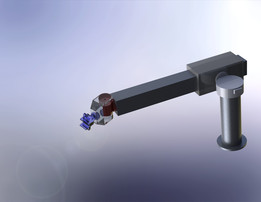
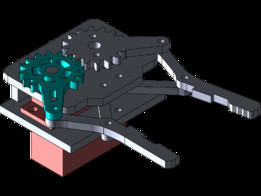
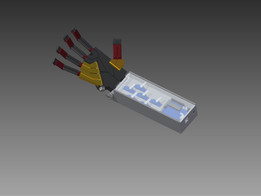
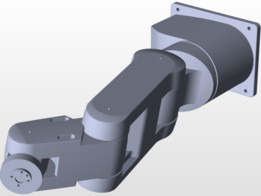
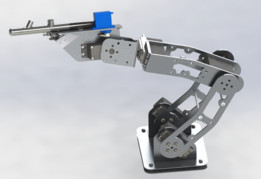
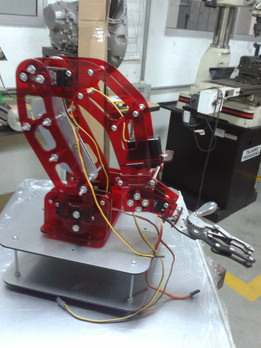
3指夹持器|机械臂
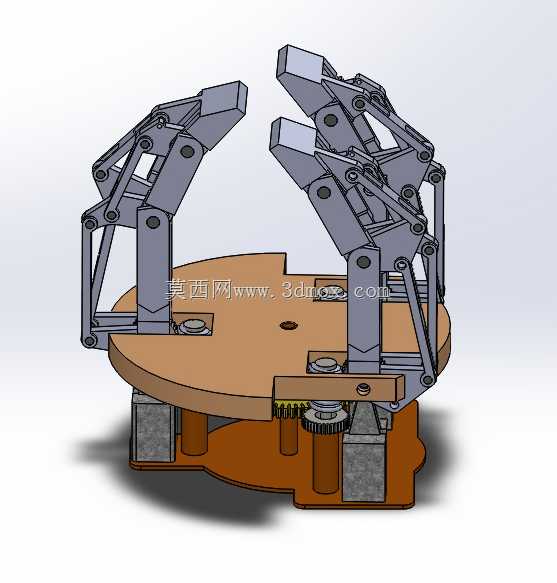
