OrbiLux月球定日镜


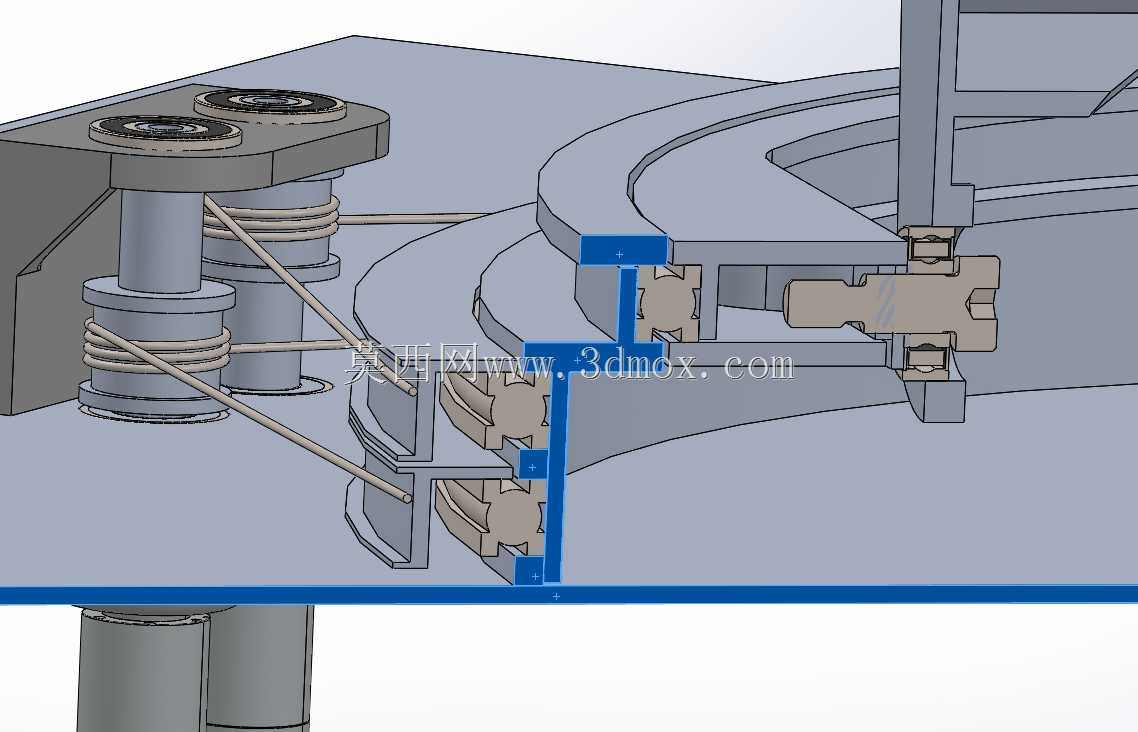
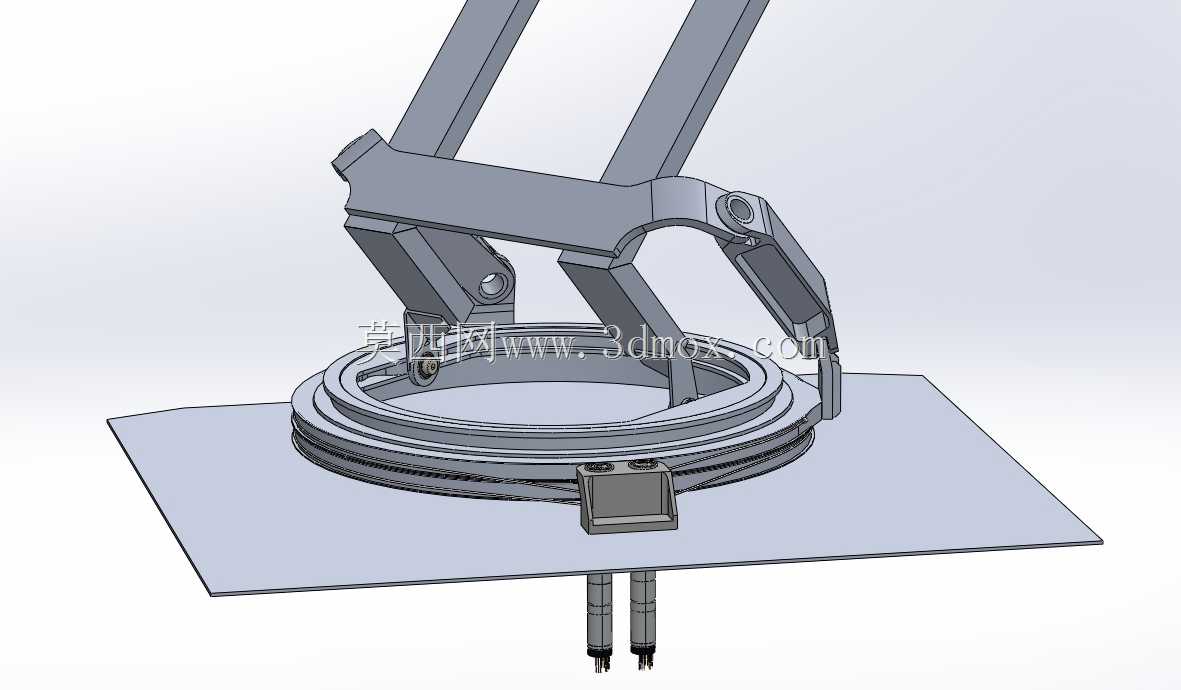





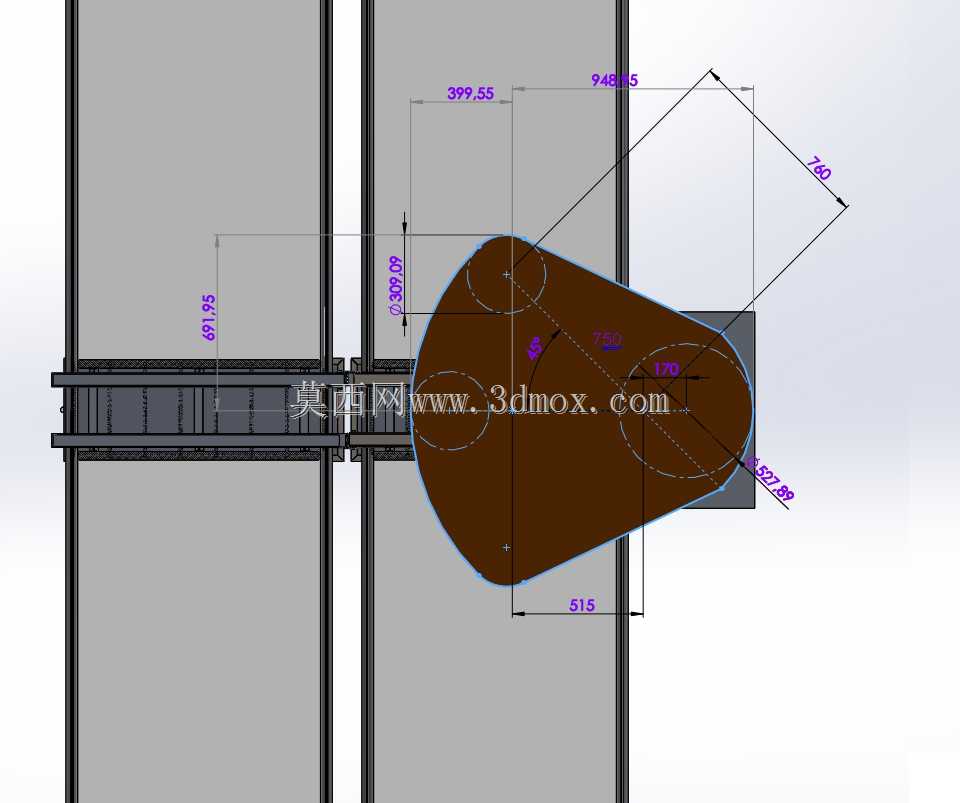
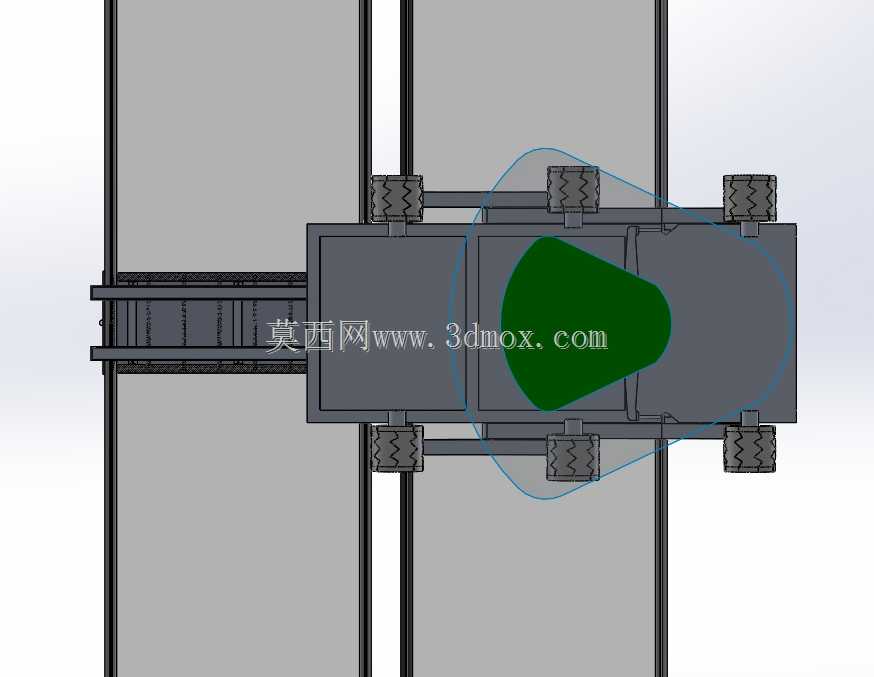

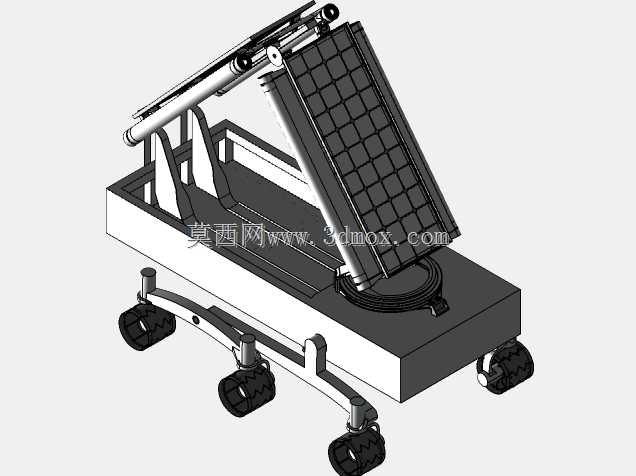
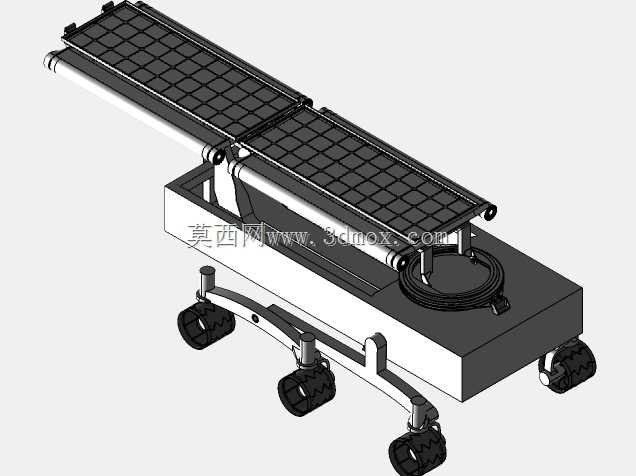
OrbiLux是一款安装在月球车上用于月球运行的定日镜,用于将阳光重定向到阴影区域。它的特点是从有限的体积、大而平的反射镜进行自动化开发,以实现高效的太阳光重定向,并且设计的目标是重量轻,特别是用于反射镜驱动和部署。这是美国宇航局月球火炬挑战赛的入场券。它提供了两个由Orbi-2s机构驱动的铰链式面板(平行运动2自由度球形手腕,无任何万向节锁),每个反射面积总计10平方米的区域上有两个镜子。每个太阳能电池板还配备了一块表面面积为0.5m2的6mil太阳能电池板(参考重量取自https://www.spectrolab.com/DataSheets/Panel/panels.pdf). 由于采用了预应力展开机构,安装后视镜时会产生内部张力,使其在双稳态管末端的4个固定点之间保持拉紧状态,从而使其具有无卷曲且平坦的形状。太阳传感器安装在两个面板上;该机构的运行基于传感器的反馈,这些传感器直接提供每个面板的方位角和仰角数据。该机构的估计重量(来自轴承及其支撑板及以上,以及位于探测车一个绝缘箱内的执行器)为34 kg。