用于导出到URDF的简单3轮机器人
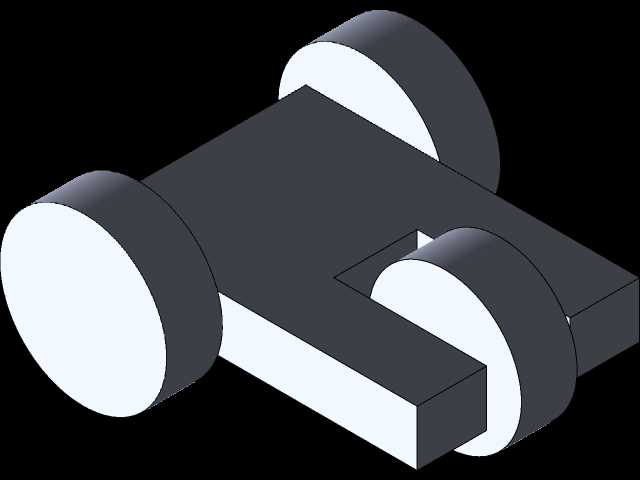
这是一个机器人模型,可以导出到URDF以便在gazebo中进行模拟。诀窍是使用布局,从草图生成块,并从这些框生成零件。导出到URDF时,我经常遇到的一个常见错误是关节不在我指定的位置。这可能是因为导出器如何读取配合以转换为关节。解决这个问题的方法是使用布局。布局通常用于自顶向下的设计。通过使用此选项,可以指定在不使用mate的情况下对齐每个零件的位置,并且关节将位于所需的位置。如果有任何问题,请随时发表评论:)
标签:


- 模型大小 :663.27 KB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS,SOLIDWORKS,Rendering,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS