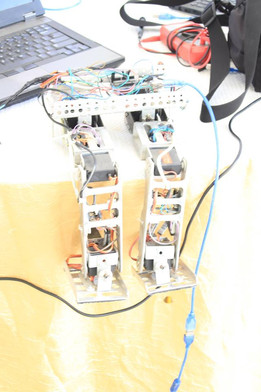
机器人外骨骼
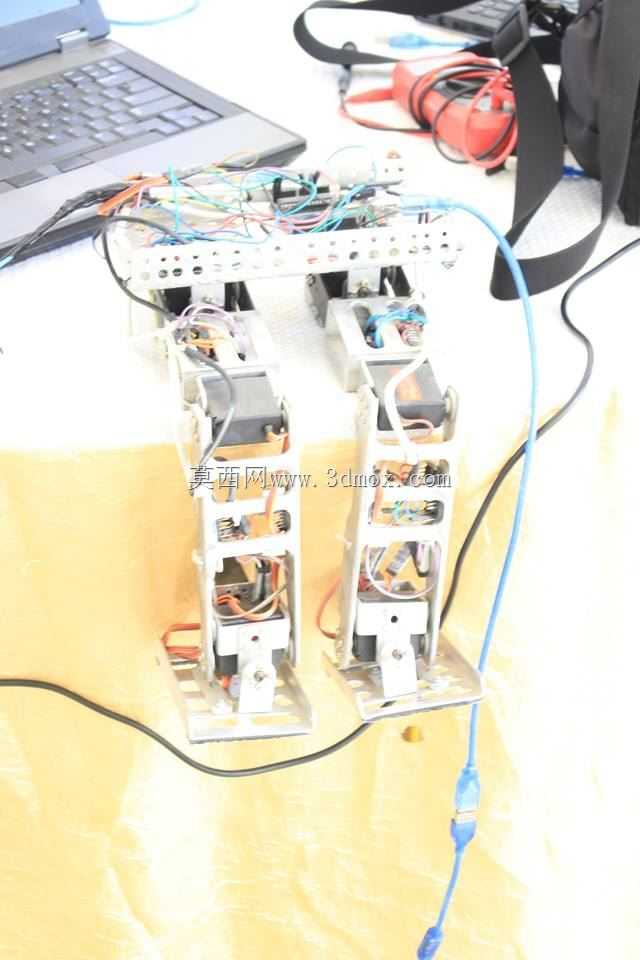
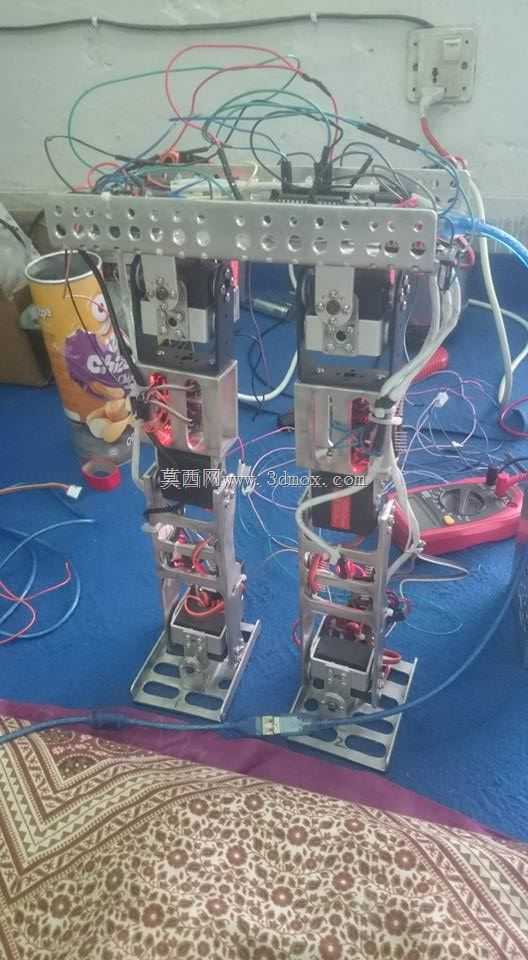