面板本身重量为11.5kg。这考虑了在部署时用于支撑月球重力的结构梁。罗孚设计是一种带有倾翻补偿的摇臂转向架设计,灵感来自MSL设计。它采用了一种通用的坚固方法进行设计,对于任务来说可能太重(115 kg),但它显示了所需的基本原则。它包括用于电池、电子设备和电机的绝缘盒,以及通信设备和充电插头或感应设备(CAD中未包含这些设备的详细信息)。所有6个车轮均已转向和驱动。展开前,将其包装在1.97 x 1.17 x 0.98 m的占地面积内。面板展开通过启动Orbi-2机构来执行面板展开,无需进一步的执行器。包装后,两块面板相互叠放,通过铰链连接,第二块面板位于月球车结构内部。第一个面板由致动器升起,而第二个面板在导轨上滑动,直到被提起。此时,铰链轴上的扭转弹簧使其倾斜约40度。该角度允许其越过月球车的突出部分。然后将面板取下,但第二个面板现在在罗孚平台上的导轨上滑动。一旦面板回到平坦位置,两个面板将锁定到位,以使两个后视镜平行。该位置也是定日镜停车位置。现在可以提起两个面板,展开后视镜,然后启动定日镜。后视镜展开后视镜为薄反射膜,400μm Dyneema膜,由25μm聚酯薄膜覆盖,以提高反射率(厚度受Salazar等人2017年的启发,由于面积较低,厚度略有减少).它们与双稳态复合半管(BCHT)轧制在一起,BCHT的突出形状和轧制形状均稳定。两者之间的转换是通过驱动一组与BCHT+反射膜线圈缠绕在一起的形状记忆合金来实现的。这些管子过去曾用于空间应用,如ROSA太阳能电池阵列(https://www.dss-space.com/products-flex-blanket)或者立方体卫星上的实验(Reveles等人,2017年)。