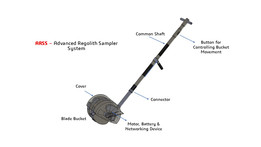
ARSS-高级风化层采样器系统
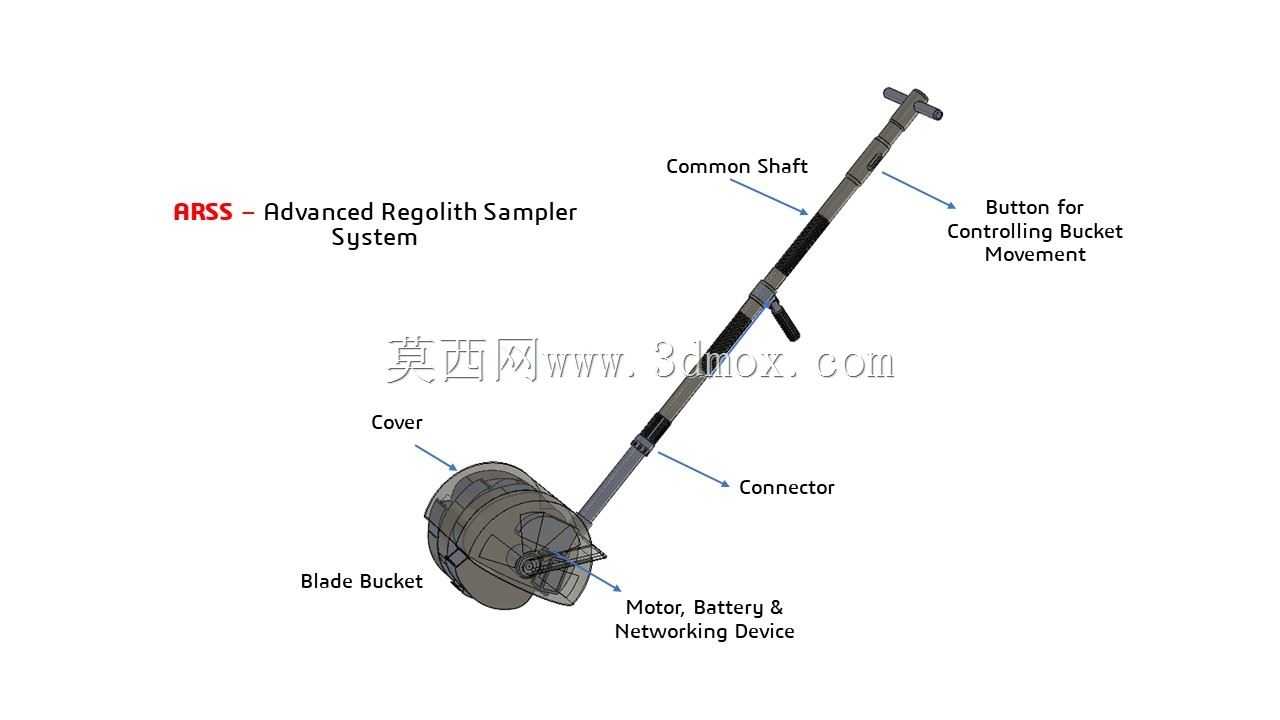
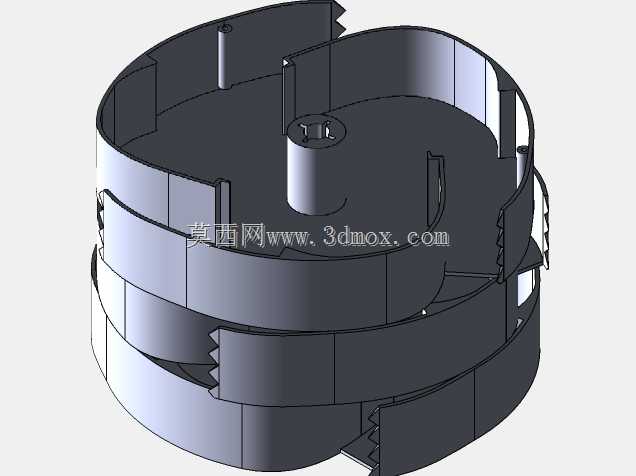
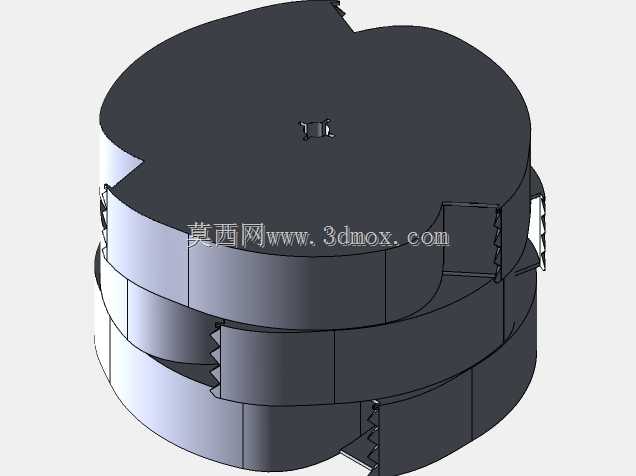
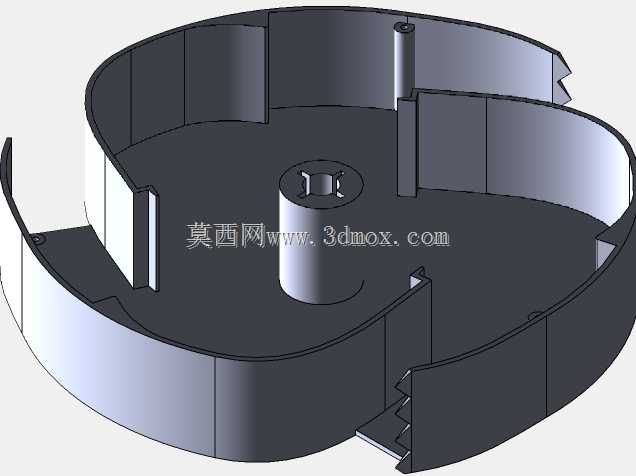
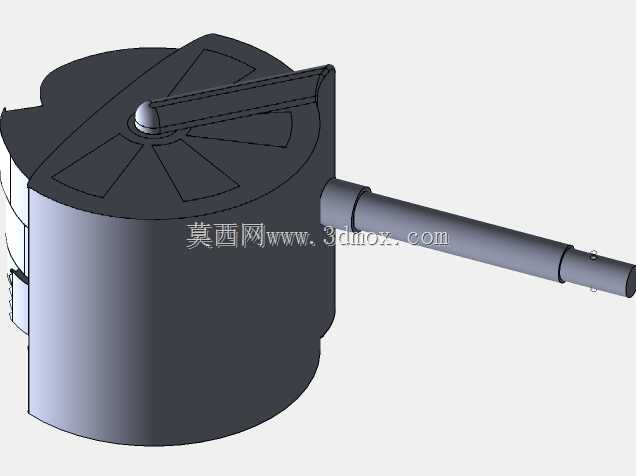

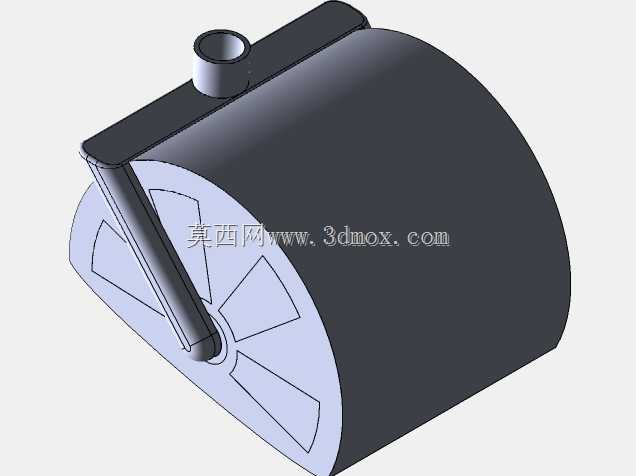

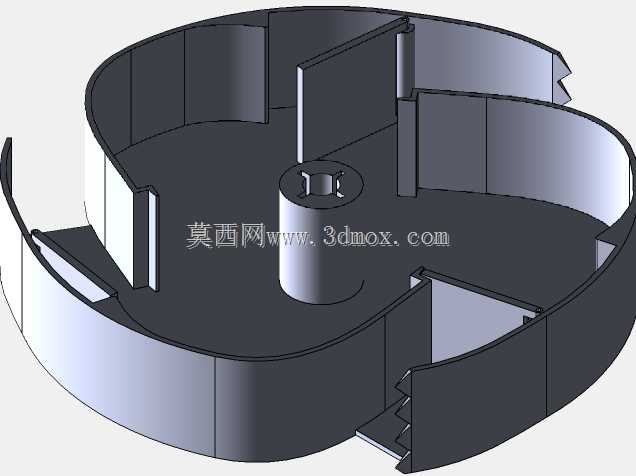
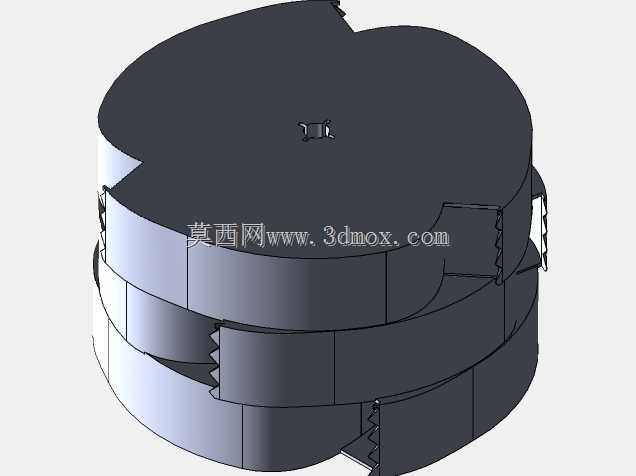





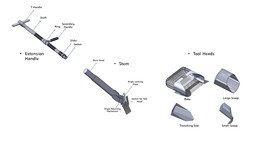
受RASSOR项目开发的启发,我们考虑了旋转风化层捕集桶。ARSS使用电池供电的电机驱动铲斗叶片组(按顺序排列),以确保从行星表面顺利铲取表土。铲斗具有切割齿以便于收集表土,并具有铰链式网关以控制开启和关闭。在顺时针方向旋转时,叶片铲起表土并将其截留。当宇航员逆时针旋转时,物质被排出。计算表明,宇航员的反作用力足以作为达到目的所需的累积反作用力。因此,我们没有使用反向旋转的鼓轮来减轻RASSOR等相反的反作用力。最后,之前在太空三叉戟工具集中建造的把手经过更新,包括t型领附近的三个按钮,并与无线通信配置相结合,以与ARSS工具进行通信。通过切换按钮,宇航员可以开始切割操作并指定卸料方向


- 模型大小 :3.93 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS,Rendering,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS