小型陆地无人机#1.立方体。



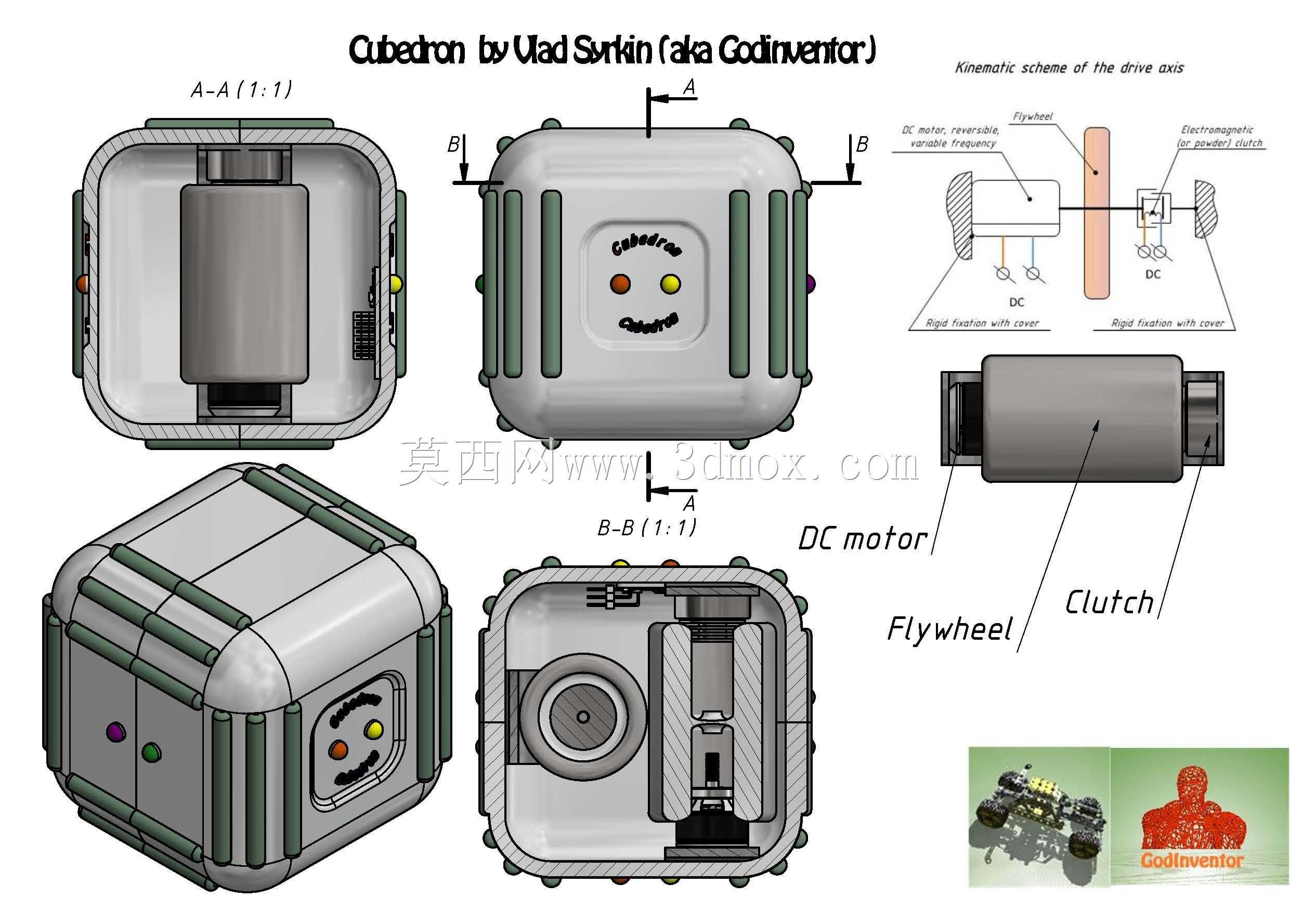

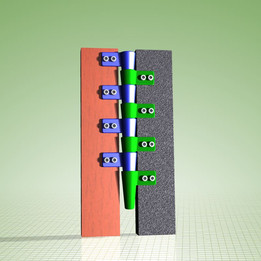
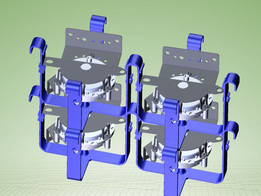
我正在开始一系列新的工作,致力于“小型陆地无人机”这一主题。为什么是小型的?我们(在所有意义上)资源有限。因此,这项任务更加困难,也更加有趣。我们需要一个简单、廉价、可行(生存)的机制。为什么要用土地?空气和水这是一个统一的环境。地面上的移动问题很难解决。想象一下一片森林。很难移动吗?对但老鼠不这么认为:-)我几乎没有涉及到以下方面:控制系统,无人机的有效载荷(功能),能源。我想到了运动系统,所以第一个无人机是“立方体”。父母和亲属:库布里(http://www.idsc.ethz.ch/research-dandrea/research-projects/cubli.html),麻省理工学院自组装小立方体(https://www.technologyreview.com/s/523576/cubes-that-self-assemble/) .. 立方体看起来不像父母。这非常非常简单。运动基础:飞轮产生的反作用扭矩,由直流电机驱动。有两种运动类型:缓慢平衡运动(如Cubli)。如果你加速方向盘,然后打开离合器,那将是一次快速跳远。形状无人机不一定是立方体,可以是球、四面体、二十面体、十二面体……离合器不一定总是紧密连接,可能滑动可调。待续


- 模型大小 :85.76 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,Rendering,Other,Rendering