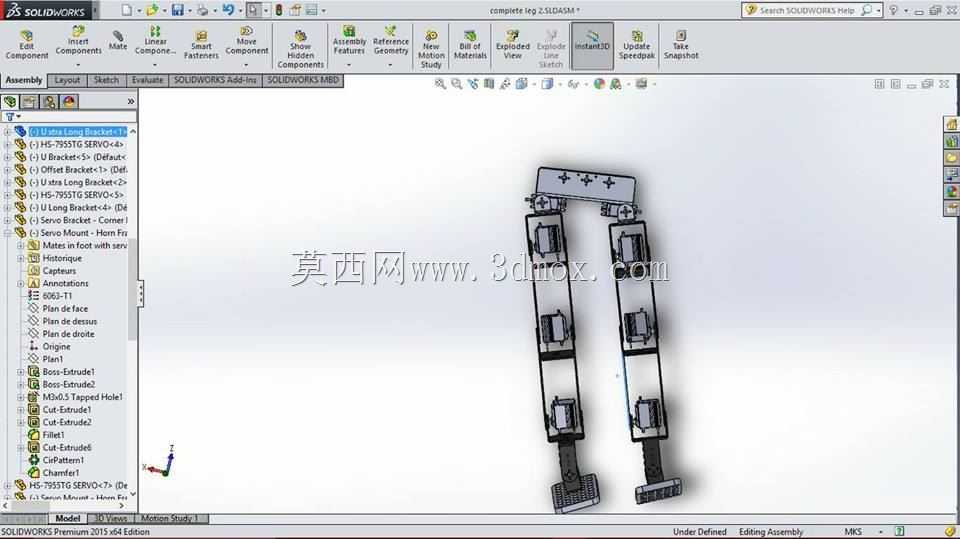
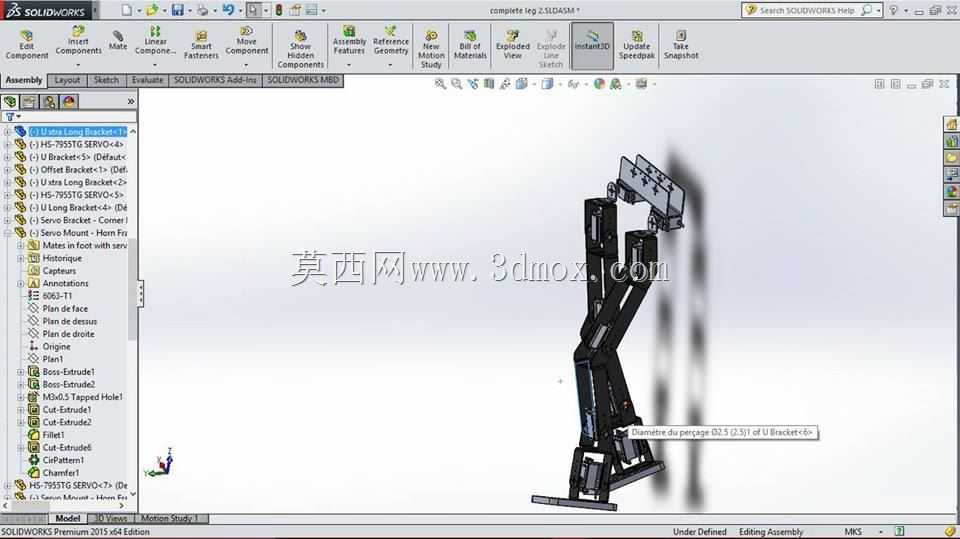


