三角绘图机器人
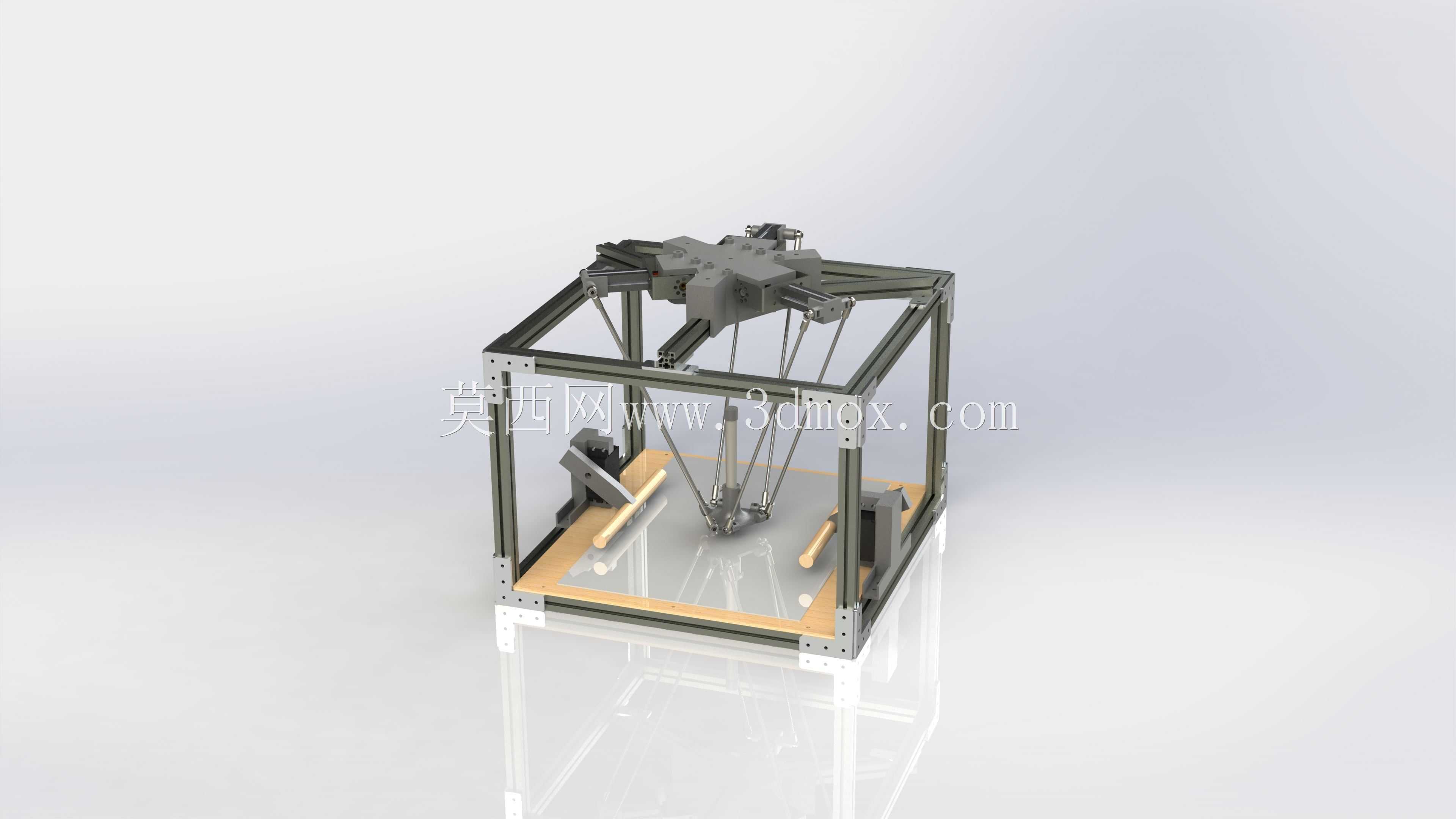





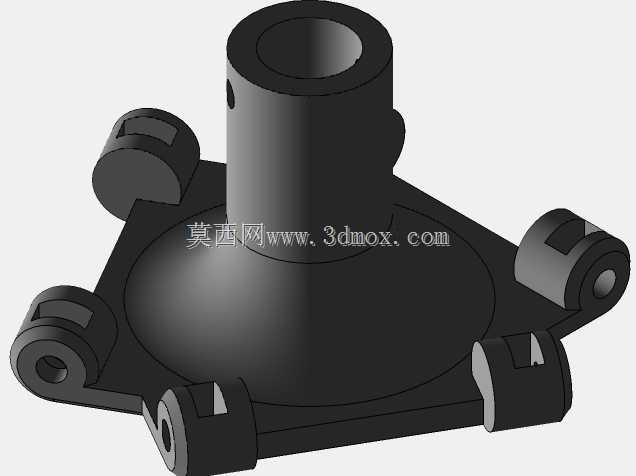
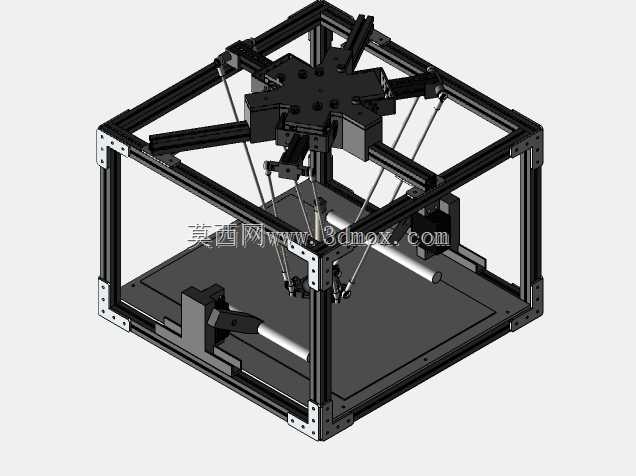














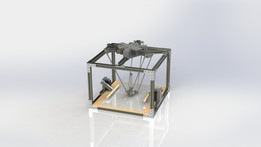
该项目是与Giovanni Fava合作完成的。该项目的特点是一个三角形配置的机器人操纵器,带有一支笔作为末端执行器。提示是让机器人手臂写下我们的姓名首字母,但我们的编程方式是,它接受以csv格式编写的任何坐标命令。大多数机器人都是用现成的组件制造的。MakerBeam XL、RC杆端、数字伺服电机、伺服驱动器和树莓Pi。一些连接件采用3D打印,以满足我们的定制需求


- 模型大小 :32.01 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,STEP / IGES,SOLIDWORKS,Rendering,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,Rendering,Other,Other,SOLIDWORKS,Other,Other,Other,Other,Other,SOLIDWORKS,SOLIDWORKS,Other,SOLIDWORKS,Other