为了保持镜面平整,需要以特定的方式制造BCHT。它们通常由安装在管道上的环氧预浸布固化而成,其形状通常是直的。预浸料不是直的,而是安装在管道上形成螺旋;这不会改变卷曲状态下的形状,镜子将以这样一种方式连接到管上,即在展开后固定镜子的两个管中显示相反的扭转。这种相反的扭转会给后视镜带来张力,使其在面板长度方向上保持拉紧状态。在横向上,安装了一组弹簧,在所有阶段都保持横向张力,包装和拆开包装。因为两个后视镜都位于单独的面板上,安装在轻质结构上,并且可以在与重力成较大角度的范围内使用,增加了两个面板之间相对角度的主动驱动。该提案在面板之间的铰链锁紧机构中使用了一组压电致动器,以便在面板之间产生一个小的角行程,足以使面板平行。控制方案将致力于消除两个面板中太阳高度的任何差异。数据由太阳传感器提供。压电致动器便于使用,因为只需要低冲程。根据CAD提案选择的执行机构允许0.3deg的行程,并能够承受面板的重量。2DOF执行机构使用Orbi-2s机构执行2-DOF U型接头的执行机构,提出了一种新颖的并联-串联混合运动学机构,该机构将由电缆绞盘机构驱动的两个环和带有被动关节的被动环相关联。该机构的平行运动学特性以及除执行器本身外没有齿轮的情况,使其成为一种轻量级的选择。它还在中心留出了一个空白空间,便于敷设电缆,而不存在缠绕和损坏的风险,也不需要滑环,并允许将致动器安装在主绝缘外壳中,而无需使用带相关电缆配件的单独致动器。有此类机构工作的示例:拉瓦尔大学制造的名为AgileEye的三自由度腕部机构是PKM研究社区的传统机构之一(Gosselin et al.,1996)。