Quanser 2DSFJ

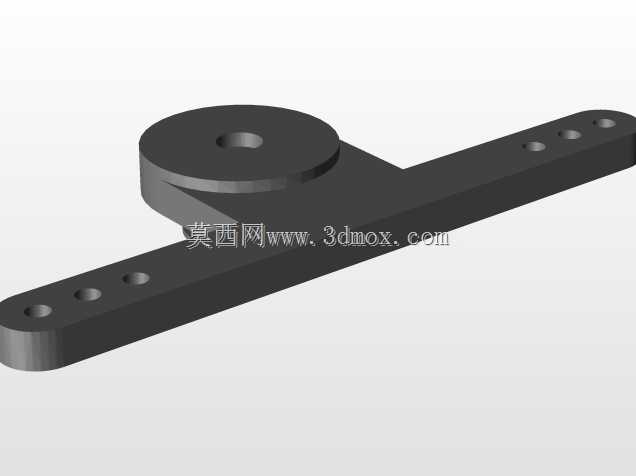
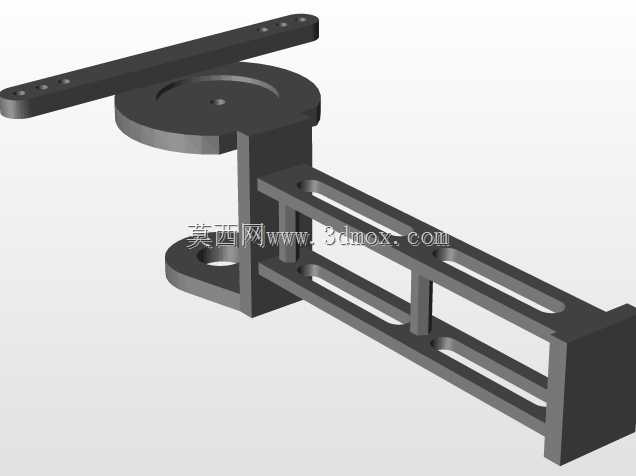
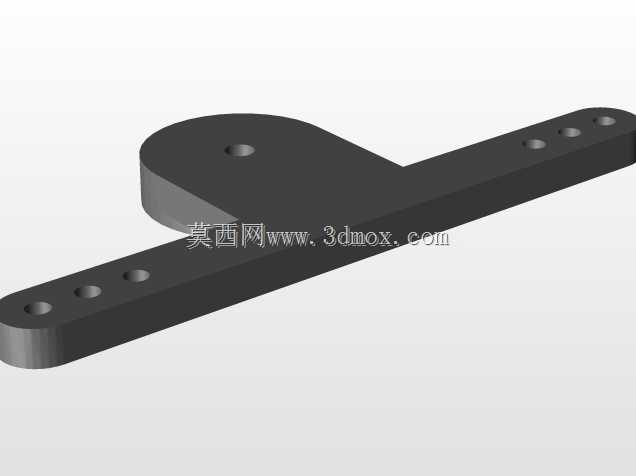