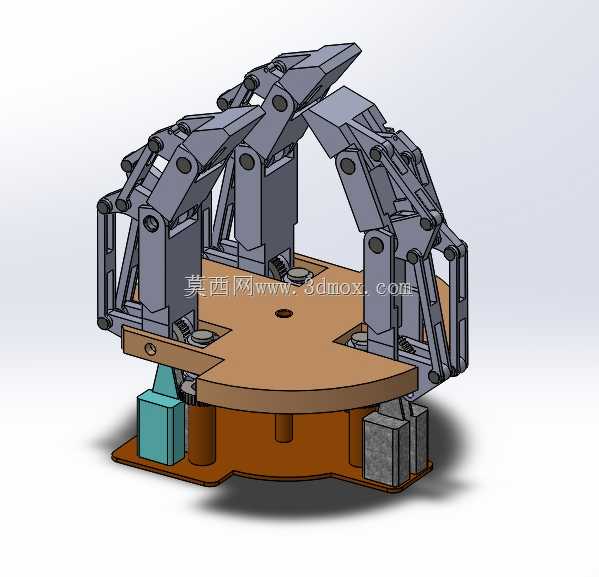
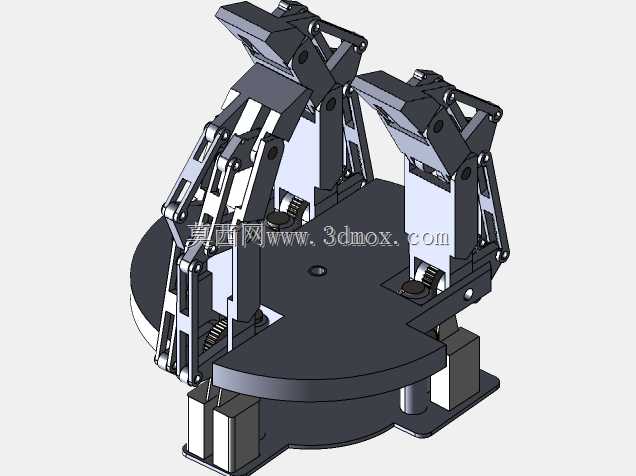
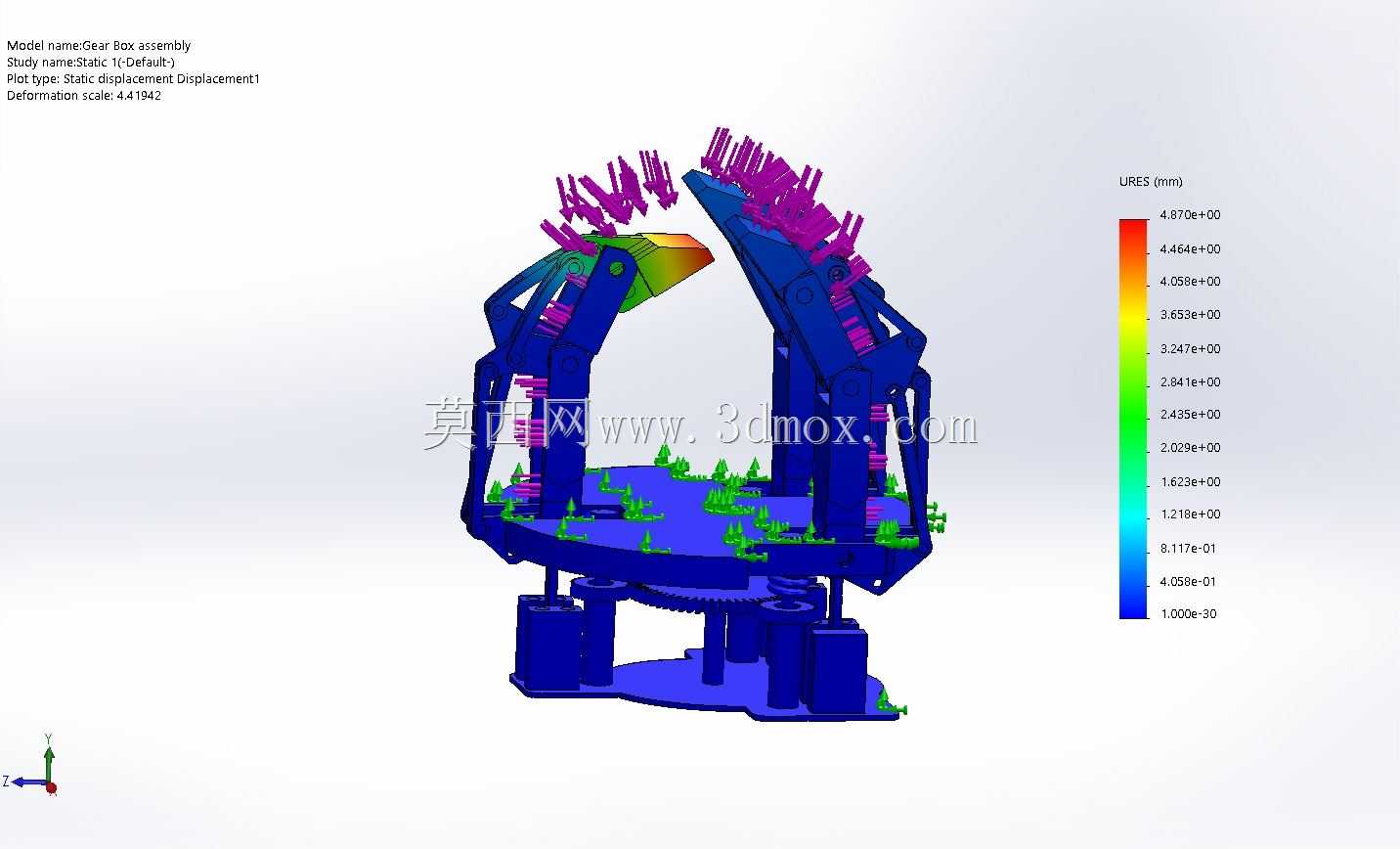
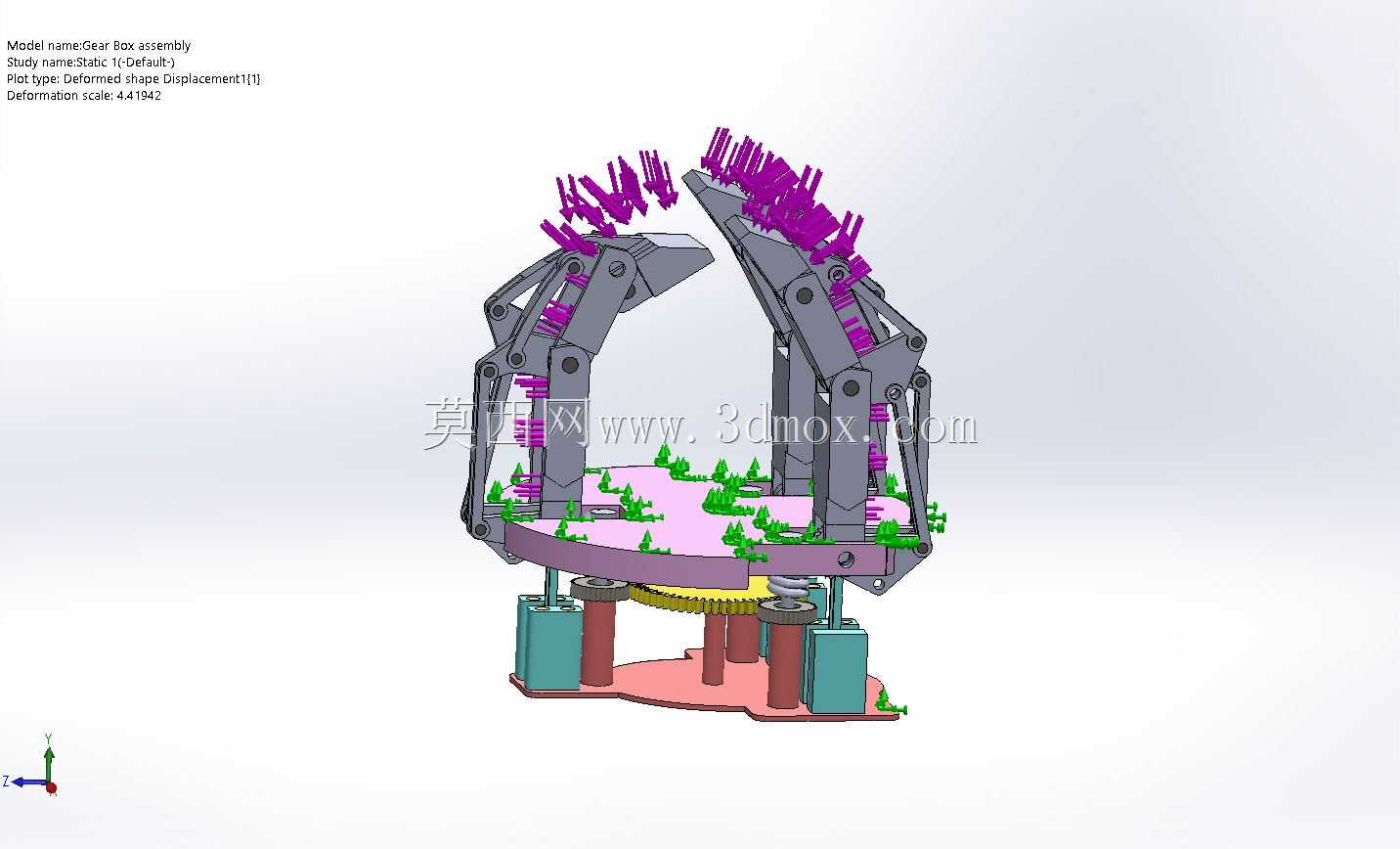
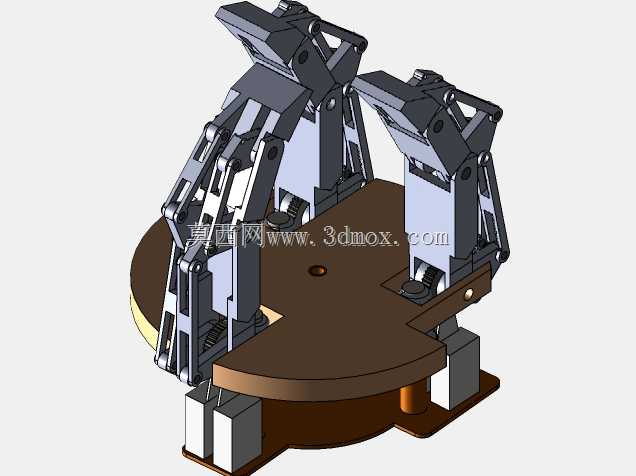
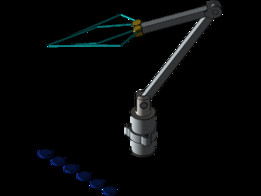
三指自适应夹持器是先进制造和机器人研究的理想选择。它适应对象的形状,以实现稳固的抓握。自适应抓握器有三个铰接的手指,每个手指有三个关节(每个手指有三个指骨)。抓握器最多可以与对象接触十个点(每个指骨加上手掌上有三个)。手指可以让他们自动适应他们抓取的物体的形状,这也简化了抓取器的控制。这是一个自适应三指抓取器的设计和仿真,显示了设计的有效性


- 模型大小 :15.46 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :Rendering,STEP / IGES,STEP / IGES,Rendering,Other,Rendering