它已经被Polen Robotics(Lapeyre et al.2021)改编,命名为Orbita,用于三维自由度,具有一个连续的自由度,用于移动仿人机器人的头部。这种以2DOF为特征的特殊执行,命名为Orbi-2s(2表示2DOF,s表示具有串联运动学的混合体),是专为OrbiLux定日镜设计的。驱动环仅通过旋转接头连接到第一个面板上,运动的球面性质受到以下事实的约束:所有旋转关节在一个点(U形接头的中心)相交,以及被动环上的被动关节。该机构仅对旋转接头进行操作,使其对研磨性粉尘等危险更具弹性。大型驱动环和被动环在新一代超薄轴承上运行,需要密封以防止灰尘进入(CAD中未显示密封)。这些轴承现在越来越多地用于轻型机器人――尽管如此,它们仍占该机构重量的很大一部分,总共约2千克。设计中选取的参考(Franke LER3-0400和0450)在倾斜时达到21.1 kNm,每个重量约为700 g,而在完全展开状态下月球上的预期扭矩小于100 Nm;因此,通过使用比标称设计更少的滚珠对轴承进行特殊操作,可以进一步节省一些重量。致动器在Maxon范围内挑选,用于连续支撑面板的重量。电机和齿轮箱各重170 g,可提供高达4.3 Nm的扭矩。然后,绞盘机构使用直径为1.5mm的不锈钢电缆驱动驱动环,并显示输入和输出滚筒半径之间的20:1比率。特色机构可以驱动面板从水平下方到垂直(总范围102度)的高度,以及+/-45度的方向。其他较重的结构,包括齿轮,将允许在方向上完全转动,甚至多圈转动(但这将受到需要从探测车车身到面板的电缆的阻碍).稳定性分析稳定性分析仅确定鞋底机构及其支撑板以及承载面板的稳定多边形尺寸。不考虑路虎车体和转向架。