Soomba机器人
移动机器人,设计用于在避开障碍物的同时跟踪物体或轨迹。它是由Roomba 606真空机器人设计的,机器人上嫁接了控制板和传感器。Soomba是索尔福德曼彻斯特大学的一个学生项目


- 模型大小 :109.15 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,STEP / IGES,Rendering,Wavefront OBJ,OBJ

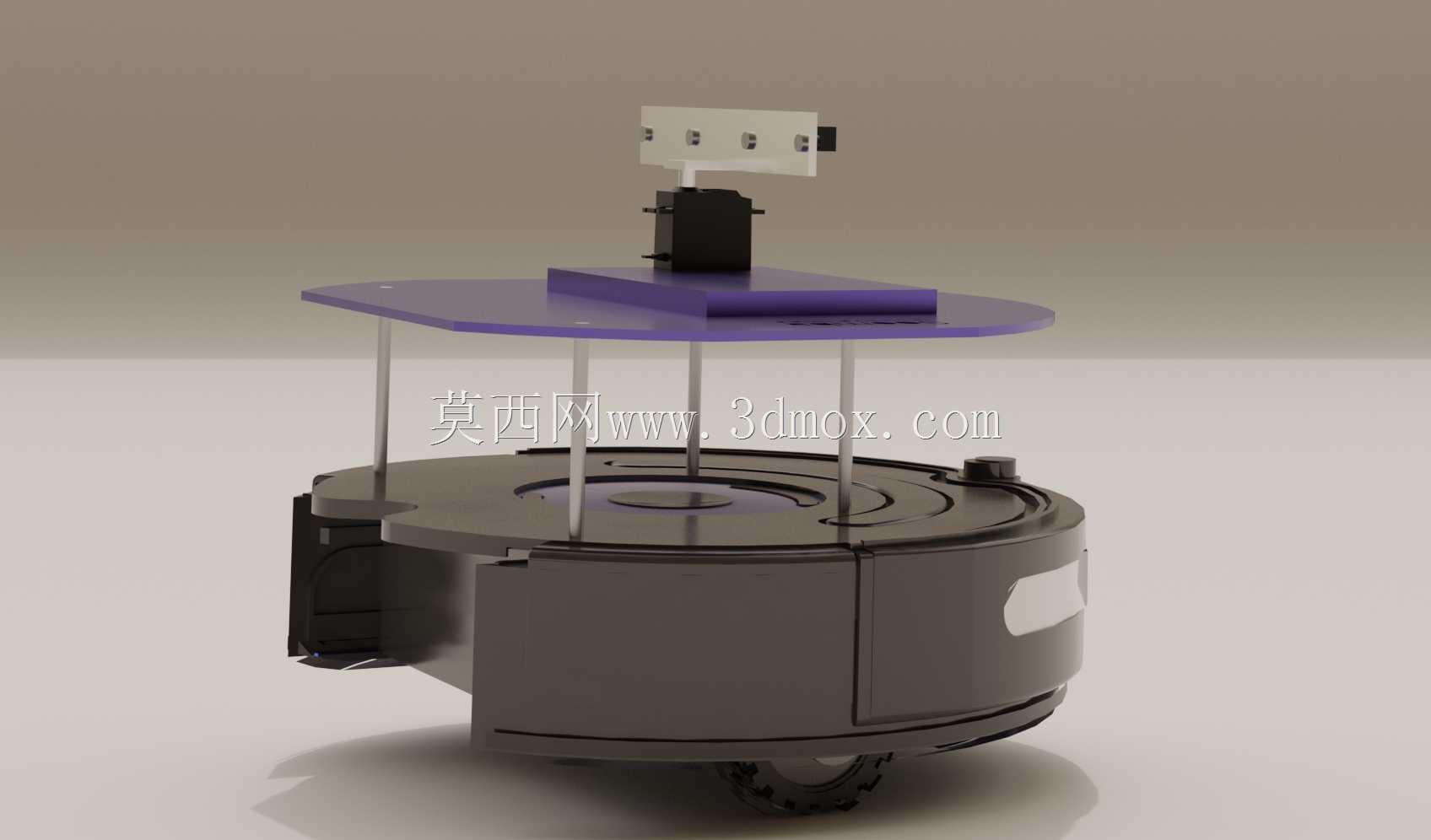
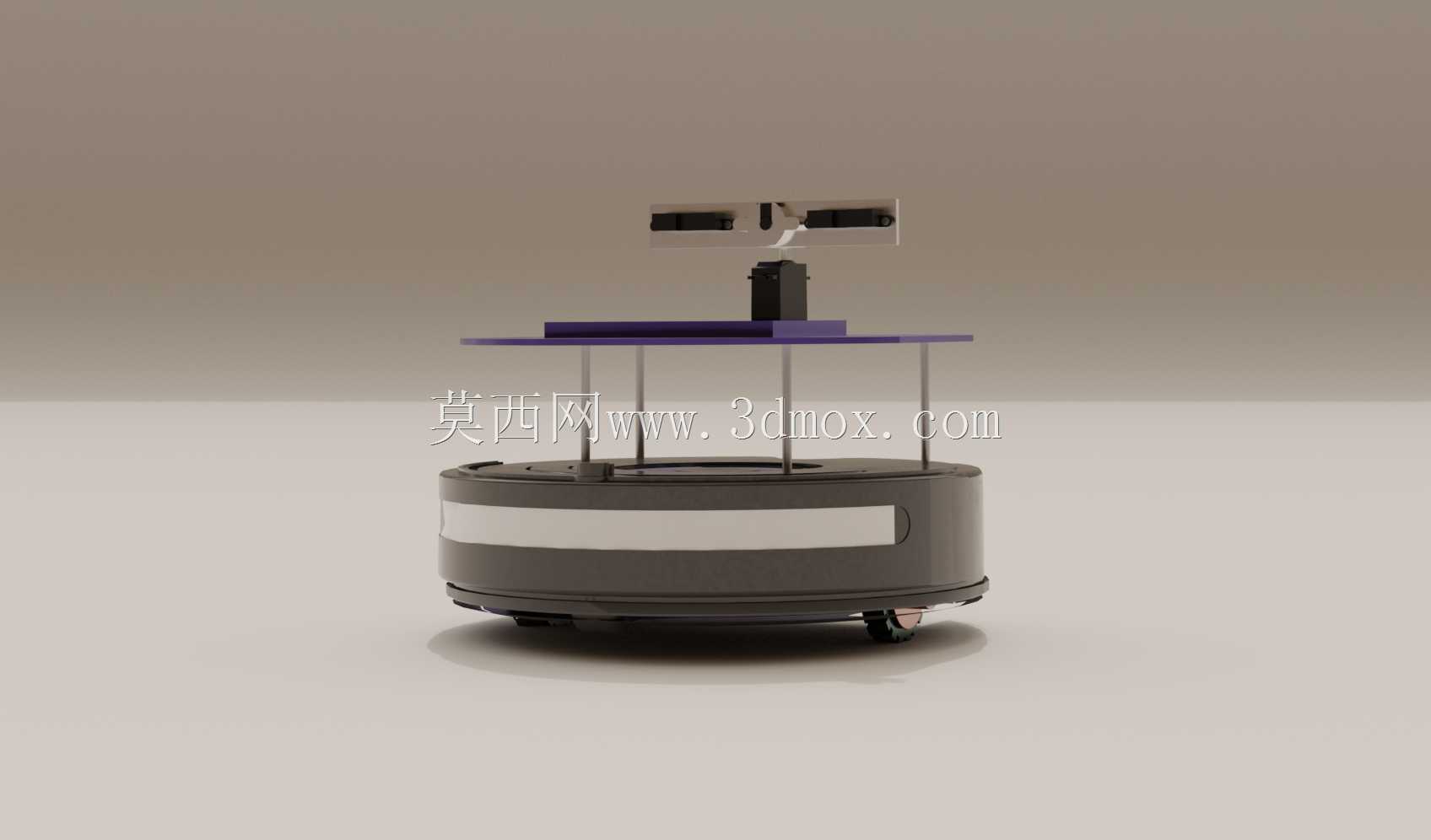

移动机器人,设计用于在避开障碍物的同时跟踪物体或轨迹。它是由Roomba 606真空机器人设计的,机器人上嫁接了控制板和传感器。Soomba是索尔福德曼彻斯特大学的一个学生项目