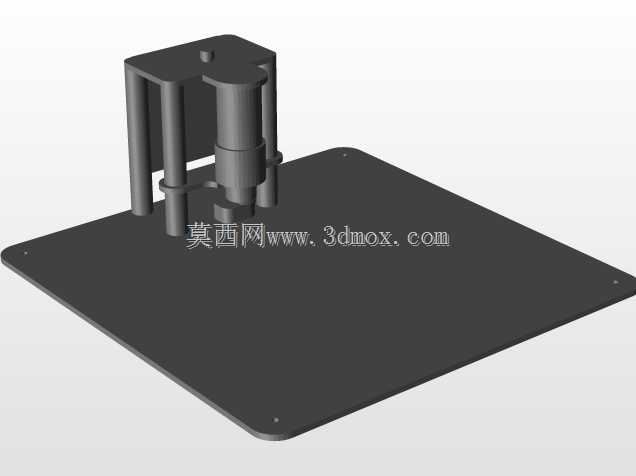
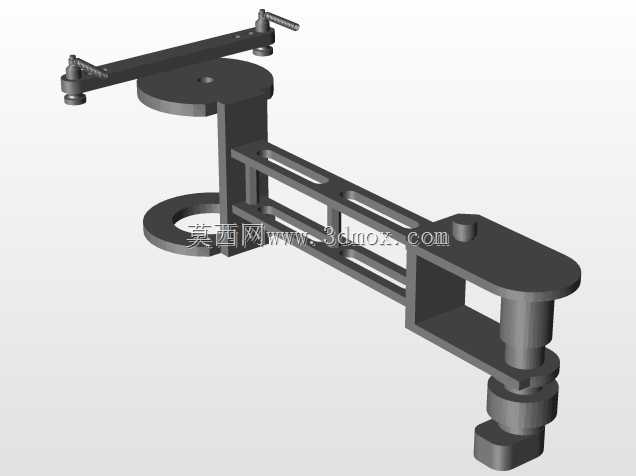
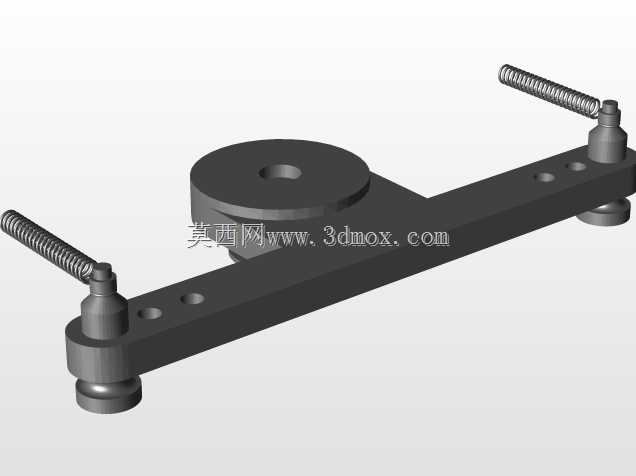
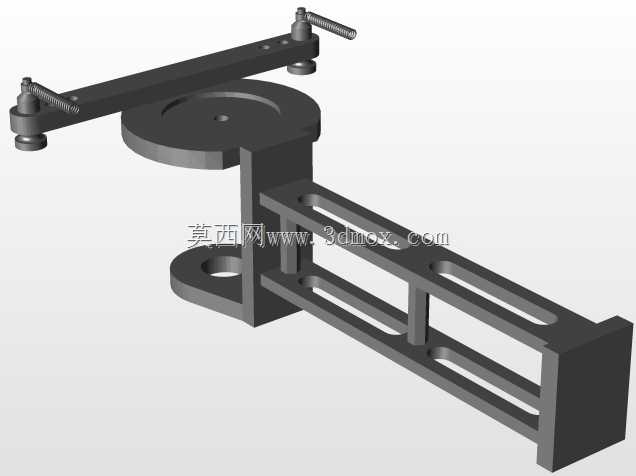
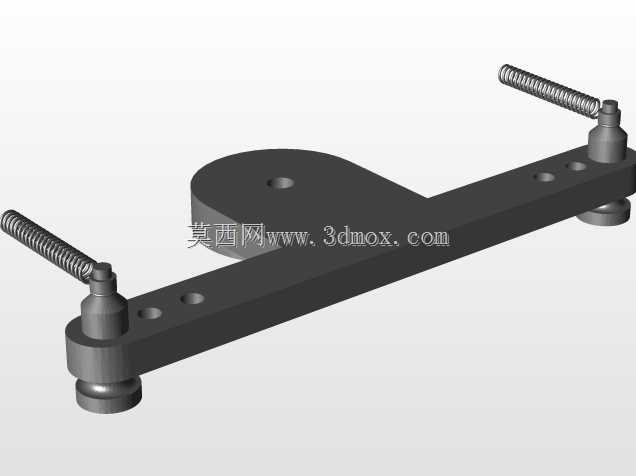

