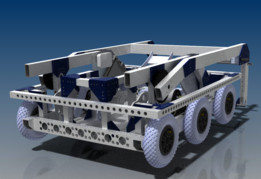
三轮车

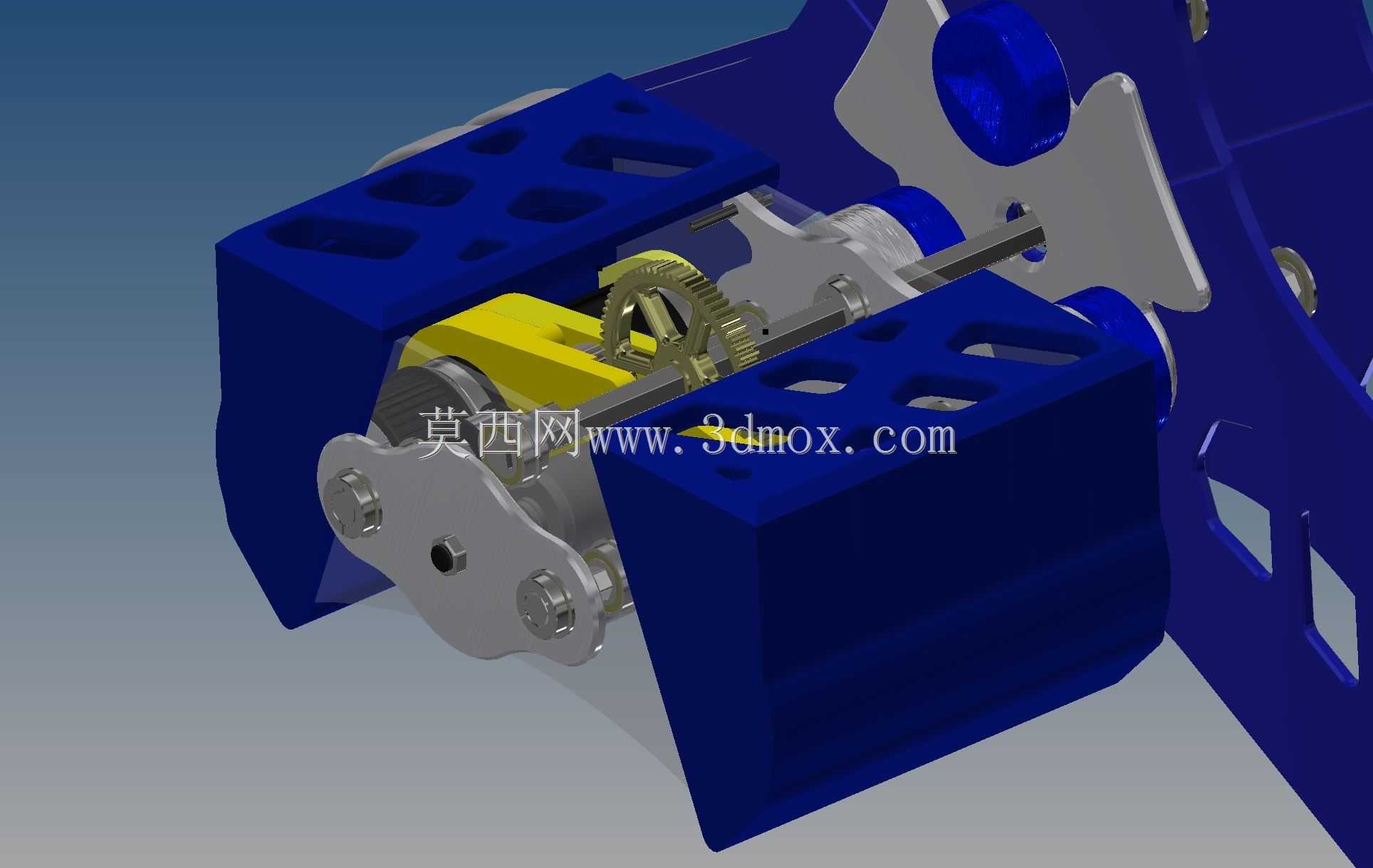
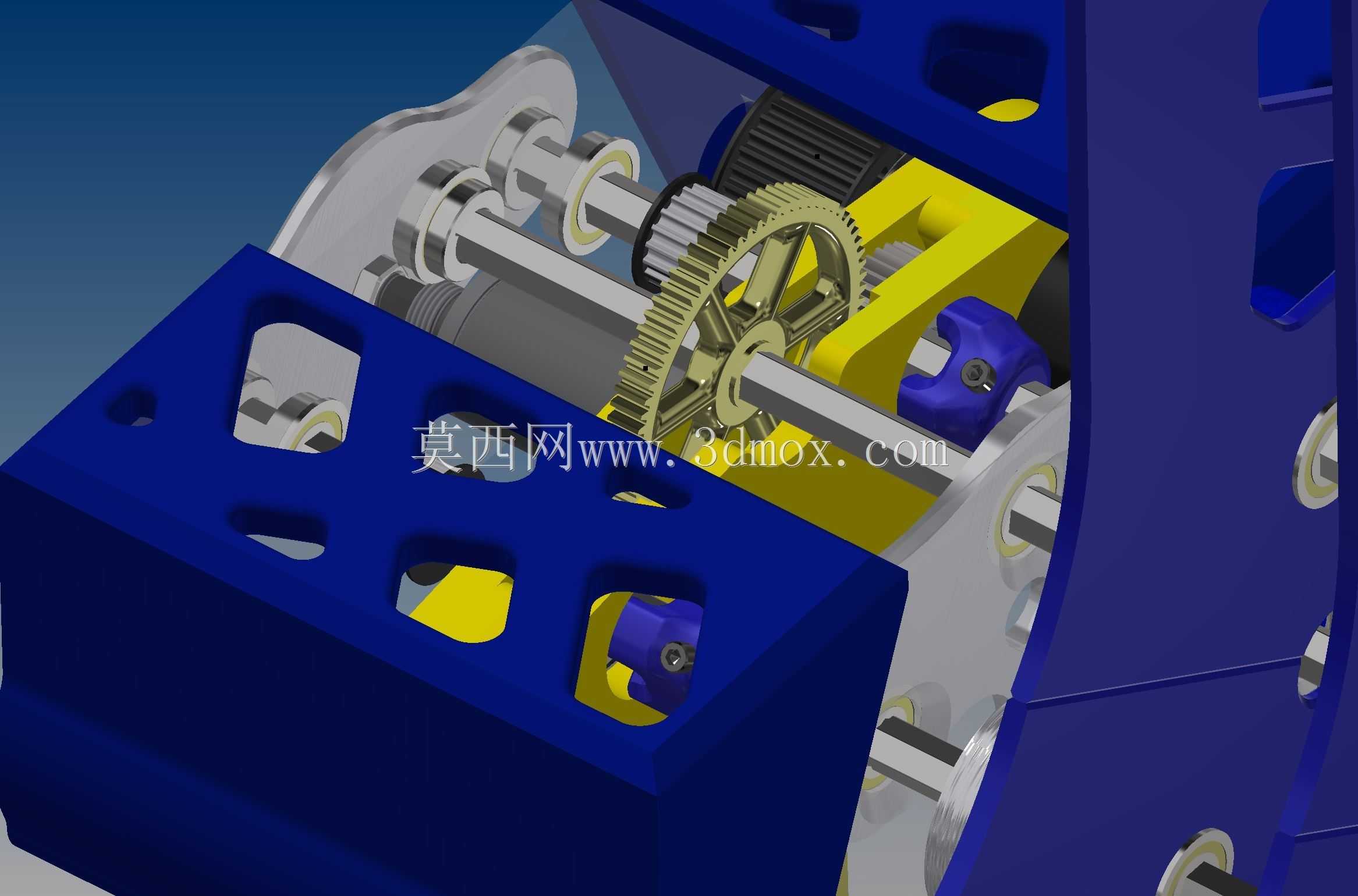
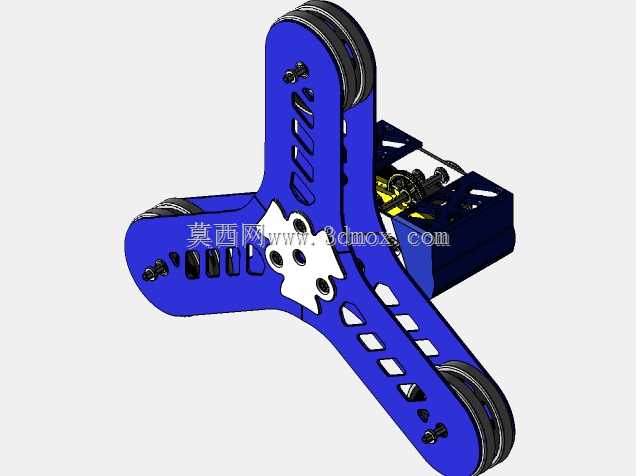
这个轮子的设计目的是帮助自动救援机器人轻松穿越紧急区域。在车轮旋转和三角组件旋转之间交替,该模型应能够穿过完整的地面和大碎片。该设备的工作原理是利用其核心的定制传动装置。变速器,而不是改变速度-扭矩比,切换正在转动的东西。它通过最初为较低的两个车轮提供动力来完成这项任务。然后收回驱动这些车轮的车轴。然后翻转大三角形,直到需要为止。翻转大臂时,在掉落的碎片上爬行。地面上的任何两个车轮都将车轴放回其中。然后,总成可以再次在平地上行驶
标签:


- 模型大小 :10.27 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,Rendering