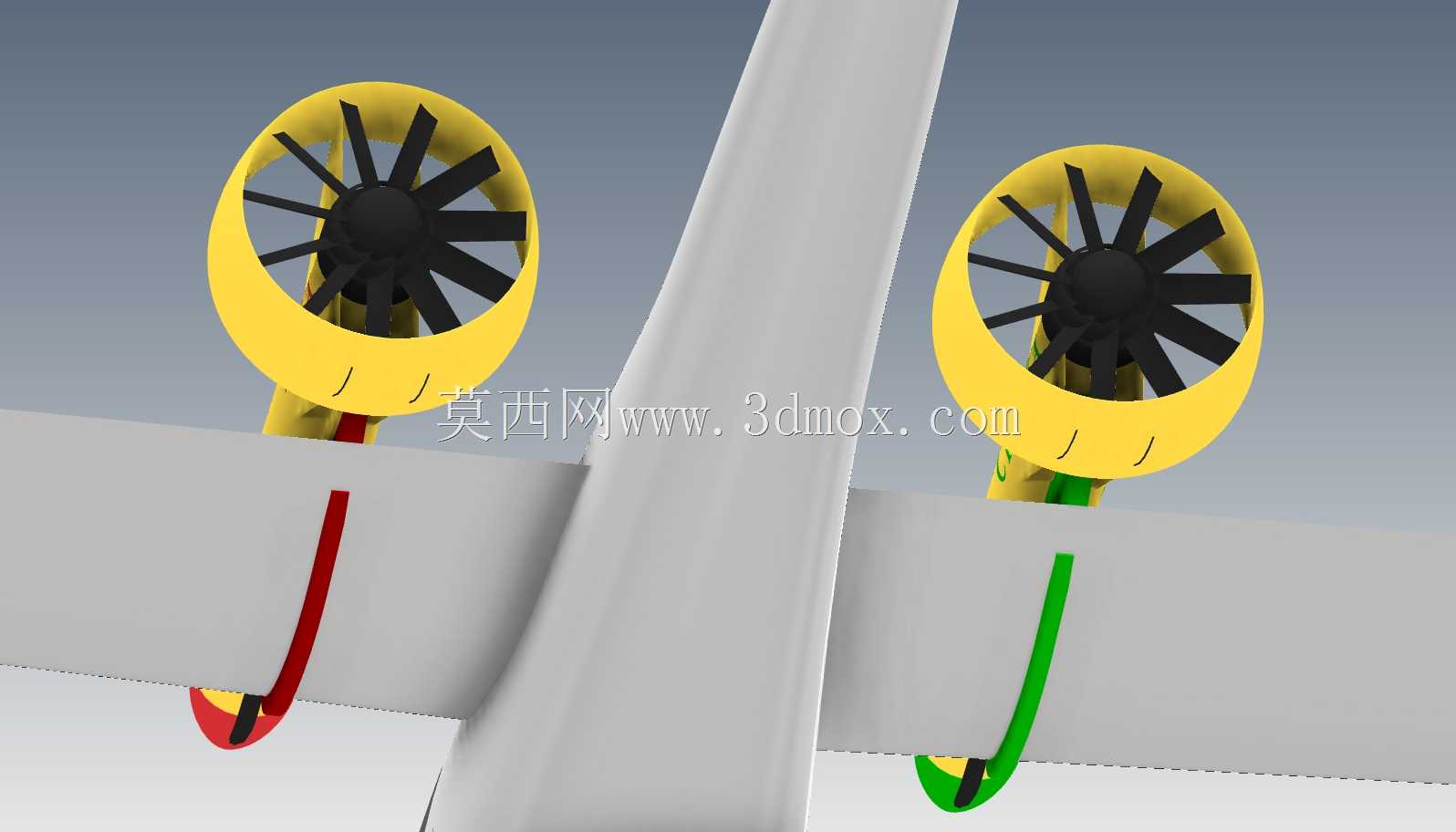
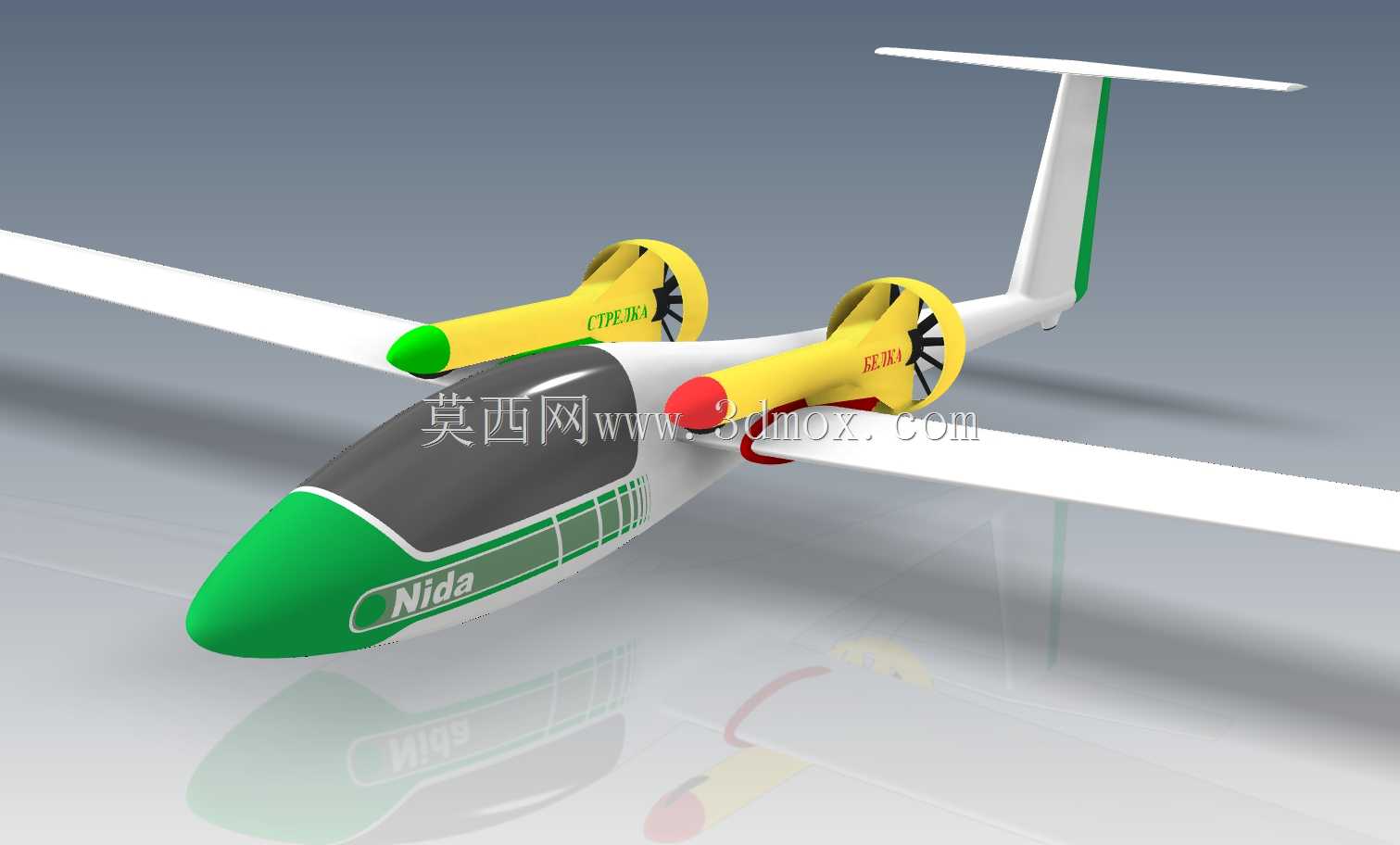
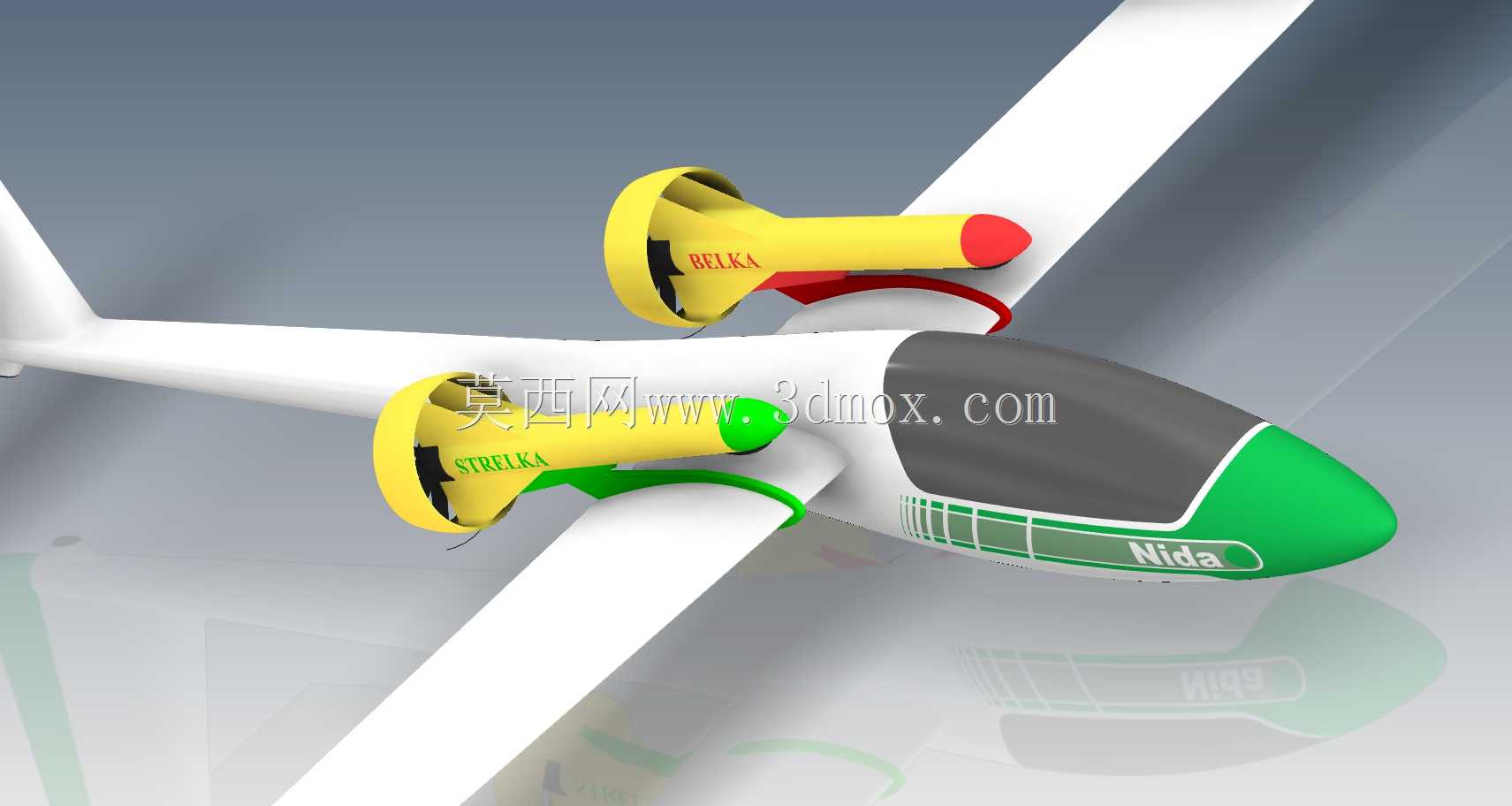
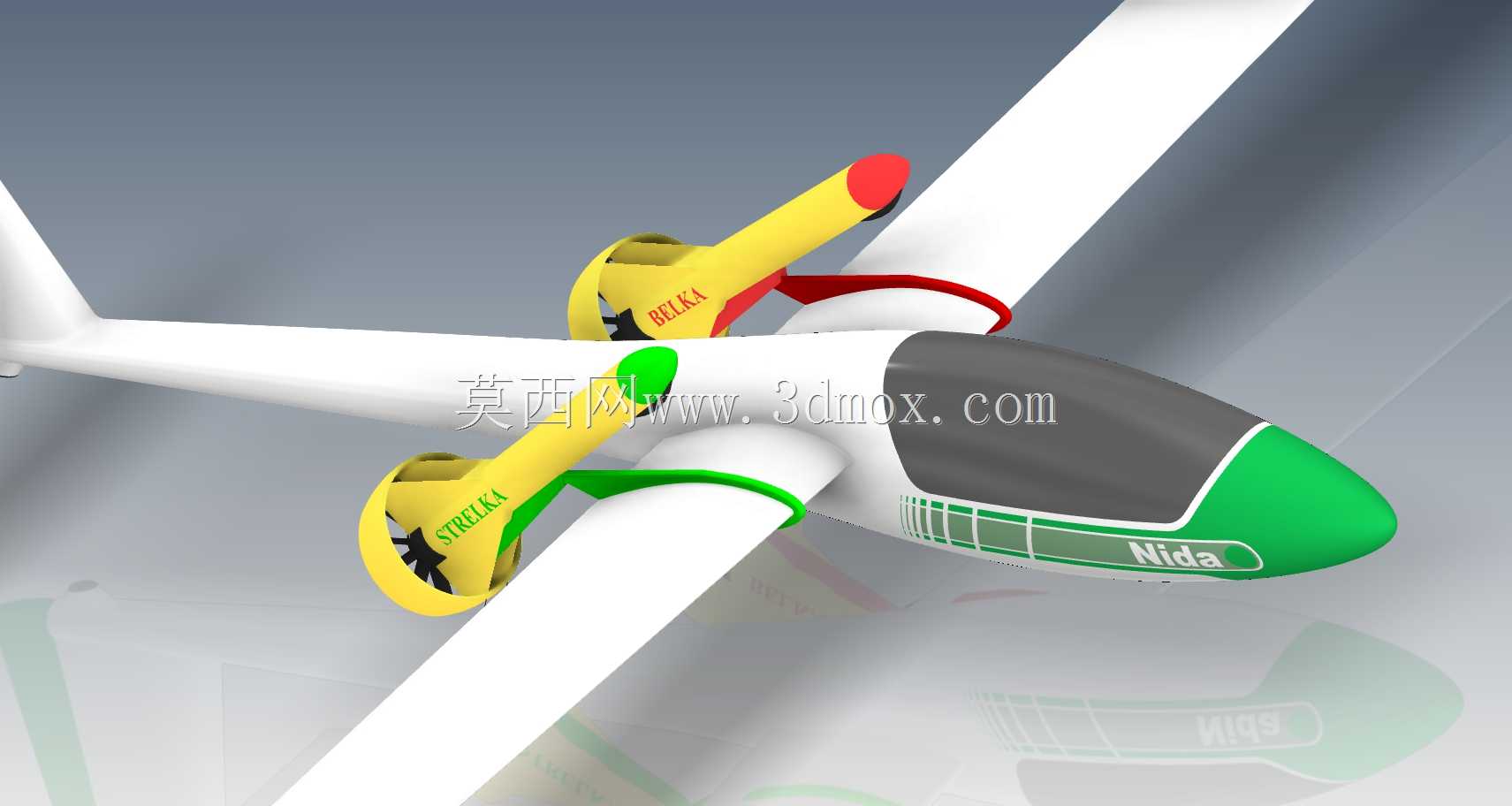
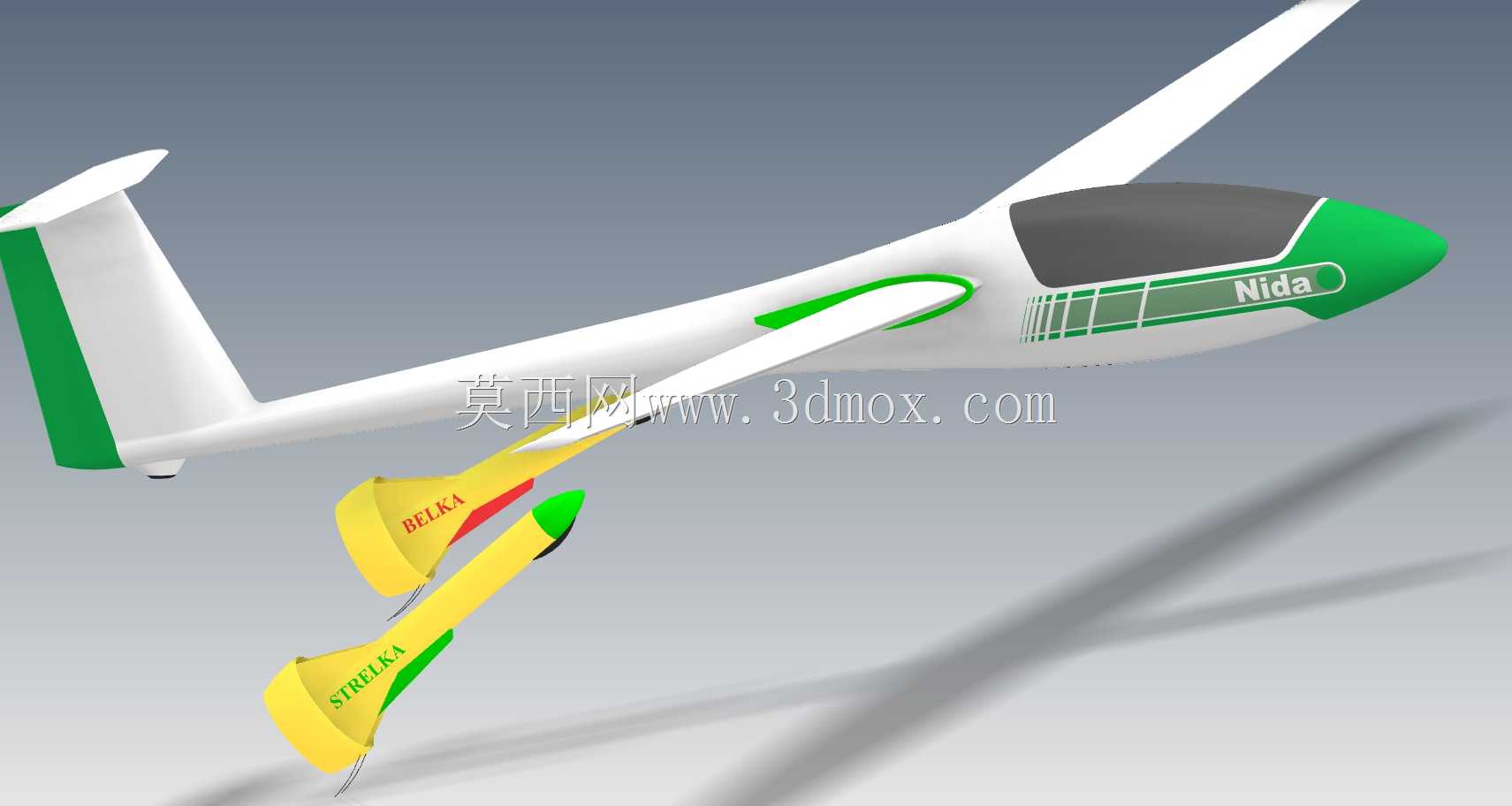
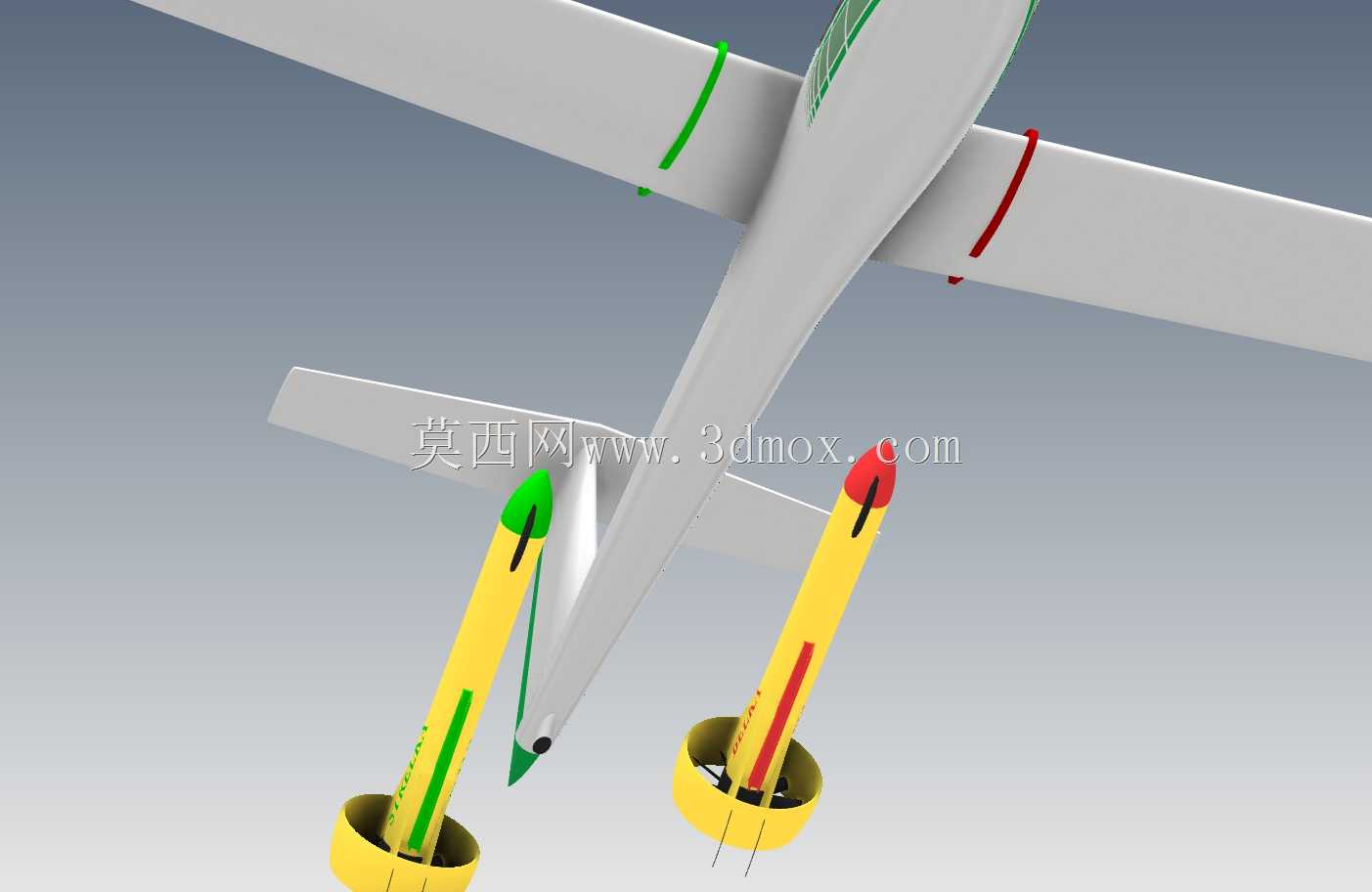







独立滑翔机拖曳(概念系统)我带着Nida滑翔机在中展示我的系统,由Antanas Sulskis设计――我的感谢滑翔机LAK-11 NIDAP项目在进化中!