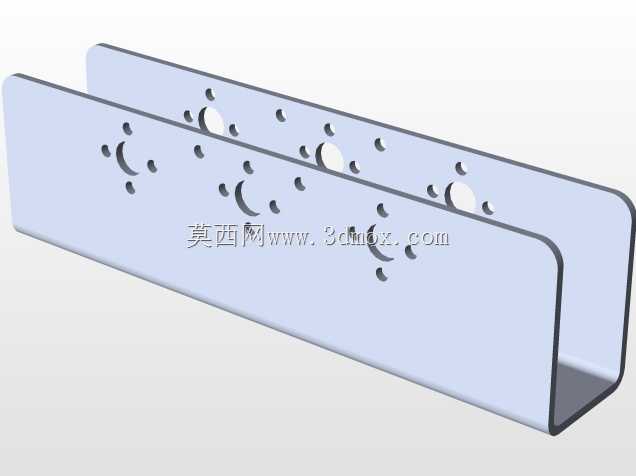

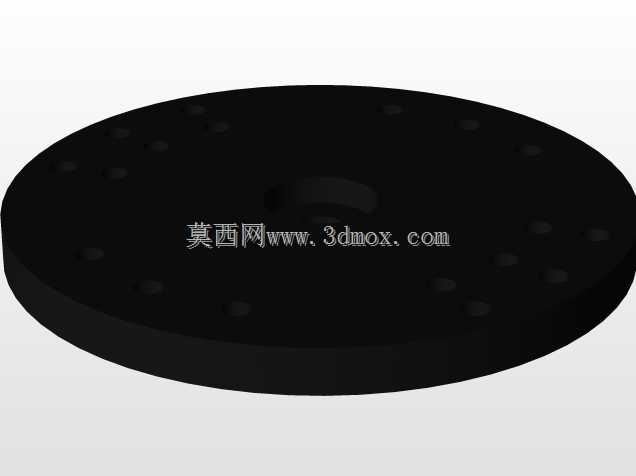


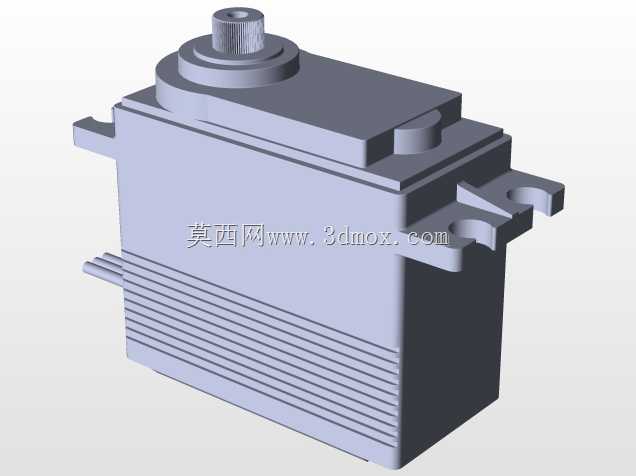


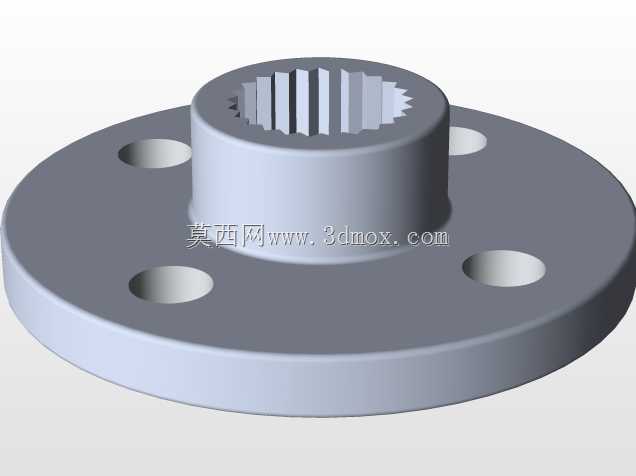



该项目旨在设计和制造外骨骼机器人,该机器人可以进行类似于人体肢体的运动。高扭矩伺服装置用于关节旋转和连杆运动
标签:


- 模型大小 :3.42 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS,Rendering,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,Rendering,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS