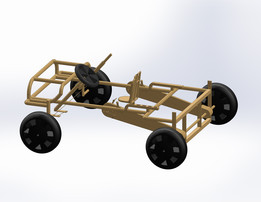
Arduino蜘蛛机器人(四足)

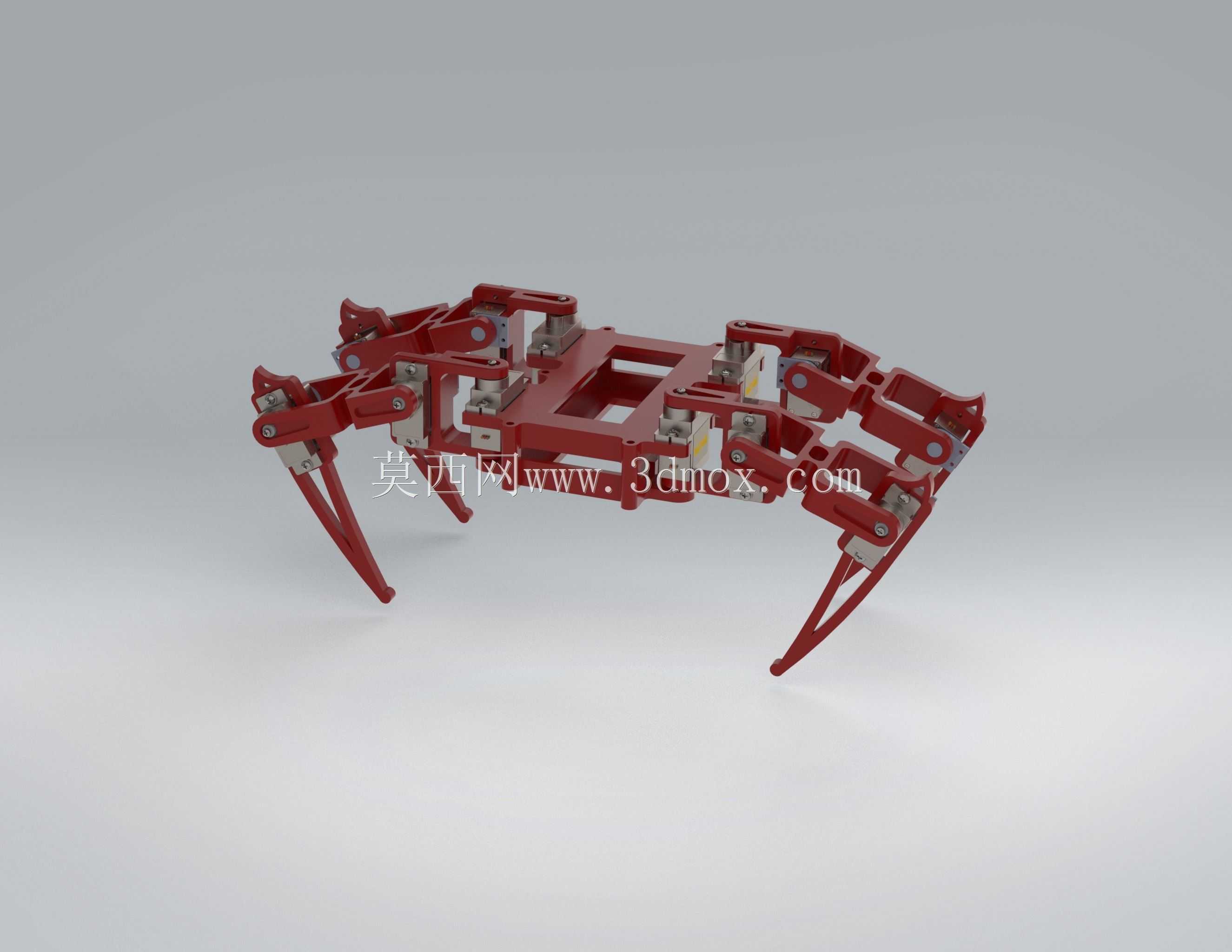

机器人是蜘蛛运动的基本代表,但它不会执行完全相同的身体动作,因为我们只使用四条腿而不是八条腿。也被称为四足机器人,因为它有四条腿,并使用这些腿进行运动,每条腿的运动与其他腿相关,以确定机器人的身体位置,并控制机器人的身体平衡。腿式机器人比轮式机器人更好地处理地形,并以多种动物方式移动。然而,这使得腿部机器人更加复杂,许多制造商也难以接近。此外,制造成本和制造商制造全身四足动物所需的高依赖性,因为它基于伺服电机或步进电机,两者都比轮式机器人中使用的直流电机更昂贵


- 模型大小 :144.98 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS,Rendering,Parasolid,Rendering