考虑的总成总重量为34kg。除非另有说明,否则应给出与机构中心点相关的坐标,该中心点本身位于当前月球车设计中距地面750mm处,距月球车中心点前方515mm处,以及月球车对称平面上。当面板水平时,质心位于760mm后方,面板对称平面上机构中心点上方140mm。当面板垂直时,质心位于机构中心点上方770mm处,向前170mm,位于面板对称平面上。图片显示了具有10°坡度的稳定多边形的形状,它也包含在主CAD文件中。它向前延伸950mm,向后延伸400mm,从月球车中心点开始的侧面延伸700mm。图片上的绿色表面是整个探测车的稳定性多边形,当探测车车身和转向架重量加在一起为34千克(这是一个较低的估计值),质量中心位于rov中心。在这种情况下,上面给出的整个月球车尺寸的稳定性多边形除以2。根据目前对月球车的重量估计,多边形实际上被除以4。月球车设计月球车设计使用铝夹层梁进行结构设计,使用铝面板进行封闭。它具有两个用于电子设备和电池的绝缘腔,其中一个已经容纳了Orbi-2s机构的执行器,其他电子设备(通信、充电、电机驱动、智能)在其中还需要定位。罗孚悬架和驱动装置是一种MSL启发的6轮摇臂转向架设计,配备有连接两个转向架的防倾翻杆。转向架横梁由实心铝合金制成,其重量尚未优化。所有车轮均由Maxon系列的30W齿轮马达驱动和转向。为了让月球车绕着穿过Orbi-2s机构中心点的轴转动,所有6个车轮都需要


- 模型大小 :248.06 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,STEP / IGES,STEP / IGES,Rendering,STEP / IGES