它由两个相同的模块组成,安装在靠近中心部分的滑翔机机翼控制台上。在完成多个设计选项后,选择了两个单独的模块。一些规格的动力装置EMRAX 188电动机,重量6.8 kg峰值功率70 kW连续功率28 kW 7000 RPME-BAMO-D3控制器,重量6.5 kg电池元件3.6 V 1500 mAh 8C(12 A)尺寸76x40x6.5 mm重量35 g物品数量450 2.4 kWh 16 kg预计模块重量小于40 kg。预计运行时间6-8 min功率模式针对每次飞行进行了优化。滑翔机到达航线后,牵引模块复位并跳伞。计划由自主机载系统(GPS定向和激光高度计)控制的降落伞。该计划考虑到电池的剩余电量,确保模块安全且尽可能靠近发射场着陆。着陆时有三个缓冲点:一个前滑雪板和两个后弹簧。适配器保留在滑翔机的机翼上。每个特定型号的滑翔机的单独适配器都固定在机翼上,不会损坏机翼,并确保襟翼的正常操作。Autodesk Inventor 2020降落伞模型是固态的,不要求逼真。Belka&;斯特雷尔卡;Саааа)-第一只从太空飞行中活着回来的狗(苏联,1960年8月)
标签:


- 模型大小 :178.18 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,Other,STEP / IGES,Rendering,Other,Rendering