

四足机器人



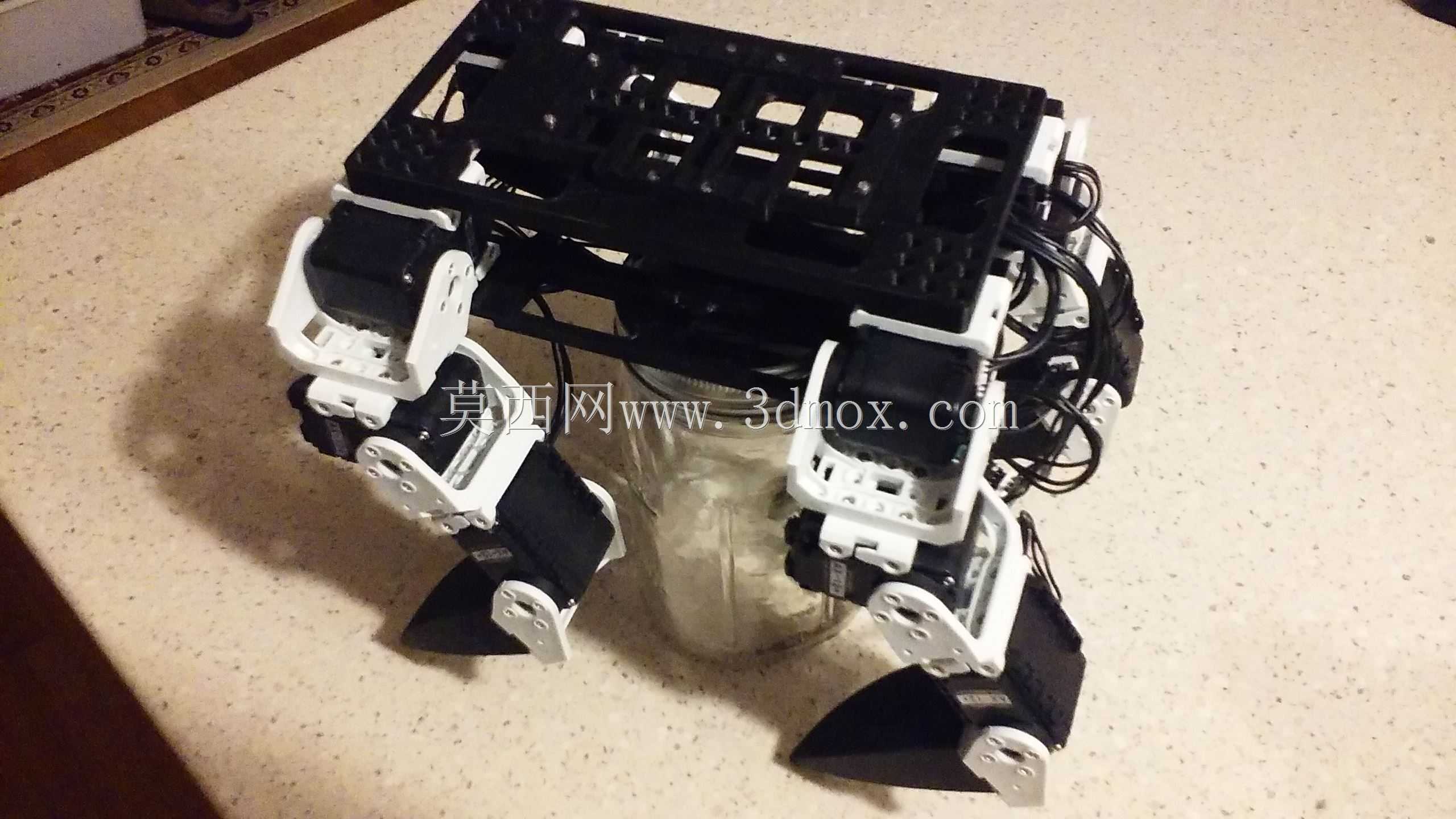
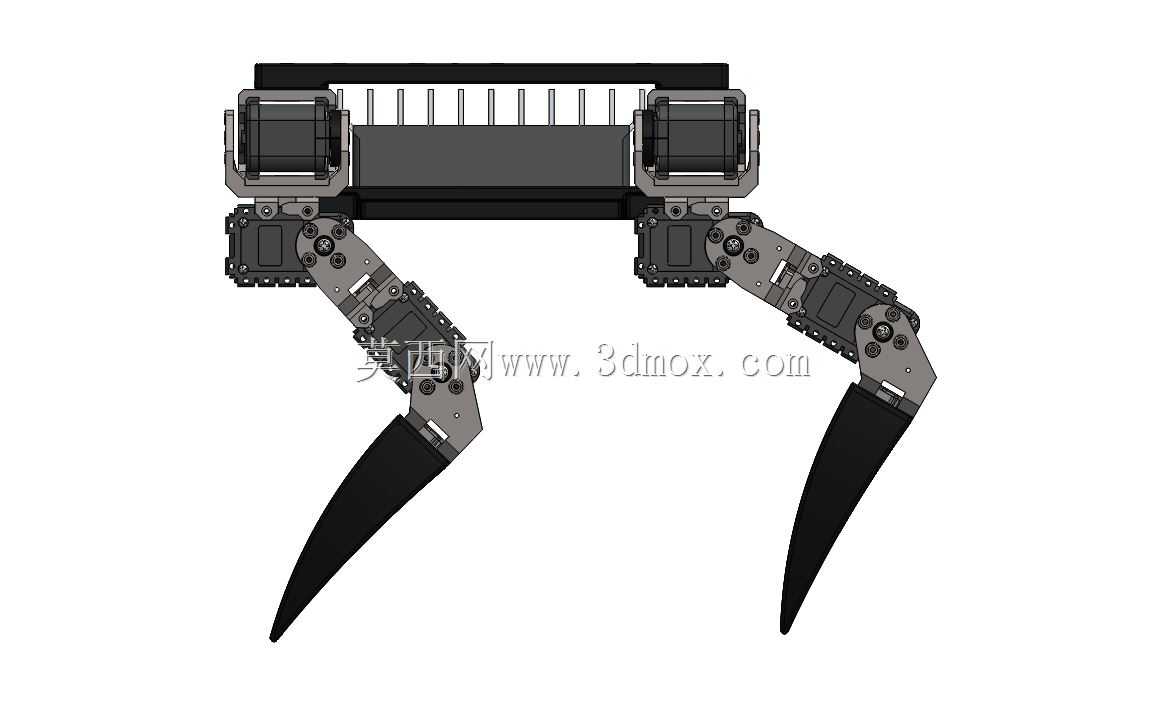
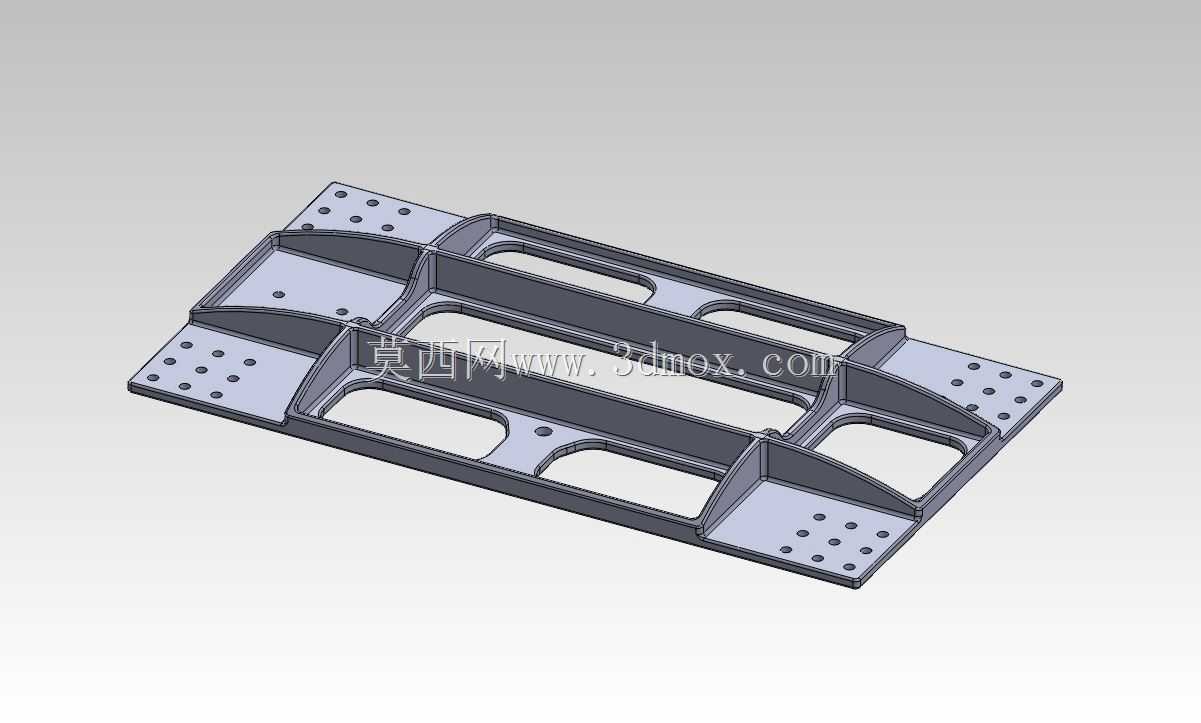
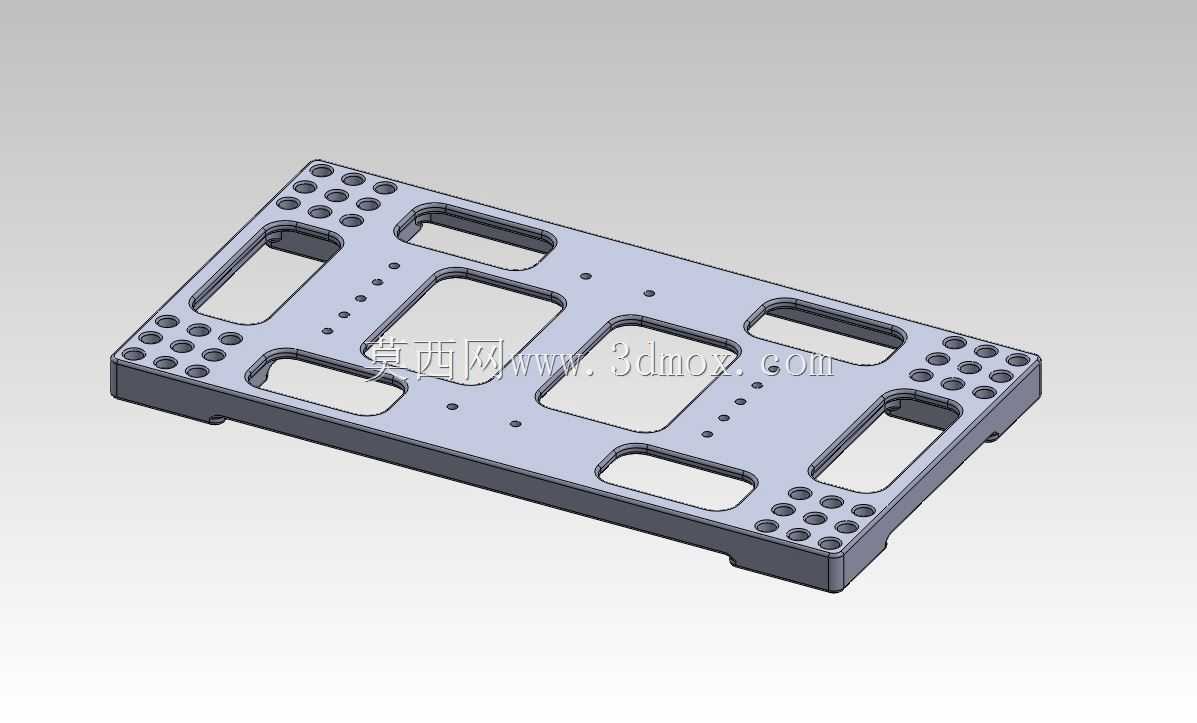




*编辑*替换了装配步骤文件,因为我在打开原始文件时注意到它将尝试创建所有单独的零件文件。这是我在看到波士顿动力公司的Spot迷你机器人后设计和制造的机器人。腿最初是对称配置的(想想蜘蛛状的),但在尝试爬行门时,它被证明是不稳定的。我目前正在开发一个新版本来取代这个版本,该版本将使用带编码器的齿轮电机,而不是Dynamixel伺服。如果有人感兴趣,机器人的身体面板和脚将设置为3D打印。此外,我想感谢Robotis提供STEP模型供下载。它们是FP04-F(1到3)型。AX-12文件是从下载的,但不幸的是,该模型似乎不再存在,上传该模型的个人也不存在
标签:


- 模型大小 :61.91 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :Rendering,STEP / IGES,STEP / IGES,STEP / IGES,Rendering,STEP / IGES,STEP / IGES,STEP / IGES,STEP / IGES,STEP / IGES,STEP / IGES





