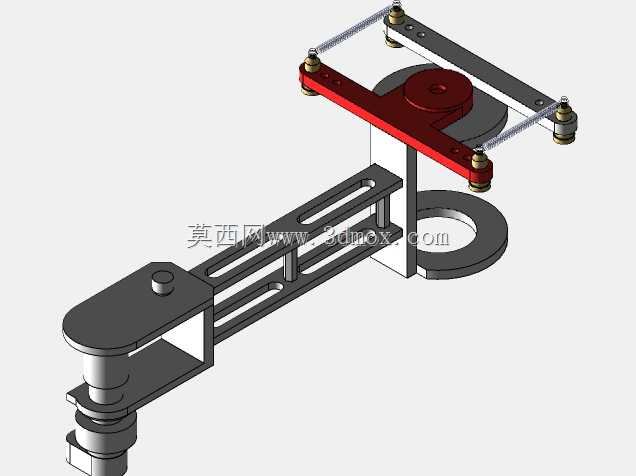
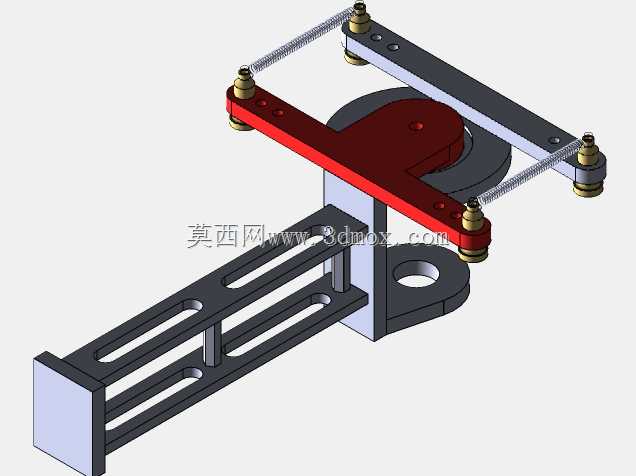
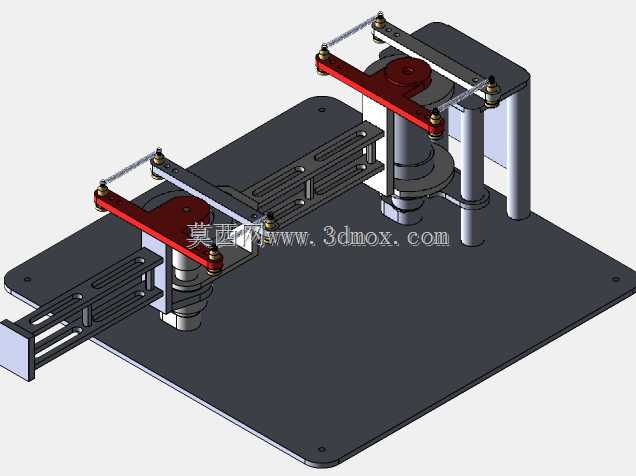
Quanser 2自由度串联柔性关节机器人的近似模型。一些尺寸取自手动,而另一些尺寸取自组装机器人的测量。缺少几个部件,测量结果可能更好,但在必要时可能会有用。以“部件”开头的文件表示组成机器人的几个部件,如果它们的来源共享相同的位置,则构成整个机器人。以“链接”开头的文件经过优化,可用于机器人模拟器,如ROS和Gazebo,它们的起源与德纳提夫・哈滕伯格公约的起源一致
------分隔线----------------------------
- 上一篇:3D打印机结束停止
- 下一篇:Freefly Movi快速释放支架

说点什么吧
- 全部评论(0)

还没有评论,快来抢沙发吧!
- 模型大小 :82.84 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,Rendering,STL,STL,STL,STL,STL,STL,STL,STL,STL,STL,STL,STL,STL,STL,STL,STL,STL,STL,STL,STL,STL,STL